

什么是行人航位推算 (PDR)?
描述
您有没有过这样的经历:您正跟着手机的 GPS 在街上行走,突然间 GPS 系统无法确定您的位置?也许此时您刚好在城市中的一排摩天大楼附近,或是在树林里一条人迹罕至的小路上。无论如何,此时周边环境遮挡了您的 GPS 信号。行人航位推算技术就是专门针对此类情景的一项有用技术。
航位推算就是指在没有任何外部参考的情况下,利用已知起始位置,结合随着时间的推移而估算的移动速度和前进方向,来推定未来到达位置的过程。将这个概念延伸到人类运动领域,特别是行走或跑步的情况,就是行人航位推算。
行人航位推算 (PDR) 是怎样运作的?
行人航位推算使用惯性感应(加速度计、陀螺仪,有时也会使用磁力计)来估计速度和方向。步行的基本模型包括步数、步长和方向。如果您知道步长和步数,就可以推断出距离。再加上方向,就能得到一个完整的航位推算输出结果。
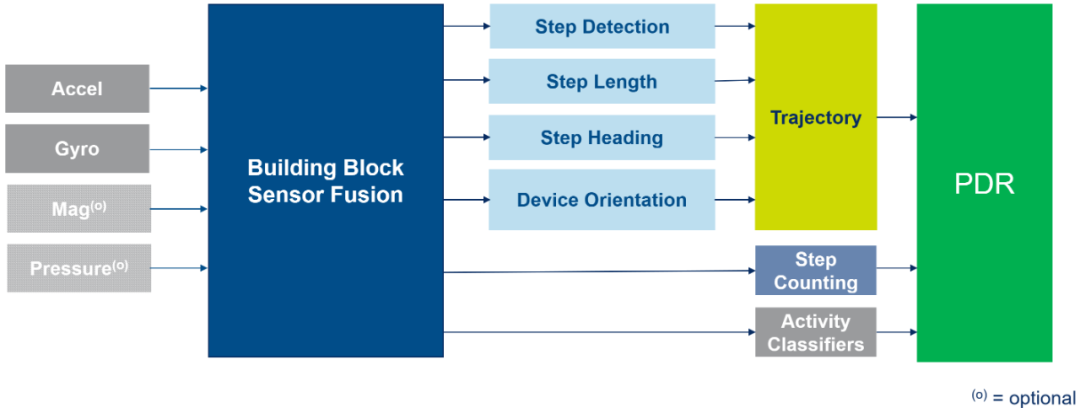
通过融合多个传感器输出,PDR/行人航位推算算法即可计算出基本构成元素。这包括步数检测、步长、步行方向和设备方向(您是将手机握在手里,还是放在口袋里?)这些基本构成元素拼凑在一起,就能确定总体轨迹。与其他有关计步和活动分类(您在走路、跑步还是静止不动?)的输出结果相结合,就能了解您已经行进的距离。
PDR 有哪些局限性,解决方案是什么
在 GPS 不可靠的情况下了解自己的位置,这是行人航位推算的主要好处之一。而且,由于它基于惯性感应,因此不必依赖外部测量源(如卫星)。但如果 PDR 如此出色,为什么还要费心费力去使用 GPS 呢?
我们得承认,PDR 有其自身的局限性。不依赖外部资源是一把双刃剑。这意味着它不会迷失方向,但也意味着它无法自行纠错。它可以做出估计(也就是航位推算的“推算”部分)。使用 GPS,在信号较好时,系统可以随着时间的推移校正定位。
要在短期内确定方向,IMU 的陀螺仪角位置信息比加速度计或磁力计更可靠。它能在短期内输出一致、可用的数据。磁力计或加速度计也可以确定方向,但需要更长时间、更稳定的测量。同样,航位推算在短期内也很有用。GPS 则可以在更长的时间内提供稳定的位置测量。主要优点是测量能力的补充。PDR 算法是可靠定位解决方案中不可或缺的组成部分。
实时定位系统 (RTLS) 和其他优点/缺点
实时定位系统 (RTLS) 是另一种用于确定位置的系统。GPS 在室外环境中非常有用,RTLS 在建筑物或其他密闭空间内有着类似的实用价值。比如追踪商品在库房里的位置、顾客在购物中心内的位置或患者在医院中的位置,这都是 RTLS 非常有用并且 GPS 无法可靠覆盖的应用场景。
实时定位系统最常用的技术包括超宽带、蓝牙和 Wi-Fi。每种技术的信号各有不同,但基本原理保持不变。选定信号类型都有许多固定参考点。随后用户携带一个标签(例如小型收发器或手机),该标签可以在这些参考点之间来回发送信号,以便实现定位。
