

 STM32CUBEMX(14)--SPI,TLC5947外部PWM移植
STM32CUBEMX(14)--SPI,TLC5947外部PWM移植
描述
概述
SPI是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,越来越多的芯片集成了这种通信协议,比如 EEPROM,FLASH,实时时钟,AD转换器。 TLC5947是一款SPI接口的PWM脉宽调制24路LED驱动模块/RGB LED驱动器芯片,它能驱动24路的PWM。
硬件准备
首先需要准备一个开发板,这里我准备的是NUCLEO-F030R8的开发板:

外部PWM模块就是淘宝上SPI接口的TLC5947模块。 
选择芯片型号
使用STM32CUBEMX选择芯片stm32f030r8,如下所示: 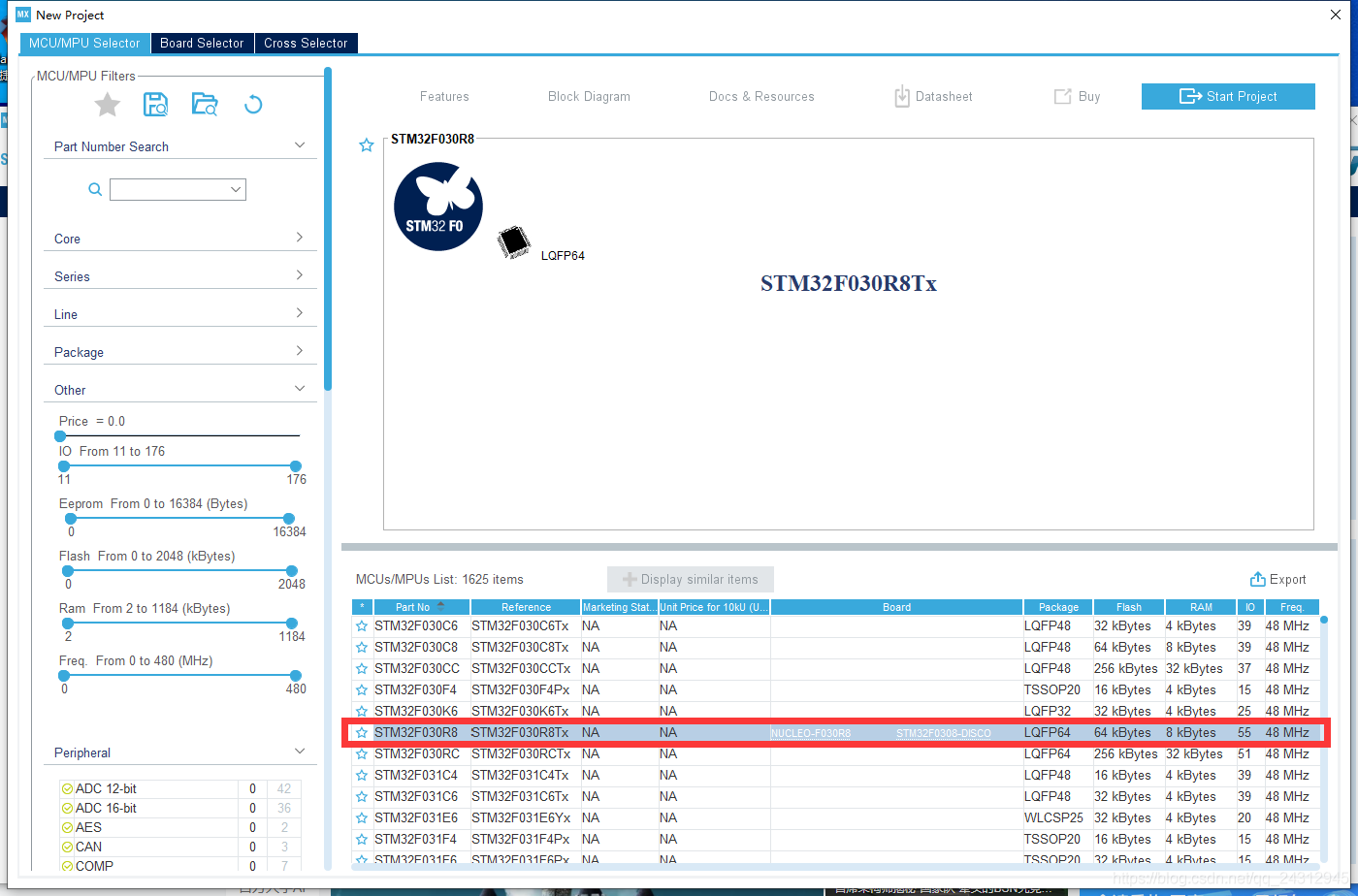
配置时钟源
HSE与LSE分别为外部高速时钟和低速时钟,在本文中使用内置的时钟源,故都选择Disable选项,如下所示: 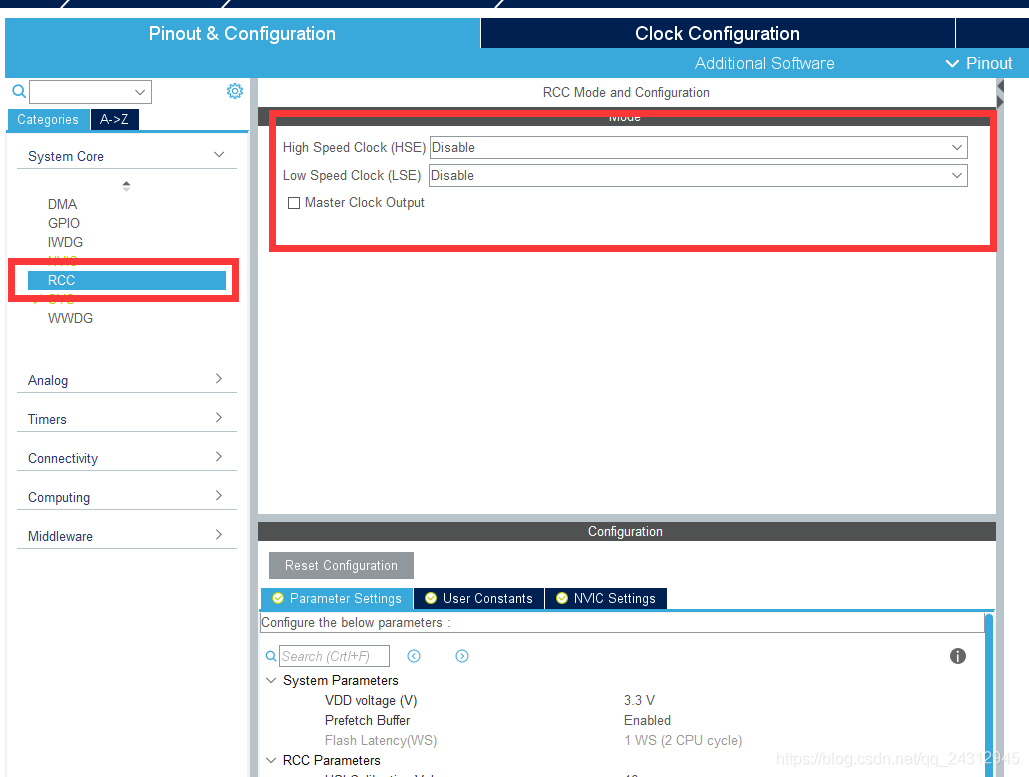
配置时钟树
STM32F0的最高主频到48M,所以配置48即可: 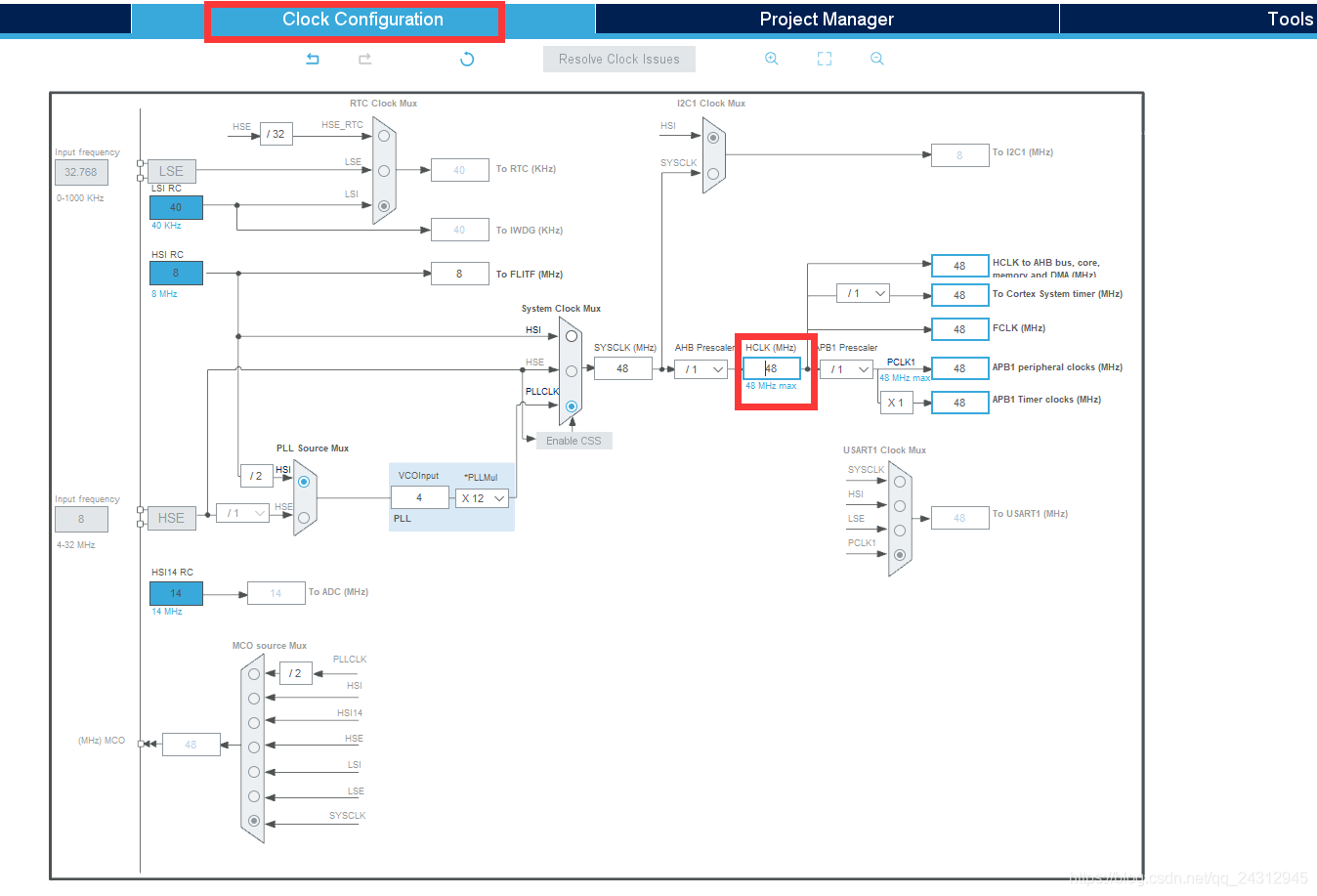
SPI配置
