

 瑞萨e2studio(12)----USRT通过定时器中断方式接收不定长数据
瑞萨e2studio(12)----USRT通过定时器中断方式接收不定长数据
描述
概述
本篇文章主要介绍如何使用e2studio对瑞萨单片机进行USRT通过定时器中断方式接收不定长数据。 需要样片的可以加qun申请:6_15061293 。
完整代码下载
https://download.csdn.net/download/qq_24312945/84995168
样品申请
https://www.wjx.top/vm/wBbmSFp.aspx#
硬件准备
首先需要准备一个开发板,这里我准备的是芯片型号R7FAM2AD3CFP的开发板: 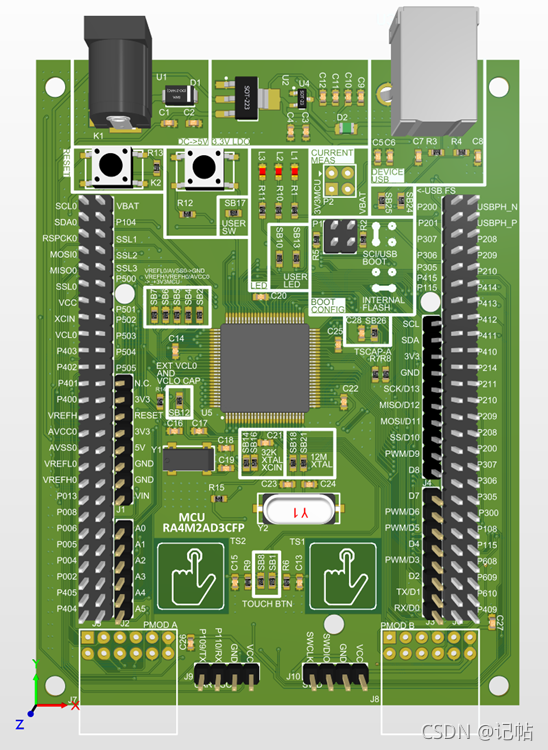
样品申请
https://www.wjx.top/vm/wBbmSFp.aspx#
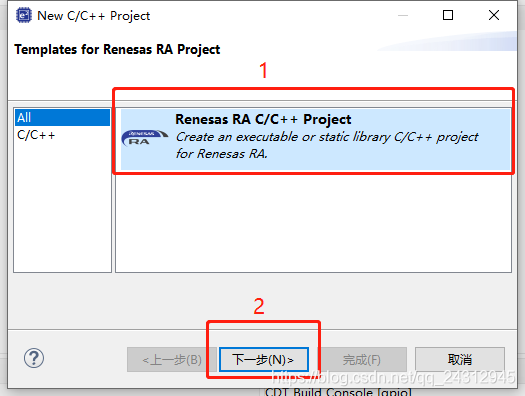
新建工程

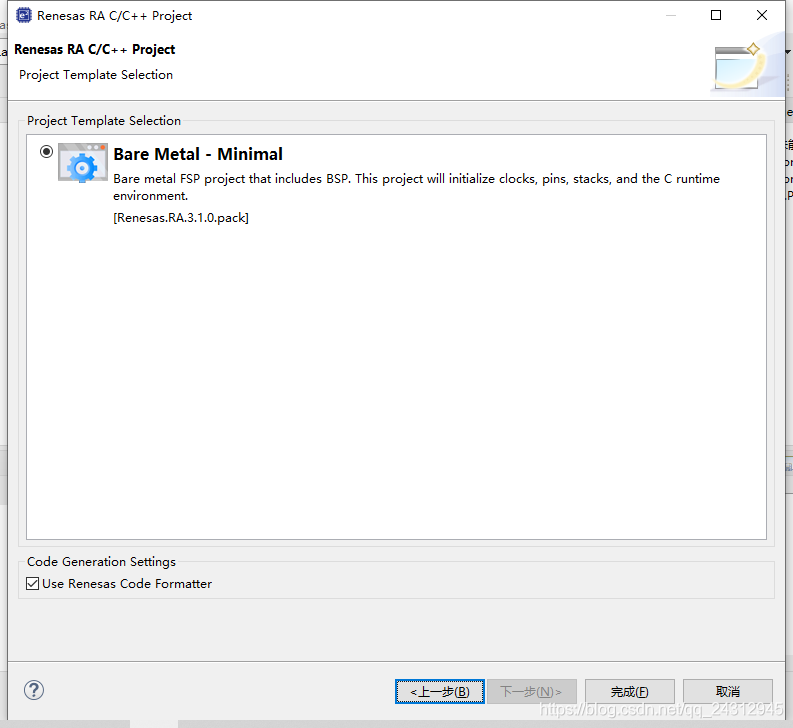
工程模板
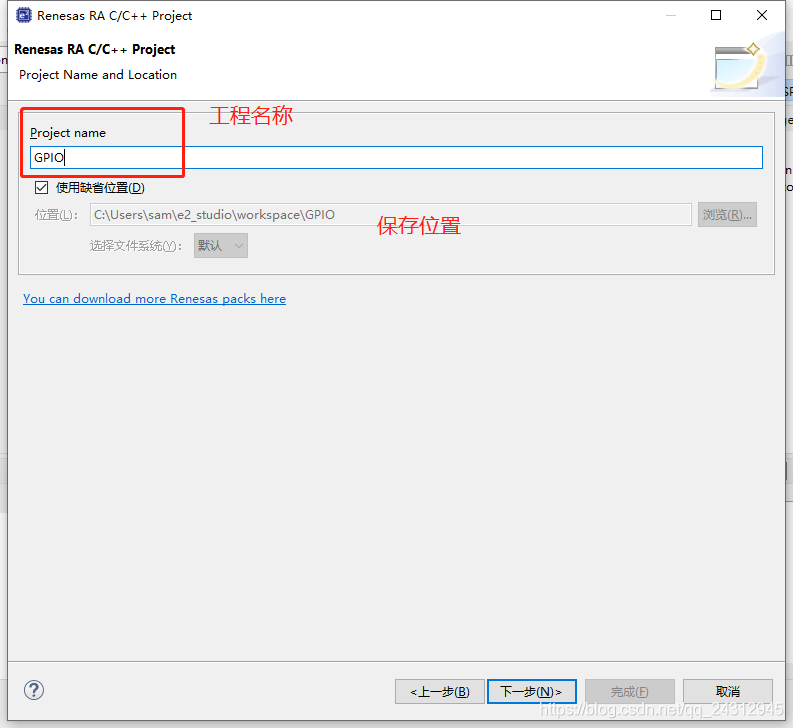
保存工程路径
芯片配置
本文中使用R7FA4M2AD3CFP来进行演示。 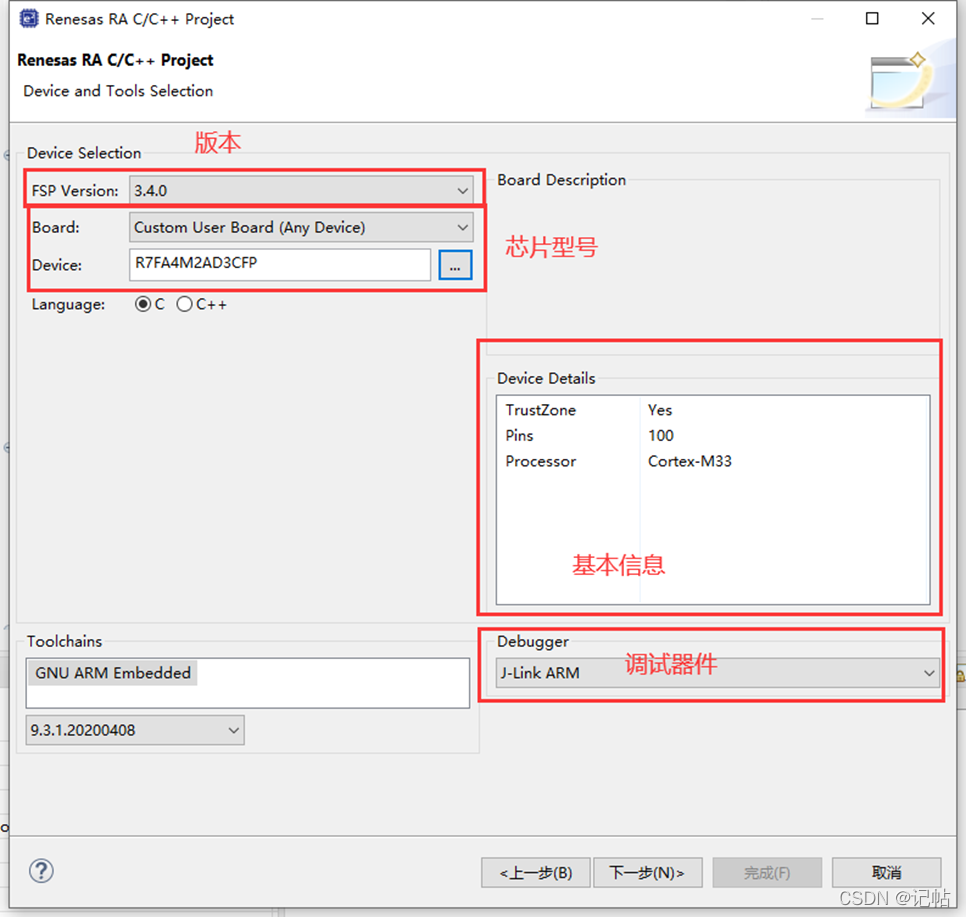
工程模板选择
时钟设置
开发板上的外部高速晶振为12M,需要修改XTAL为12M. 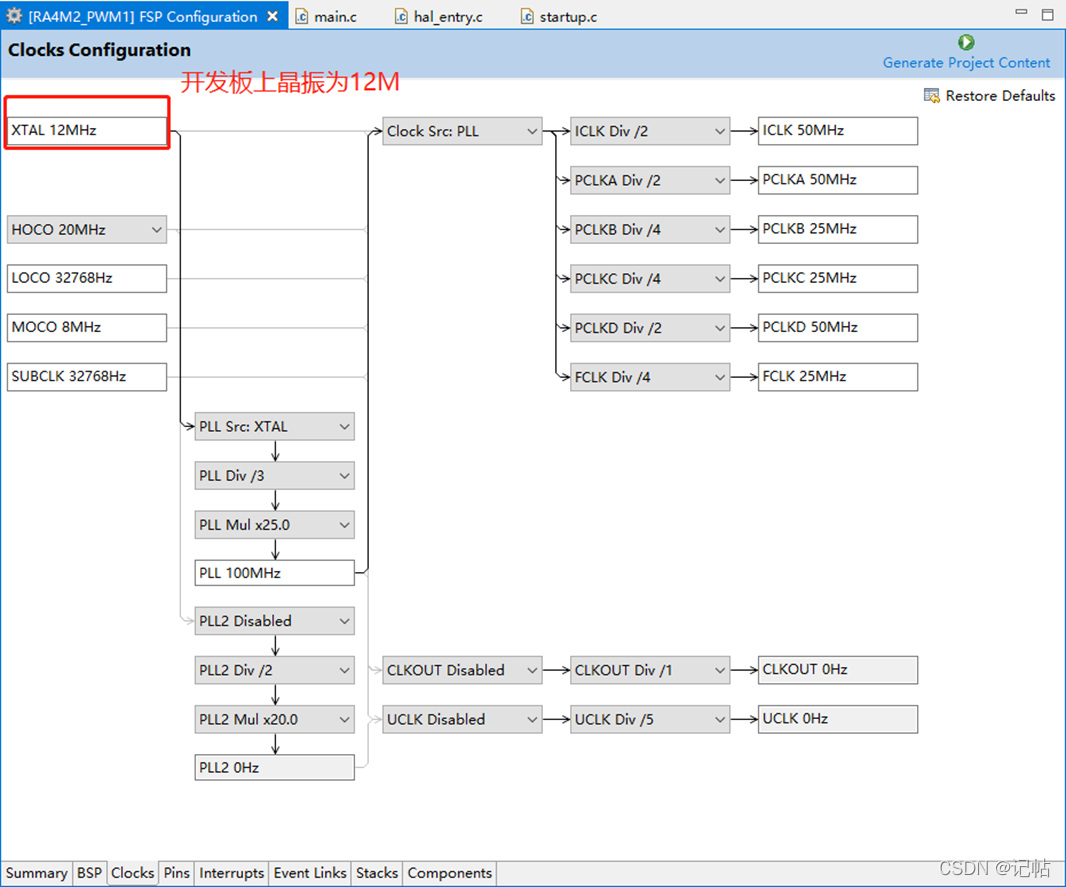
