

Tinker Board 2S系统与软件安装设定
电子说
描述
/前一篇开箱文介绍了Tinker Board 2S / 2GB的相关硬件规格,可以看出TinkerBoard 2S / 2GB其实在硬件性能方面的已经具备不错的条件,此外,开箱文的介绍里,也提到了Tinker Board 2S采用了aarch64的操作系统架构,以Debian 10 Linux的LXDE桌面环境,更让使用者有着相当不错的GUI使用体验。/
Tinker Board 2S在官方网站上提供了Debian10 Linux操作系统给用户进行安装,相关LXDE桌面环境的套件软件程序,都有相当完整的支持,本文将会着眼在Tinker Board 2S应用在AI范畴中,所应该要在后续的套件软件程序的安装介绍,在这次的系统安装测试过程,我们发现了在Tinker Board 2S安装的Debian 10 Linux操作系统里,为了安装一些常用的AI支持套件程序,在安装过程中仍要补足许多缺漏的相依套件程序,甚至在测试安装的过程里,也发现了有部分的相依套件程序有断裂的问题,甚至无法单纯采用pip3 install或apt-get install的方式进行相依套件程序的安装,得要透过一些其他套件程序进行修补断裂的安装,这部分将会在后续的文章中详细说明。
本文将会针对以下这些AI应用程序设计中常用的套件程序安装进行说明:
1.nano (用于简易文本编辑器操作)
2.OpenCV 4.5.0 (用于相关视觉影像的接口操作)
3.imutils (用于视觉图像处理的接口操作)
4.pillow (用于视觉图像处理的接口操作)
5.tkinter (用于图形用户界面 GUI 程序设计)
6.Tensorflow 2.4.1 与Tensorflow-Lite Runtime 2.5.0 (用于神经网络运算)
7.Python3-Coral (用于GoogleCoral 边缘张量处理单元Edge-TPU加速器运算)
8.SciKit-Learn (用于神经网络运算)
一、安装简易文本编辑器nano
由于在许多的终端机操作环境下需要快速编修文件,采用精巧且功能完整的文本编辑器nano,一直是许多系统操作者的最爱之一,以下说明安装流程:
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install nano
二、安装GTK-2.0相依套件libgtk2.0-dev
本次安装测试的过程当中,在安装OpenCV 4.5.0套件程序时,发生了相依套件断裂的问题,在Tinker Board 2S的Debian 10 Linux系统中因为没有安装GTK-2.0 的libgtk2.0-dev套件程序,这将导致在OpenCV4.5.0因cmake无法将 libgtk2.0-dev相依套件进行编译设定,虽然在后续的make流程都能完成,但最后会在最后Python程序运行时间无法正确使用如imshow、putText等画面显示或绘图的函数,并且会在运行时间报错,并且提示需要重新进行cmake。
为了将libgtk2.0-dev相依套件程序安装至系统,笔者初期使用sudo apt-get install libgtk2.0-dev这种方式安装相依套件程序,但系统却又报错,表示还有许多其他相关相依套件有「相依断裂」的问题,笔者尝试再以sudo apt-get install去安装那些相依套件程序,却依然发现更多的「相依断裂」,更糟糕的是还发生「循环相依」,所谓「循环相依」表示其他的相依套件程序又循环相依libgtk2.0-dev。
为了解决这种「相依断裂」与「循环相依」的问题,最后只能透过额外安装「套件安装设定程序」的方式来解决,本次教学使用的是安装「aptitude」套件程序来解决这个问题。
透过「aptitude」套件程序便可以进行libgtk2.0-dev套件程序安装,以下说明安装流程:
sudo apt-get install aptitude
sudo aptitude install libgtk2.0-dev
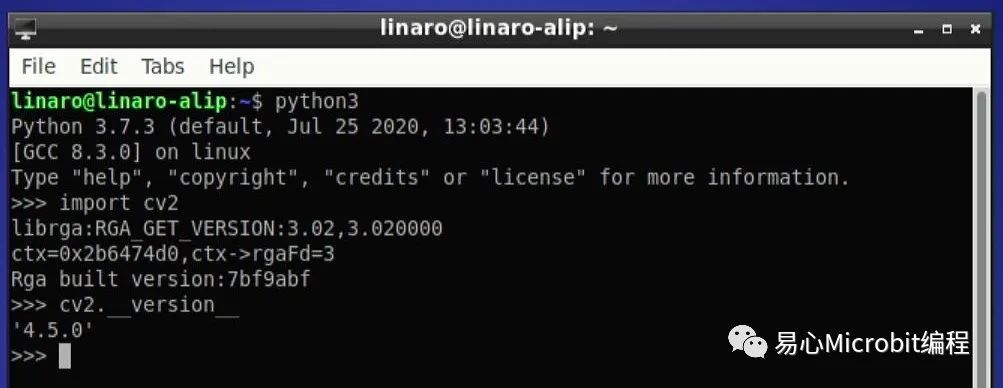
三、安装OpenCV 4.5.0套件程序
在本篇教学采用OpenCV 4.5.0进行视觉影像接口处理,笔者曾尝试以sudo apt-get install python-opencv进行套件程序的安装,结果经过检查发现,以这种方式安装的OpenCV版本是3.6版,虽然简单Python程序函数还是可以执行,可是当遇到更进阶的函数如DNN等相关进阶应用时,便会产生函数缺漏的问题,有鉴于此,笔者选择重新以Build from Source的方式进行安装。