本次实验使用的SPI与Flash通信,配置如下。 SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,它们是MISO(主设备数据输入)、MOSI(主设备数据输出)、SCLK(时钟)、CS(片选)。 (1)MISO– Master Input Slave Output,主设备数据输入,从设备数据输出; (2)MOSI– Master Output Slave Input,主设备数据输出,从设备数据输入; (3)SCLK – Serial Clock,时钟信号,由主设备产生; (4)CS – Chip Select,从设备使能信号,由主设备控制。
接线方式
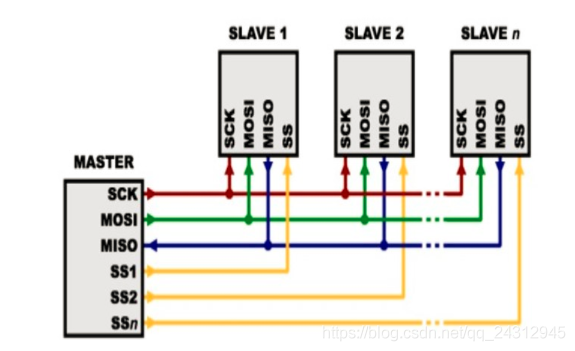
负责通讯的3根线了。通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。这就是SCLK时钟线存在的原因,由SCLK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。数据输出通过 SDO线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。完成一位数据传输,输入也使用同样原理。因此,至少需要8次时钟信号的改变(上沿和下沿为一次),才能完成8位数据的传输。 时钟信号线SCLK只能由主设备控制,从设备不能控制。