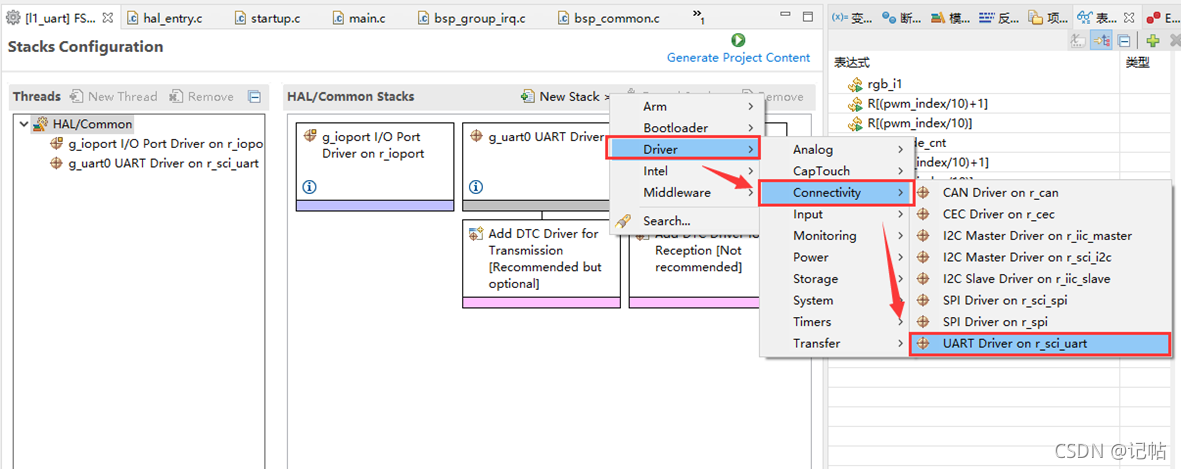
UART配置
点击Stacks->New Stack->Driver->Connectivity -> UART Driver on r_sci_uart。
UART属性配置
由于开发板的typc-c接口所接的是串口9,故配置为通道9。 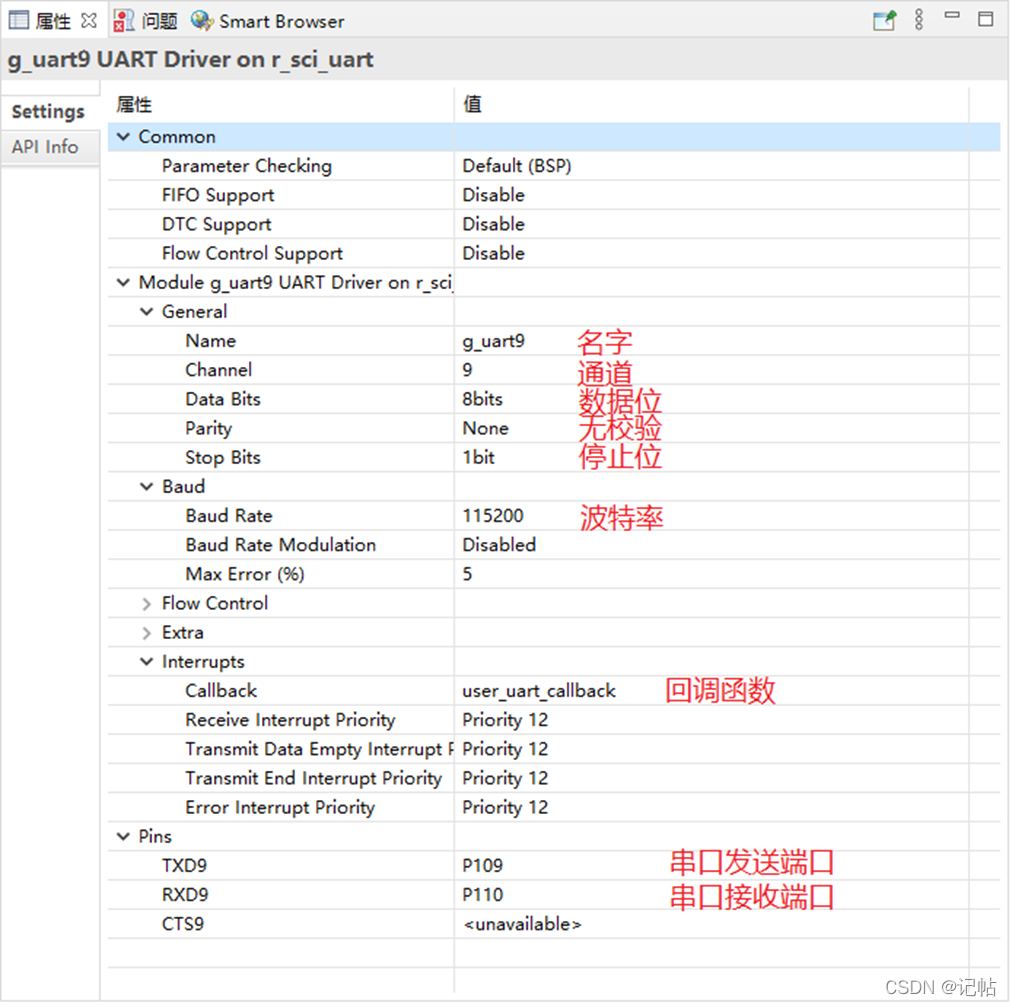
回调函数user_uart_callback ()
发送完毕可以用UART_EVENT_TX_COMPLETE进行判断。 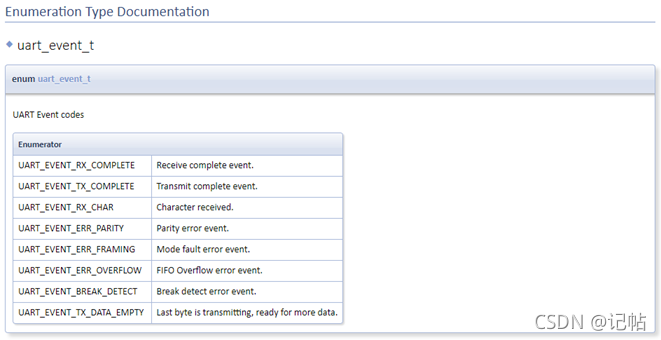
volatile bool uart_send_complete_flag = false;
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
}
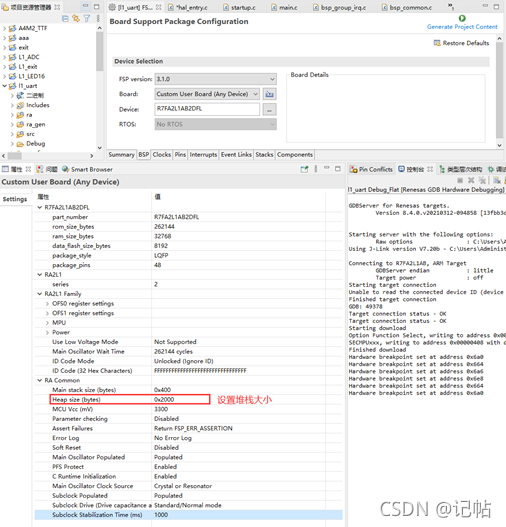
设置e2studio堆栈
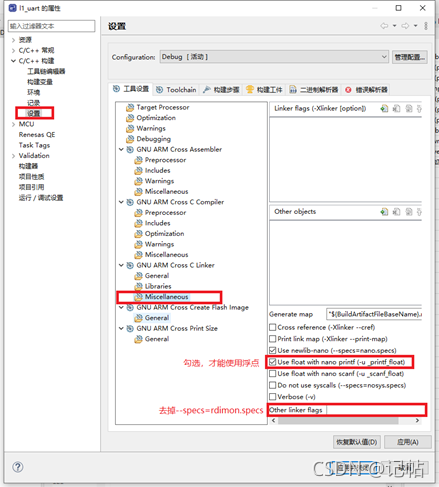
e2studio的重定向printf设置
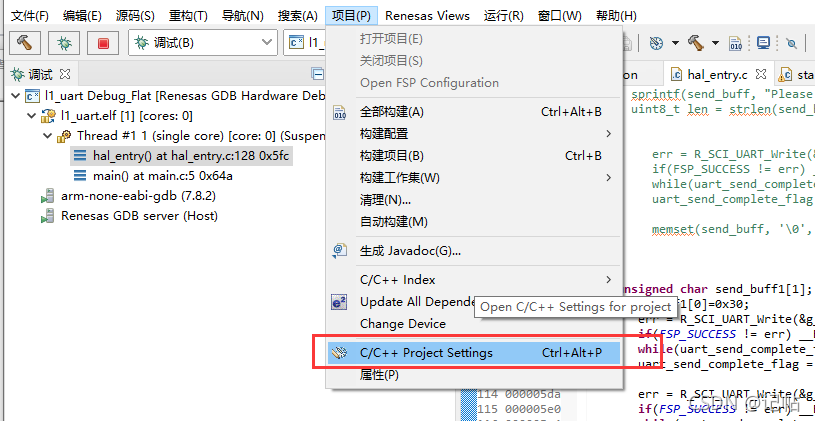 C++ 构建->设置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