在这里要特别强调一个重要关键,在安装OpenCV 4.5.0套件程序之前,「必须」将前述的GTK-2.0相依套件libgtk2.0-dev先行安装完成,切莫跳过这个重要步骤。
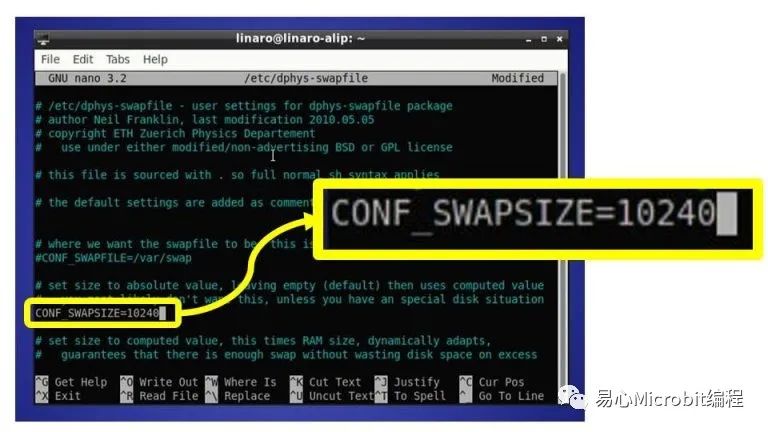
由于OpenCV 4.5.0的安装过程需要大量的内存运作空间以进行后续的make流程,因此必须先行安装虚拟内存的套件程序,并且将虚拟内存设为10240MB,并且将Tinker Board 2S重新启动,以下说明虚拟内存设定流程:
sudo apt-get update
sudo apt-get upgrade
#安装dphys-swapfile套件程序
sudo apt-get install dphys-swapfile
#以nano编辑/etc/dphys-swapfile配置文件案
sudo nano /etc/dphys-swapfile
#寻找#CONF_SWAPSIZE= 字符串内容,并且将批注符号# 取消。
#设定CONF_SWAPSIZE=10240
#离开nano文本编辑器
#重新启动
sudo reboot
下载并编译安装OpenCV 4.5.0,请注意,这个阶段的安装时间非常久,笔者大约安装了近4小时,且在make阶段时Tinker Board 2S的散热片会产生高温,笔者尝试使用make -j2或make -j4等多核心的编译指令,虽然可以加快make流程,但是这种编译方式会让CPU的散热片的温度飙升,甚至导致热当机的状况很多次,造成make失败多次,因此笔者建议只要采用make这种单核心的编译为佳,且在编译过程务必确保电源稳定,且适当以电风扇在旁边帮助散热,虽然时间很久,但可以确保编译过程安全无误,以下说明OpenCV 4.5.0的安装流程:
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install cmake gitlibgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install libjpeg-dev libpng-dev
sudo apt-get install libavcodec-devlibavformat-dev libswscale-dev
sudo apt-get install libgtk2.0-devlibcanberra-gtk* libgtk-3-dev
sudo apt-get install python3-dev python3-numpypython3-pip
sudo apt-get install libtbb2 libtbb-devlibdc1394-22-dev
sudo apt-get install libv4l-dev v4l-utils
sudo apt-get install libopenblas-devlibatlas-base-dev libblas-de
sudo apt-get install liblapack-dev gfortranlibhdf5-dev
sudo apt-get install libprotobuf-devlibgoogle-glog-dev libgflags-dev
sudo apt-get install protobuf-compiler
sudo apt-get install qt5-default
wget -O opencv.ziphttps://github.com/opencv/opencv/archive/4.5.0.zip
wget -O opencv_contrib.ziphttps://github.com/opencv/opencv_contrib/archive/4.5.0.zip
unzip opencv.zip
unzip opencv_contrib.zip
mv opencv-4.5.0 opencv
mv opencv_contrib-4.5.0 opencv_contrib
cd ~/opencv
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=RELEASE
-D CMAKE_INSTALL_PREFIX=/usr/local
-D OPENCV_EXTRA_MODULES_PATH=~/opencv_contrib/modules
-D ENABLE_NEON=ON
-D WITH_OPENMP=ON
-D BUILD_TIFF=ON
-D WITH_FFMPEG=ON
-D WITH_TBB=ON
-D BUILD_TBB=ON
-D BUILD_TESTS=OFF
-D WITH_EIGEN=OFF