同样,在一个基于SPI的设备中,至少有一个主设备。这样的传输方式有一个优点,在数据位的传输过程中可以暂停,也就是时钟的周期可以为不等宽,因为时钟线由主设备控制,当没有时钟跳变时,从设备不采集或传送数据。SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。芯片集成的SPI串行同步时钟极性和相位可以通过寄存器配置,IO模拟的SPI串行同步时钟需要根据从设备支持的时钟极性和相位来通讯。 最后,SPI接口的一个缺点:没有指定的流控制,没有应答机制确认是否接收到数据。 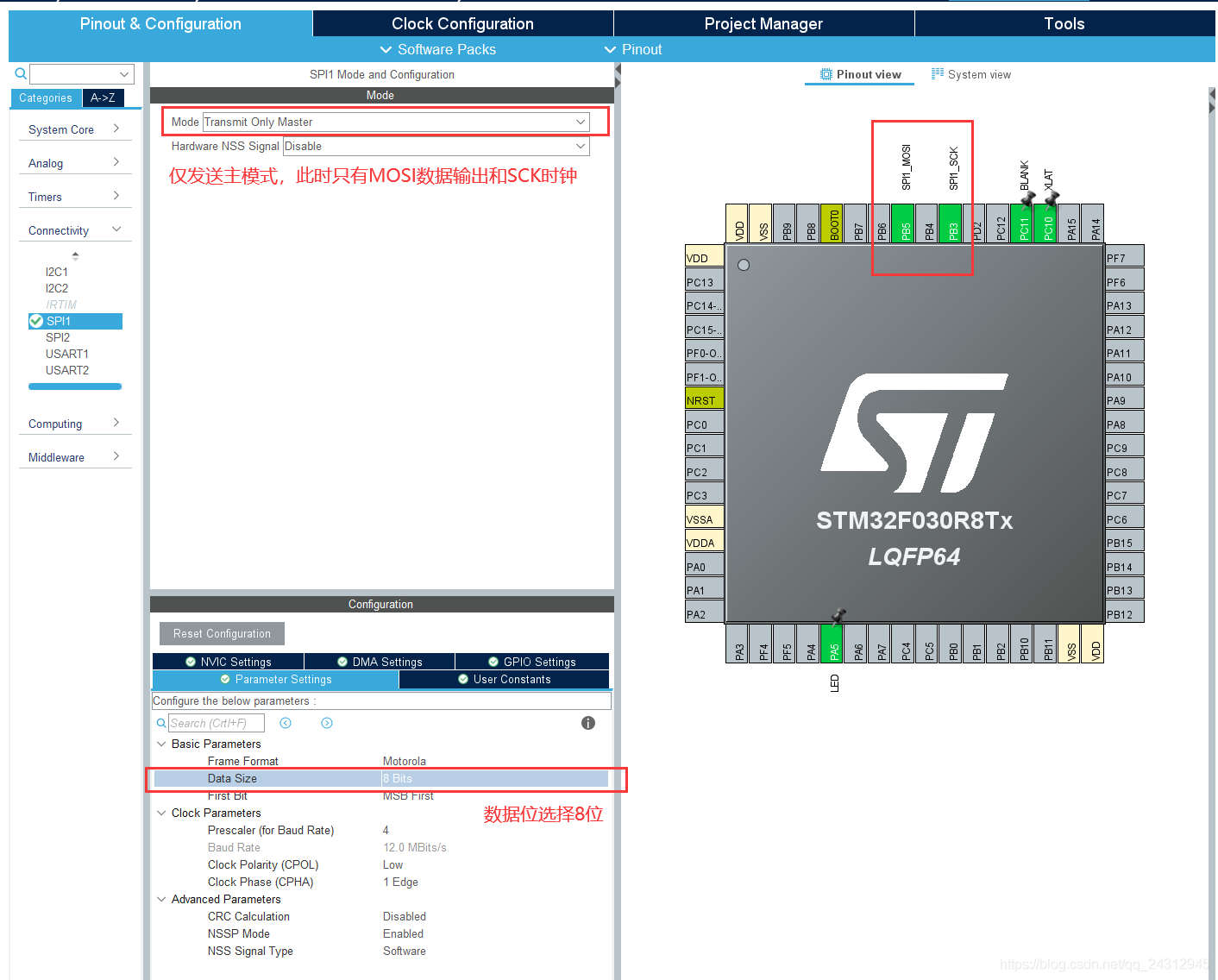 其中,CS是从芯片是否被主芯片选中的控制信号,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),主芯片对此从芯片的操作才有效。这就使在同一条总线上连接多个SPI设备成为可能。 TLC5947需要配置2个CS线,分别是BLANK和LAT。
其中,CS是从芯片是否被主芯片选中的控制信号,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),主芯片对此从芯片的操作才有效。这就使在同一条总线上连接多个SPI设备成为可能。 TLC5947需要配置2个CS线,分别是BLANK和LAT。 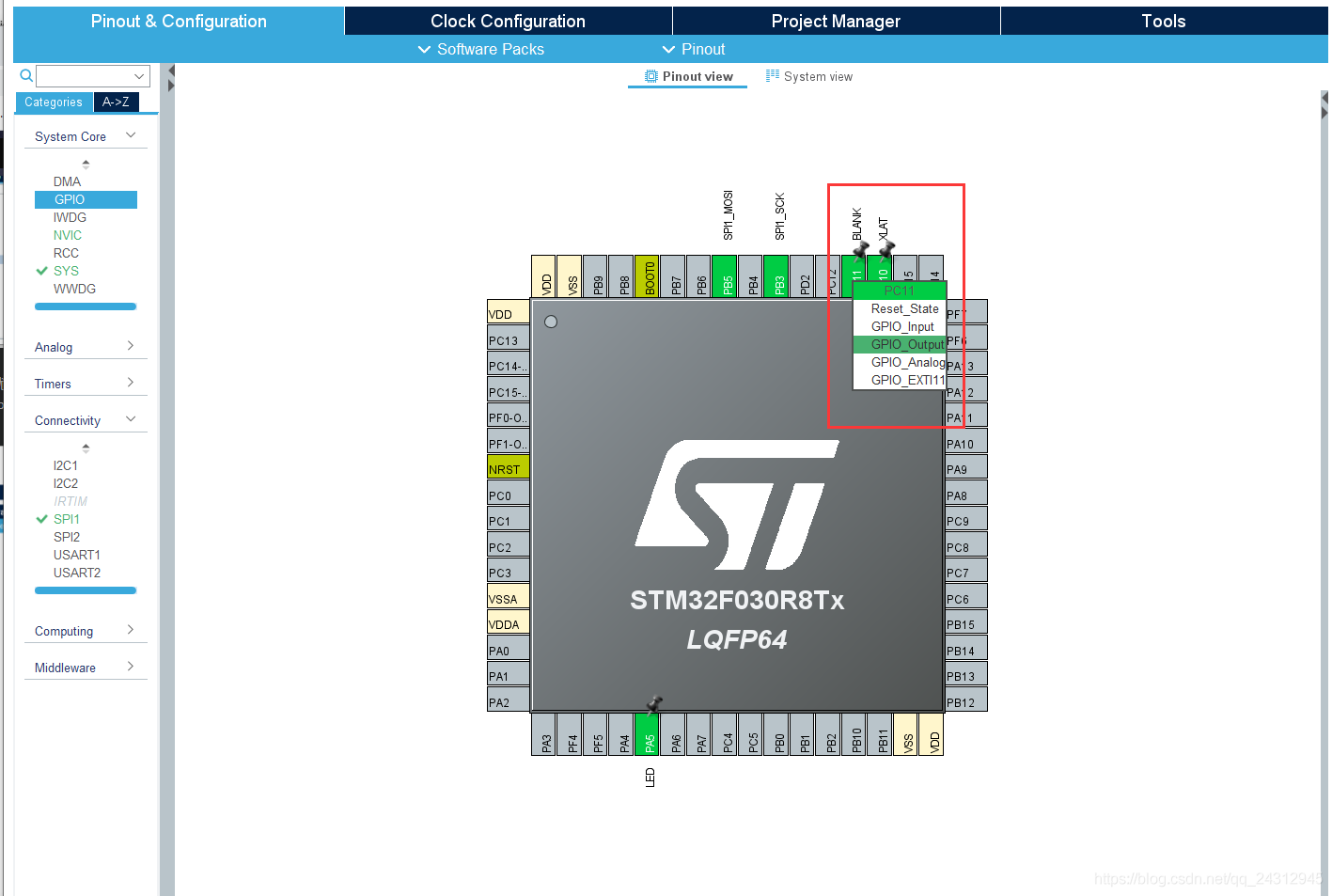