C++ 构建->设置->GNU ARM Cross C Linker->Miscellaneous去掉Other linker flags中的 “--specs=rdimon.specs”
printf输出重定向到串口
打印最常用的方法是printf,所以要解决的问题是将printf的输出重定向到串口,然后通过串口将数据发送出去。 注意一定要加上头文件#include
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
err = R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t *)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
while(uart_send_complete_flag == false){}
uart_send_complete_flag = false;
return ch;
}
int _write(int fd,char *pBuffer,int size)
{
for(int i=0;ireturn size;
}
回调函数user_uart_callback ()
设置接受到0xff则输出已经输入的数据。 若接收到新的数据,使用R_GPT_Reset进行充值定时器计数。
volatile bool uart_send_complete_flag = false;
uint8_t RxBuff[1]; //进入中断接收数据的数组
uint8_t DataBuff[5000]; //保存接收到的数据的数组
int RxLine=0; //接收到的数据长度
int Rx_flag=0; //接受到数据标志
int Rx_flag_finish=0; //接受完成或者时间溢出
void user_uart_callback (uart_callback_args_t * p_args)
{
if(p_args->event == UART_EVENT_TX_COMPLETE)
{
uart_send_complete_flag = true;
}
if(p_args->event == UART_EVENT_RX_CHAR)
{
RxBuff[0] = p_args->data;
RxLine++; //每接收到一个数据,进入回调数据长度加1
DataBuff[RxLine-1]=RxBuff[0]; //把每次接收到的数据保存到缓存数组
Rx_flag=1;
if(RxBuff[0]==0xff) //接收结束标志位,这个数据可以自定义,根据实际需求,这里只做示例使用,不一定是0xff
{
Rx_flag_finish=1;
}
RxBuff[0]=0;
err = R_GPT_Reset(&g_timer0_ctrl);
assert(FSP_SUCCESS == err);
}
}
printf_usart打印函数
打印已经接受的数据以及其长度。
void printf_usart(void)
{