-D WITH_GSTREAMER=OFF
-D WITH_V4L=ON
-D WITH_LIBV4L=ON
-D WITH_VTK=OFF
-D WITH_QT=OFF
-D OPENCV_ENABLE_NONFREE=ON
-D INSTALL_C_EXAMPLES=OFF
-D INSTALL_PYTHON_EXAMPLES=OFF
-D BUILD_NEW_PYTHON_SUPPORT=ON
-D BUILD_opencv_python3=TRUE
-D OPENCV_GENERATE_PKGCONFIG=ON
-D BUILD_EXAMPLES=OFF
-D WITH_GTK=ON ..
make
sudo make install
sudo ldconfig
make clean
至 .bashrc 设定OpenCV 4.5.0路径,安装完成OpenCV 4.5.0之后,必须要设定相关执行路径,若跳过这个步骤,会导致Python程序在import cv2时产生allocation memory 报错,以下说明 .bashrc 路径设定方式:
cd ~
#以nano文本编辑器编辑.bashrc 配置文件
sudo nano ~/.bashrc
#到文件末端将以下叙述补在最后一行
exportLD_PRELOAD=/usr/lib/aarch64-linux-gnu/libgomp.so.1

#执行 .bashrc 内容
source ~/.bashrc
四、安装其他视觉图像处理与图形用户界面套件程序
#安装pillow套件程序
cd ~
sudo apt-get update
sudo apt-get upgrade
pip3 install setuptools
pip3 install pillow
#安装tkinter套件程序
cd ~
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install python3-tk
sudo apt-get install python3-pil.imagetk
#安装imutils套件程序
cd ~
sudo apt-get update
sudo apt-get upgrade
pip3 install imutils
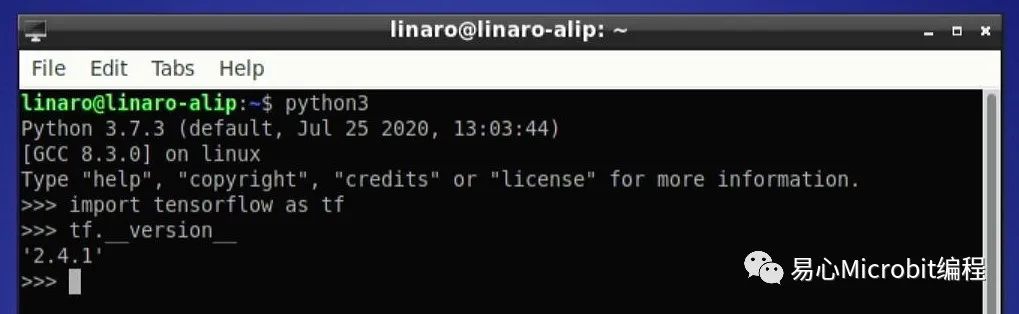
五、安装Tensorflow 2.4.1 神经网络运算套件程序
Tinker Board 2S 具有强大的CPU与GPU运算效能,可进行神经网络运算,搭配OpenCV可以进行各种AI影像辨识的应用,依照Tinker Board 2S的各种硬件规格,笔者认为神经网络的框架可采用Tensorflow 2.4.1来进行神经网络的推论(Inference)运算,以下说明套件程序安装流程:
#更新操作系统套件信息
sudo apt-get update
sudo apt-get upgrade
#更新安装pip3套件程序
sudo apt-get install python-pip python3-pip
#移除旧版Tensoflow套件程序
sudo pip uninstall tensorflow
sudo pip3 uninstall tensorflow
#安装各种系统相依套件程序
sudo apt-get install gfortran
sudo apt-get install libhdf5-devlibc-ares-dev libeigen3-dev
sudo apt-get install libatlas-base-devlibopenblas-dev libblas-dev
sudo apt-get install liblapack-dev
#安装各种Python3各种套件程序
sudo -H pip3 install --upgrade setuptools
sudo -H pip3 install pybind11
sudo -H pip3 install Cython==0.29.21
sudo -H pip3 install h5py==2.10.0
#安装下载工具
pip3 install gdown
sudo cp ~/.local/bin/gdown/usr/local/bin/gdown
#下载Tensorflow 2.4.1套件程序安装文件
gdownhttps://drive.google.com/uc?id=1WDG8Rbi0ph0sQ6TtD3ZGJdIN_WAnugLO
#安装Tensorflow 2.4.1套件程序
sudo -H pip3 installtensorflow-2.4.1-cp37-cp37m-linux_aarch64.whl