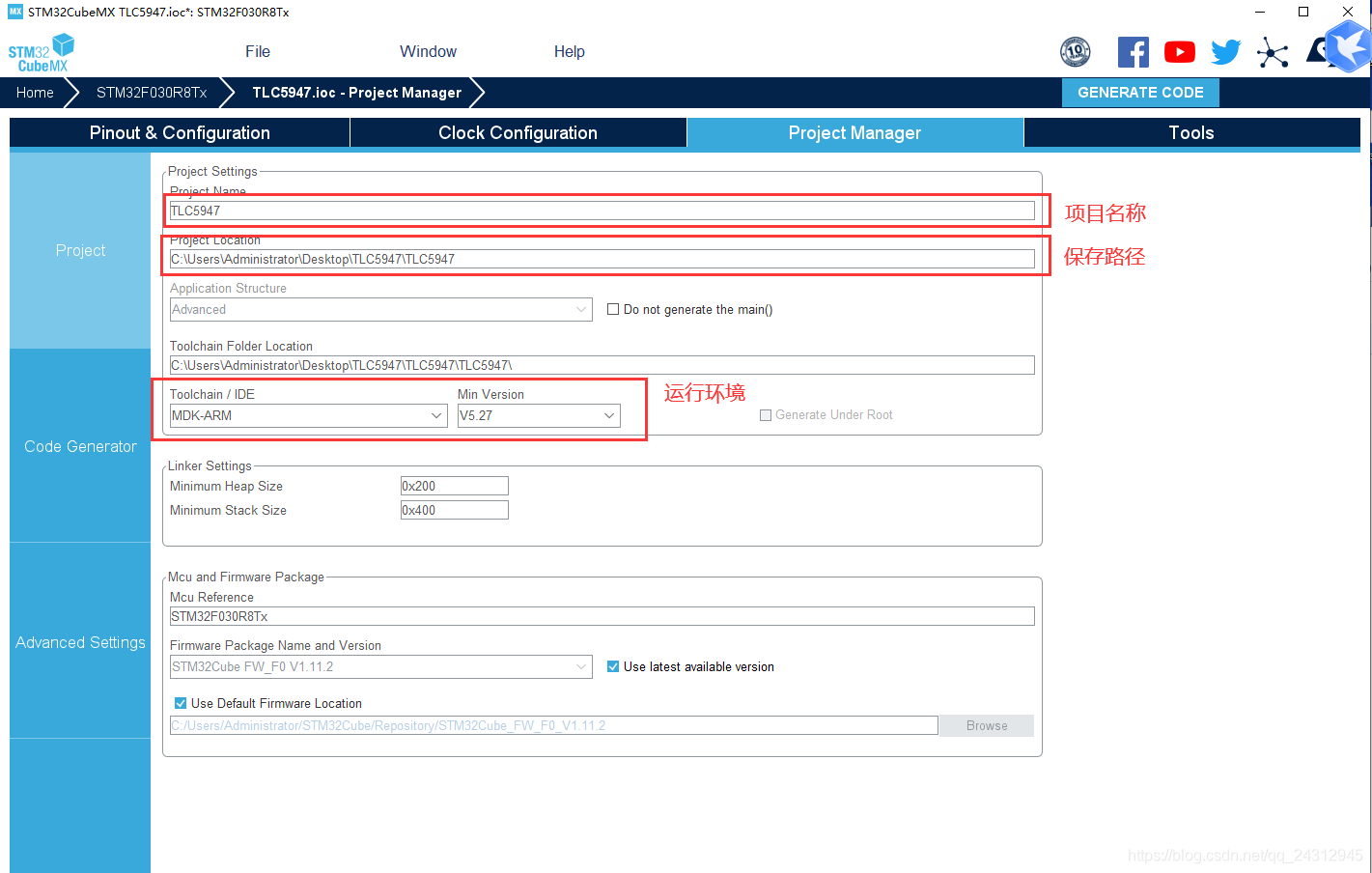
生成工程设置
注意在生产工程设置中不能出现中文,不然会报错。
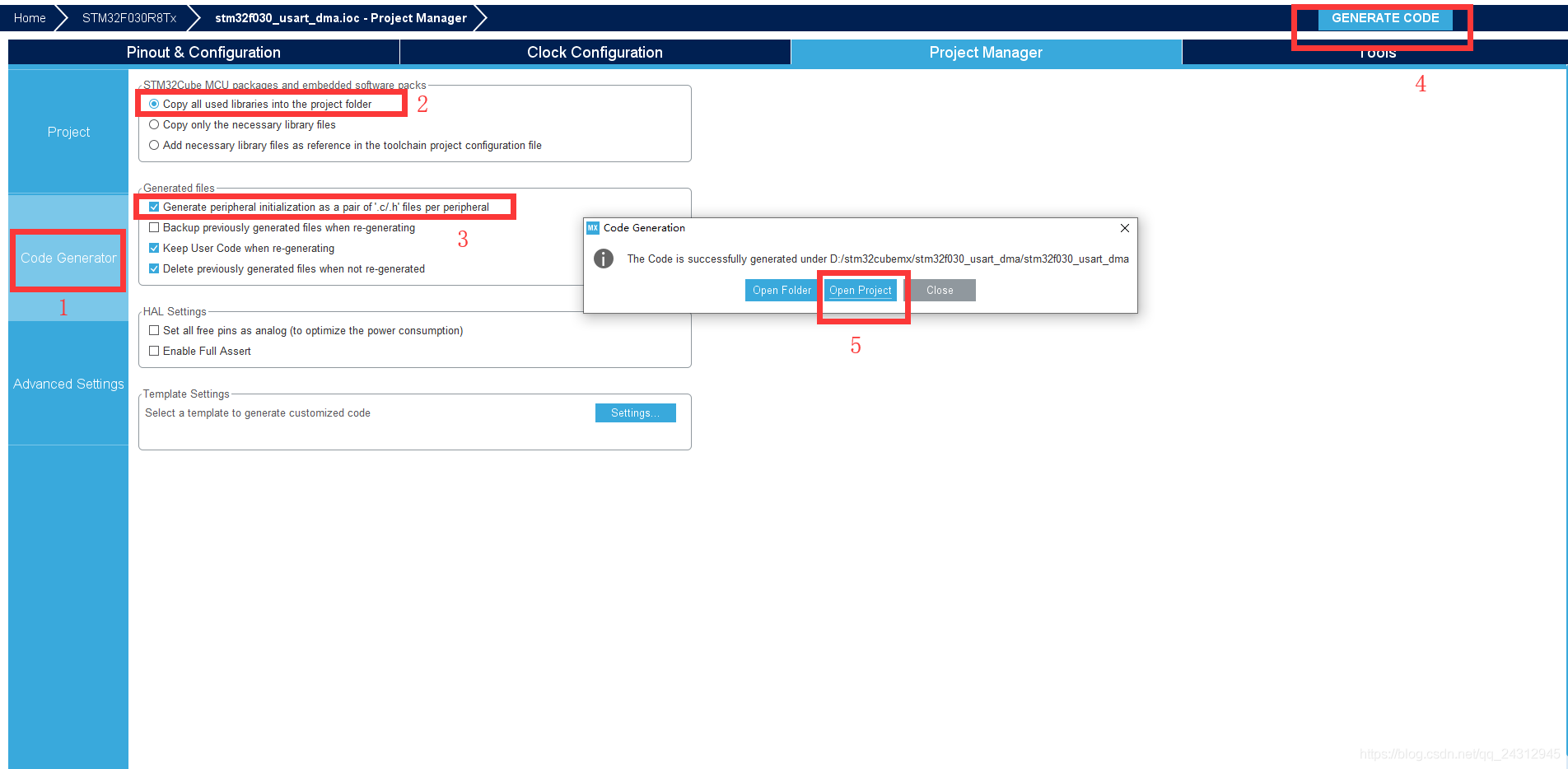
生成代码
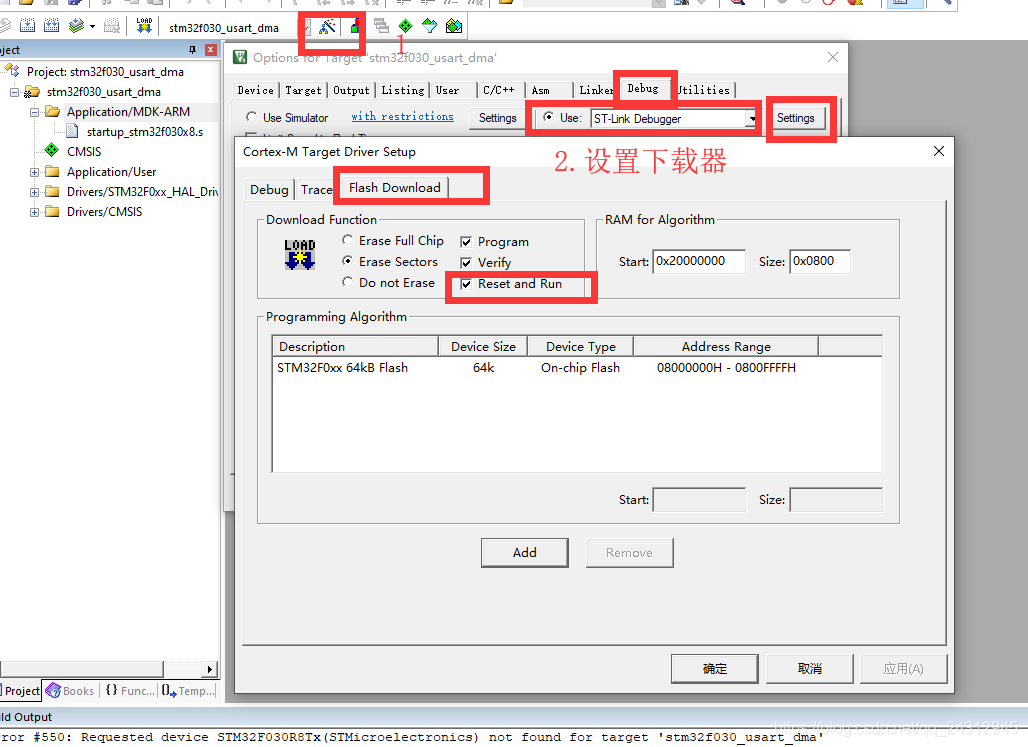
配置keil
TLC5947的原理及应用
BLANK:所有恒流输出关闭。 当blank 接高时 ,所有恒流输出(输出0通过out23)强制关闭,脉宽调制PWM定时控制器初始化,灰度计数器重置为0。 当blank接低时 ,所有恒流输出由灰度脉宽调制定时控制器控制。 GND:负极 IREF:设置恒定电流值,设置T0到T23引脚输出的电流值。通过在IREF和GND之间连接一个外部电阻所需要的值。 SCLK:串行数据移位时钟。 SIN:灰度数据的串行输入。 SOUT:串行数据输出。 VCC:供电 XLAT:灰度数据转换。灰度移位寄存器中的数据以从低到高的方式移动到灰度数据锁存器,在XLAT引脚上转换。当XLAT.上升沿被输入时,所有恒流输出被强制关闭,直到下一个灰度显示周期。灰度计数器不会随着XLAT边沿的上升而重置为0。 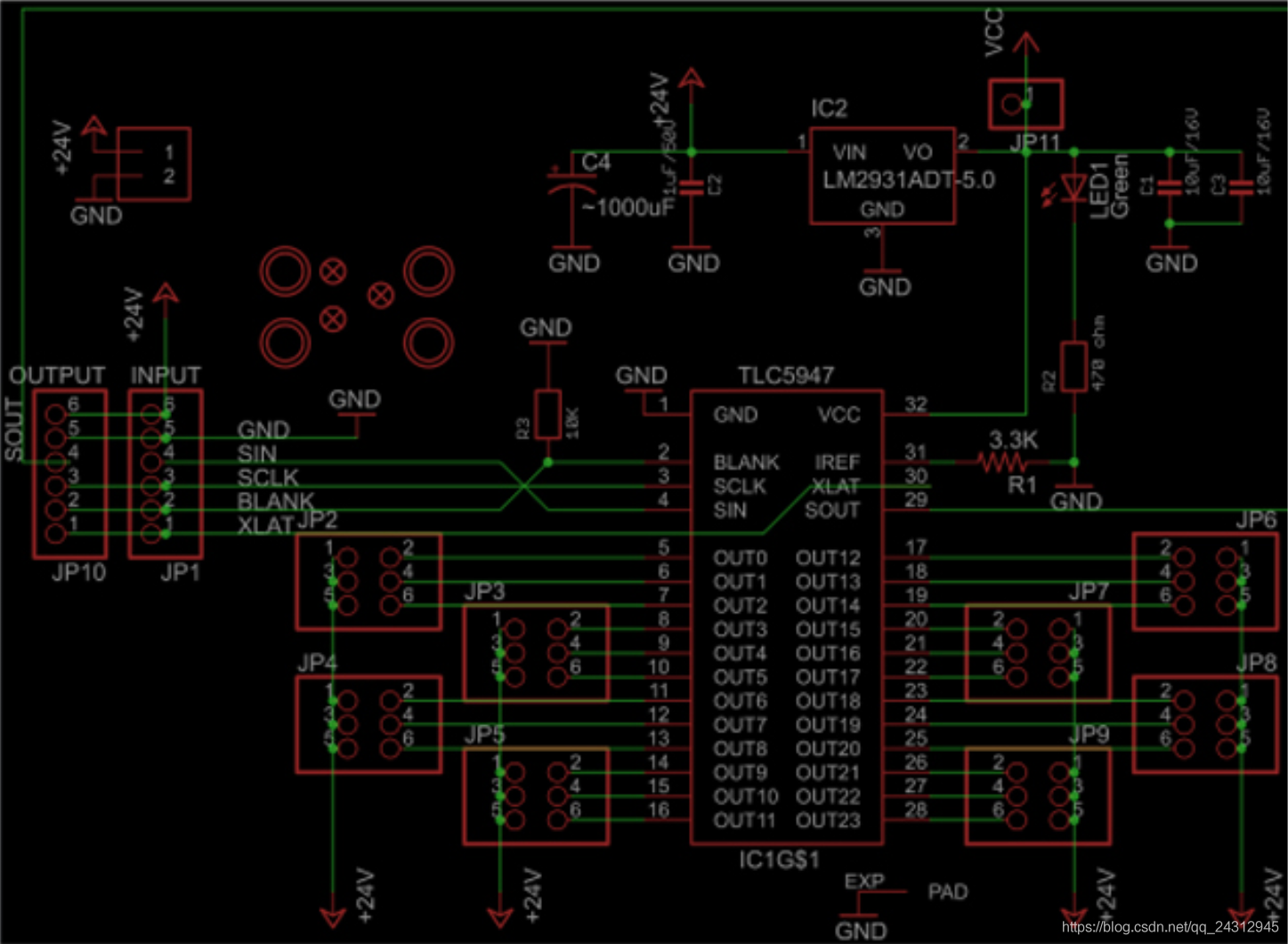 由于芯片为开漏输出,故接线如下所示。