printf("length=%d
",RxLine);
for(int i=0;iprintf("data:[%d] = 0x%x
",i,DataBuff[i]);
memset(DataBuff,0,sizeof(DataBuff)); //清空缓存数组
//memset()作用:可以方便的清空一个结构类型的变量或数组。
//例句:memset(aTxbuffer,0,sizeof(aTxbuffer)) 用memset清空aTxbuffer。
RxLine=0; //清空接收长度
Rx_flag_finish=0;
Rx_flag = 0;
}
定时器设置
点击Stacks->New Stack->Driver->Timers -> Timers Driver on r_gpt。 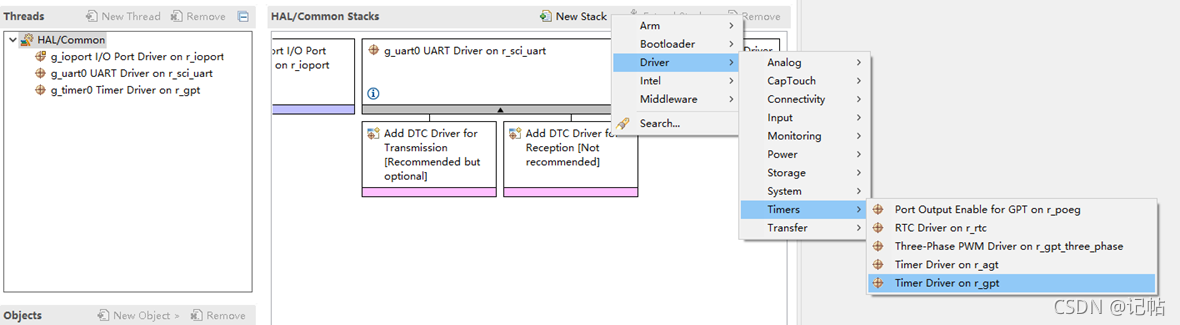 设置500ms无输入则输出已经输入的数据。 频率=时钟源/period,若设置计数时间为500ms一次,频率为2Hz,则period=50M/2=25000000
设置500ms无输入则输出已经输入的数据。 频率=时钟源/period,若设置计数时间为500ms一次,频率为2Hz,则period=50M/2=25000000 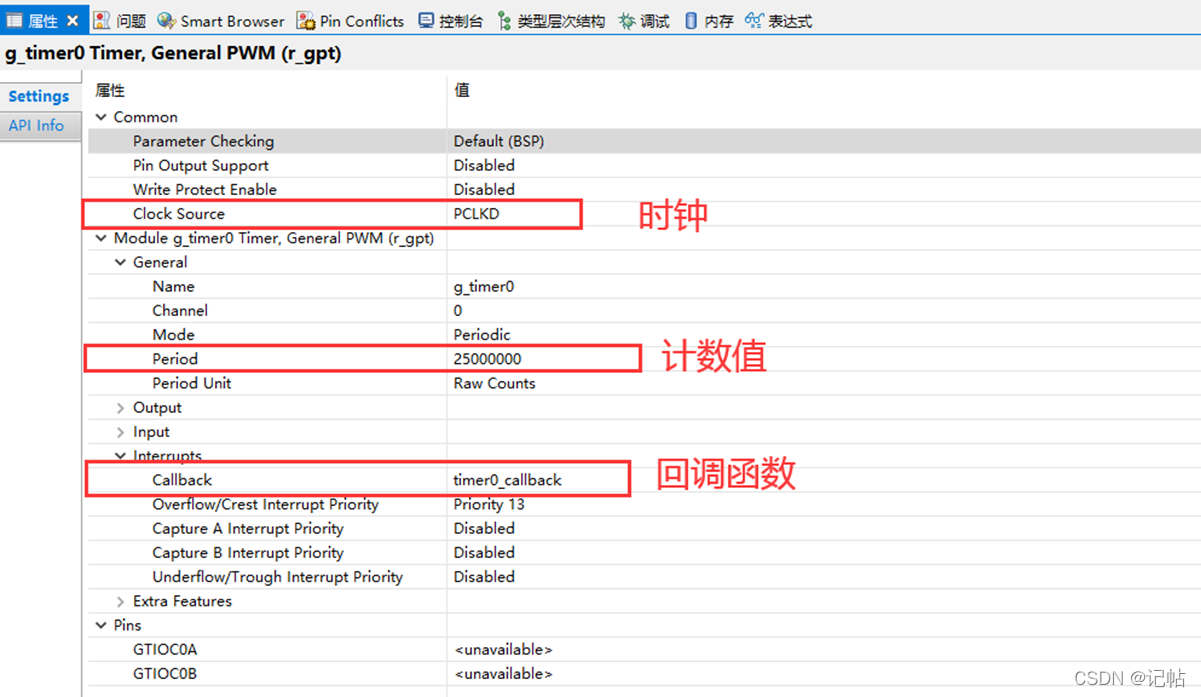
定时器回调函数timer0_callback()
/* Callback function */