六、安装Tensorflow-Lite Runtime 2.5.0 套件程序
对于Tinker Board 2S / 2GB而言,由于受限于主存储器仅有2GB的缘故,因此对于神经网络进行推论运算时所需使用的主存储器容量,就必须要谨慎运用这有限的容量,若需要在神经网络推论时有较高的运算效能,往往就必须要选择神经网络模型规模较小的模型格式,在Tensorflow族系里有种Tensorflow-Lite格式就是一种模型规模较小的格式,在Tensorflow的原厂网站里也特别将Tensorflow-Lite格式定义适用于物联网IoT应用的场合当中,以下说明套件程序安装的方式:
cd ~
sudo apt-get update
sudo apt-get upgrade
pip3 installhttps://github.com/google-coral/pycoral/releases/download/v1.0.1/tflite_runtime-2.5.0-cp37-cp37m-linux_aarch64.whl
七、安装google Coral Edge-TPU Pthon套件程序
若想在边缘装置提升神经网络的运算效能,常会在边缘运算装置上外加神经网络运算加速装置,最常用的做法,便是透过USB连接神经网络运算加速装置的方式进行扩充,Tinker Board 2S有强大的USB 3.0接口可以运用,笔者为了能够在Tinker Board 2S上充分发挥Tensorflow-Lite的效能,因此选择透过google推出的Coral Edge-TPU USB Accelerator安装在Tinker Board 2S上,透过Edge-TPU强大的运算效能,让AI的各种应用都能有高速的反应。
以下说明Python3-Coral套件程序安装方式:
echo "debhttps://packages.cloud.google.com/apt coral-edgetpu-stable main" | sudotee /etc/apt/sources.list.d/coral-edgetpu.list
curlhttps://packages.cloud.google.com/apt/doc/apt-key.gpg | sudo apt-key add -
sudo apt-get update
sudo apt-get install libedgetpu1-std
sudo apt-get install python3-pycoral
八、安装其他支持神经运算的套件程序SciKit-Learn
cd ~
sudo apt-get update
sudo apt-get upgrade
sudo pip3 install sklearn
以上是针对Tinker Board 2S在后续应用在AIoT主题开发所安装的各种套件程序安装教学,笔者将会在后续文章中介绍Tinker Board 2S在神经网络运算的效能,将会透过笔者设计的Python3范例程序进行本篇各种套件程序的测试效能,敬请各位读者拭目以待啰!
审核编辑 :李倩
-
请问按键2S如何实现啊2011-05-10 2793
-
小米2S刷机教程2015-08-27 7306
-
Flint OS for Tinker Board发布相对稳定版2017-07-05 5490
-
华硕ASUS tinker board S开发板调试的经验分享2019-03-09 4470
-
ASUS华硕tinker board 2S瑞芯微RK3399开发板怎么样?2022-03-07 1536
-
全“芯”升级 小米手机2S详细拆解2013-04-14 37591
-
好高兴又可以用小米2S啦!你的小米2S还在吗?2017-03-03 5210
-
s=surprise,发布会后大家都这样评价nova 2s2017-12-08 1346
-
来了来了!最新小米MIX 2S曝光2018-03-02 3781
-
小米 MIX 2S 与 MIX 2 对比图赏2018-04-13 10539
-
谷歌ARCore登陆中国市场 小米Mix 2S应用商店首发2018-05-30 1611
-
小米Air 2s无线耳机固件更新2020-11-18 10497
-
小米Air 2s已修复电量10%时概率无法充电问题2020-12-01 6327
-
Tinker Board 2S嵌入式系统开箱介绍2022-11-07 2714
-
ASUS Tinker Board 2S新版Debian 10 V2.0.3系统与相依套件安装2023-04-11 4206
全部0条评论

快来发表一下你的评论吧 !