由于芯片为开漏输出,故接线如下所示。 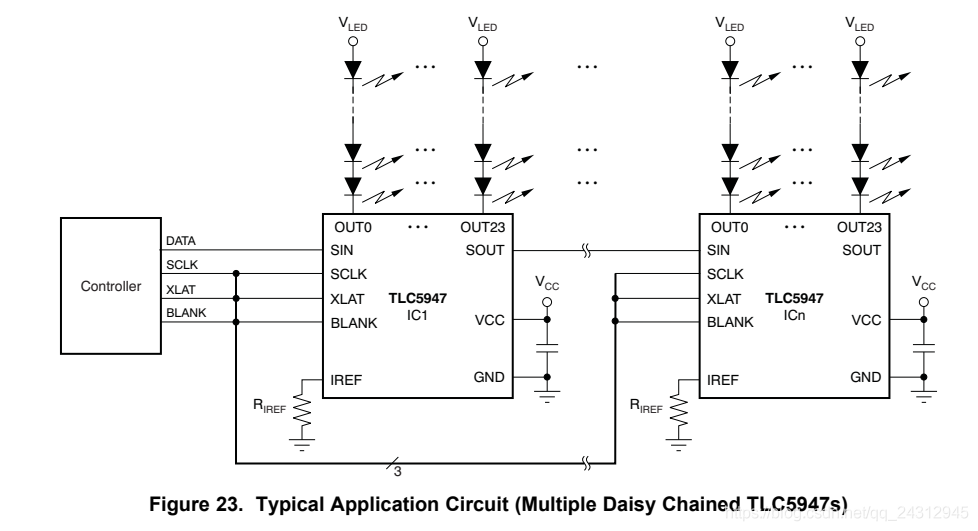 时序图如下所示。
时序图如下所示。 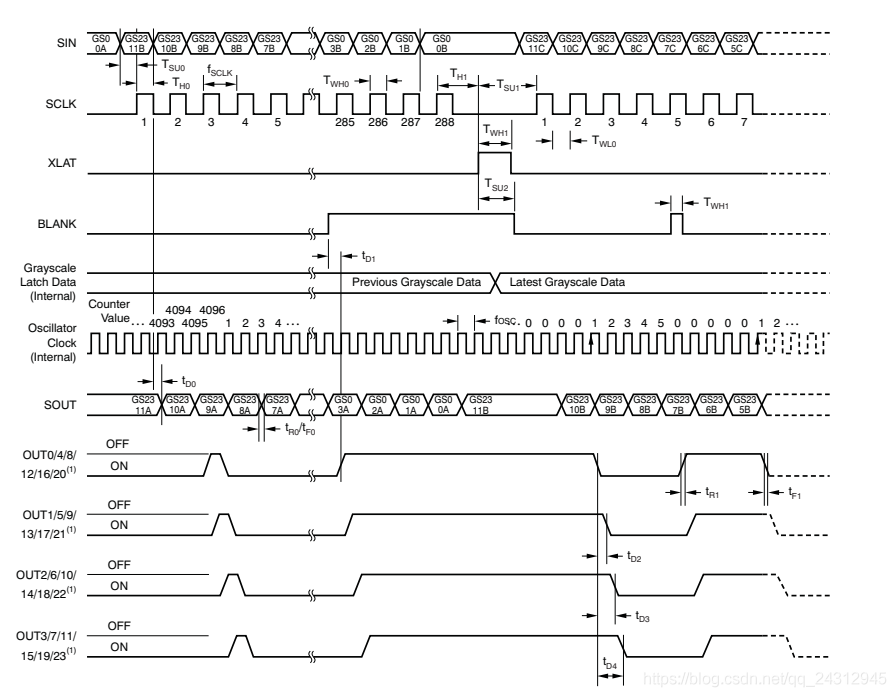
代码
本例程向通道0中写入呼吸灯程序通道1输出12.5%,通道2输出25%,通道3-通道22输出50%,通道23输出75%,例程代码如下。 变量定义。
/* USER CODE BEGIN PV */
uint16_t leds[24]=
{
512,512,1024,2048,2048,2048,
2048,2048,2048,2048,2048,2048,
2048,2048,2048,2048,2048,2048,
2048,2048,3000,2048,2048,3072
};
void TLC_Update(void);
void TLC_Write(uint8_t data);
int i=0;
int flag=0;
/* USER CODE END PV */
SPI发送函数定义。
/* USER CODE BEGIN 4 */
void TLC_Update(void)
{
HAL_GPIO_WritePin(BLANK_GPIO_Port, BLANK_Pin, GPIO_PIN_SET);