void timer0_callback(timer_callback_args_t *p_args)
{
/* TODO: add your own code here */
if (TIMER_EVENT_CYCLE_END == p_args->event)
{
if(Rx_flag==1)
{
printf_usart();
Rx_flag=0;
}
}
}
完整代码
#include "hal_data.h"
#include return size;
}
/* Callback function */
void timer0_callback(timer_callback_args_t *p_args)
{
/* TODO: add your own code here */
if (TIMER_EVENT_CYCLE_END == p_args->event)
{
if(Rx_flag==1)
{
printf_usart();
Rx_flag=0;
}
}
}
void hal_entry(void)
{
/* TODO: add your own code here */
/* Open the transfer instance with initial configuration. */
err = R_SCI_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);
assert(FSP_SUCCESS == err);
/* Initializes the module. */
err = R_GPT_Open(&g_timer0_ctrl, &g_timer0_cfg);
/* Handle any errors. This function should be defined by the user. */
assert(FSP_SUCCESS == err);
/* Start the timer. */
(void) R_GPT_Start(&g_timer0_ctrl);
while(1)
{
R_BSP_SoftwareDelay(1, BSP_DELAY_UNITS_MILLISECONDS); // NOLINT100->160
if(Rx_flag_finish==1)
{
printf_usart();
}
}
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
}
void printf_usart(void)
{
printf("length=%d
",RxLine);
for(int i=0;i"data:[%d] = 0x%x
",i,DataBuff[i]);
memset(DataBuff,0,sizeof(DataBuff)); //清空缓存数组
//memset()作用:可以方便的清空一个结构类型的变量或数组。
//例句:memset(aTxbuffer,0,sizeof(aTxbuffer)) 用memset清空aTxbuffer。
RxLine=0; //清空接收长度