大多数 RTLS 的工作原理是确定相对于标签的信号强度,随后在至少有 3 个参考点的情况下即可确定位置。但有些技术不需要多个参考点或锚点。超宽带可使用单个锚点确定位置,无需进行三角定位。蓝牙可以确定到达角和离开角。如果使用更多的参考点,系统的准确性将进一步提高。这些系统相对一致且具有确定性;但与惯性系统相比,它们的功耗也很高。而在这方面,PDR 再度显现出显著优势。如果 RTLS 与 PDR 配合,打造成一种更为全面的解决方案,它就能降低自身系统更新的频率,并依靠 PDR 来“填补空白”。
省电是一项非常重要的优势,但 PDR 对 RTLS 或 GPS 系统还有其他好处。为完整起见,我在下面再次给出优势列表,不过这次汇总的是在任何基于位置的系统中添加 PDR 的好处:
-
更低的功耗:降低 RTLS/GPS 更新的频率,并依靠功耗较低的 PDR 算法,从而为标签/设备省电。
-
填补信号覆盖空白:如果系统找不到标签(原因可能是存在遮挡、延迟问题、超出范围)设备无法连接到卫星,则可以使用 PDR 估算值来填补缺失的数据。
-
更高的系统精度:RTLS 和 GPS 系统专门关注定位,但不会直接跟踪方向或速度。与其他系统相比,行人航位推算可通过更高的频率提供更高级的粒度层,从而产生更平滑的路径。例如,在条件最优的情况下,GPS 的精度为 3 米。
-
降低安装成本:使用 PDR 解决方案时,RTLS 工作所需的信标更少。
切记,PDR 确实是一项出色的技术,但最适合作为各种基于位置的技术的补充。它可以单独使用,但是如果没有任何真实信号为其提供支持,随着时间的推移,它将不再可靠。但如果在短期内使用,它可以为其他系统增添不少好处。CEVA 深耕传感器融合领域已有 20 多年,在我们原本就高度精确的惯性传感器融合的基础上,开发了强大的 PDR 算法。
欢迎扫描下方二维码联系我们,进一步了解我们的算法并观看演示

原文标题:什么是行人航位推算 (PDR)?
文章出处:【微信公众号:CEVA】欢迎添加关注!文章转载请注明出处。
-
如何进一步提高航位推算精度2022-10-09 1955
-
航位推算,实现高精度车载导航定位2022-09-28 4111
-
双频GPS能取代航位推算吗2022-04-17 2157
-
浅述行人航位推算的室内定位技术综述2021-05-05 4180
-
基于MEMS传感器的行人航位推算(PDR)解决方案2018-03-16 14293
-
基于MEMS传感器的行人航位推算解决方案2018-03-15 6222
-
基于STM32的步行者航位推算装置设计2017-12-11 3202
-
基于MEMS传感器的PDR解决方案分析2017-11-22 1303
-
基于MEMS传感器的行人航位推算(PDR)解决方案2016-10-17 6253
-
缩短积分时间可以提高航位推算导航系统的精度2016-01-04 697
-
捷联惯导_航位推算组合导航算法研究2013-08-19 1295
全部0条评论

快来发表一下你的评论吧 !