// HAL_Delay(1);
for (int8_t i = 23; i >= 0; i -= 2)
{
uint8_t send1 = 0;
uint8_t send = leds[i] >> 4;
TLC_Write(send);
send = (leds[i] & 0x000F);
send <<= 4;
send1 = (leds[i-1]) >> 8;
send |= send1;
TLC_Write(send);
send = leds[i-1];
TLC_Write(send);
}
HAL_GPIO_WritePin(XLAT_GPIO_Port, XLAT_Pin, GPIO_PIN_SET);
// HAL_Delay(1);
HAL_GPIO_WritePin(XLAT_GPIO_Port, XLAT_Pin, GPIO_PIN_RESET);
// HAL_Delay(1);
HAL_GPIO_WritePin(BLANK_GPIO_Port, BLANK_Pin, GPIO_PIN_RESET);
return ;
}
void TLC_Write(uint8_t data)
{
HAL_SPI_Transmit(&hspi1, &data, sizeof(data), 0);
while(HAL_SPI_GetState(&hspi1) == HAL_SPI_STATE_RESET);
return ;
}
/* USER CODE END 4 */
主程序。
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(flag==0)//灯渐亮
i+=5;
else//灯渐灭
i-=5;
if(flag==0&&i==4095)//灯最亮
{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET);
flag=1;
}
if(flag==1&&i==0)//灯最暗
{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_RESET);
flag=0;
}
leds[0]=i;//更新通道0的PWM
TLC_Update();//更新PWM
HAL_Delay(1);
}
/* USER CODE END 3 */
}
审核编辑:汤梓红
-
 记帖MCU
2022-11-18
0 回复 举报交流ⓆU_N:6_15061293 收起回复
记帖MCU
2022-11-18
0 回复 举报交流ⓆU_N:6_15061293 收起回复
- 相关推荐
- 热点推荐
- PWM
- SPI
- stm32cubemx
-
STM32CubeMx外部中断基本使用方法2023-05-31 6019
-
STM32CubeMx入门教程(4):PWM应用2023-07-11 4348
-
STM32CUBEMX(14)--SPI,TLC5947外部PWM移植2024-09-30 13703
-
STM32CubeMX系列教程新鲜出炉2016-05-04 5404
-
微雪电子STM32CubeMX教程 (转载)2016-08-25 8497
-
如何使用HSPI驱动TLC5947?2023-02-24 534
-
TLC5947 pdf datasheet (24-Chan2008-08-08 2129
-
stm32cubemx教程2015-11-02 1845
-
TI 24通道LED驱动TLC5947的性能及展示板的介绍2019-05-07 8143
-
STM32CubeMX生成代码在SW4STM32下移植STemWin(CLion+CubeMX)2021-12-04 1642
-
STM32CubeMX 窗口及工具介绍2021-12-14 1240
-
使用STM32CubeMX对F407ZGT6移植LWIP(全网最全)2021-12-27 3067
-
STM32CUBEMX(1)--PWM2022-11-14 4722
-
Keil STM32CubeMX资料包2023-03-27 944
-
TLC5947 技术文档总结2025-09-03 1041
全部0条评论

快来发表一下你的评论吧 !