Rx_flag_finish=0;
Rx_flag = 0;
}
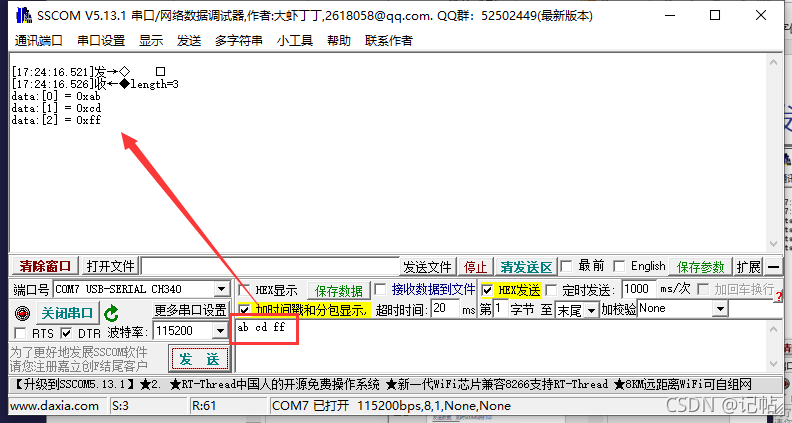
发送数据,并且以0xff结尾
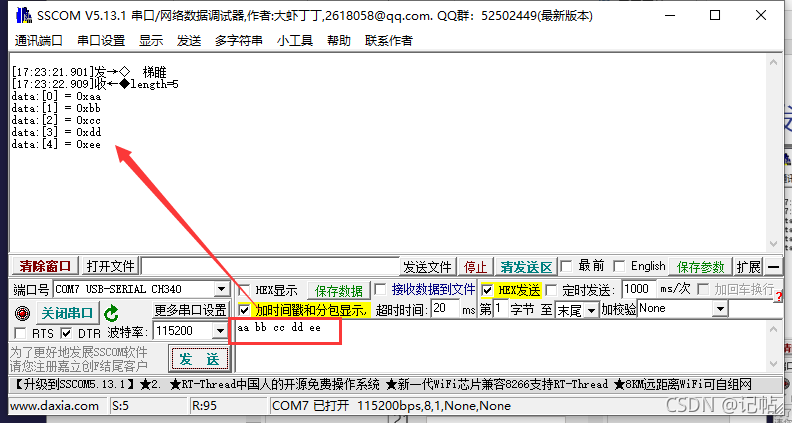
发送数据,延时500ms后打印
审核编辑:汤梓红
-
 记帖MCU
2022-11-18
0 回复 举报交流ⓆU_N:6_15061293 收起回复
记帖MCU
2022-11-18
0 回复 举报交流ⓆU_N:6_15061293 收起回复
-
瑞萨e2studio(12)----USRT通过定时器中断方式接收不定长数据2026-06-02 484
-
使用瑞萨e² studio FSP基于RA2E1定时器配置PWM输出2023-08-01 2518
-
CW32L083串口中断+定时器实现不定长数据接收2023-07-12 4090
-
瑞萨e2studio(7)----ADC通过单次扫描多通道方式采样2022-11-18 3976
-
瑞萨e2studio(8)----PWM2022-11-15 2763
-
STM32CUBEMX(8)--USART通过定时器中断方式接收不定长数据2022-11-14 2933
-
瑞萨e2studio----定时器AGT配置PWM输出2021-11-11 3049
-
瑞萨e2studio----USRT通过定时器中断方式接收不定长数据2021-11-02 3105
全部0条评论

快来发表一下你的评论吧 !
