

认识一下并列刷写(Parallel Flash)
电子说
描述
我们知道,一辆车上的ECU数量少则几十个,多则上百个。假设这样一种场景,车辆由于某种原因导致一部分ECU功能失效,需要重新更新这些ECU的Application程序,如果一个一个进行更新,势必花费一点时间,而作为消费者,总希望自己的车子能快点修好,维修人员又何尝不是呢?所以,并列刷写(Parallel Flash)和队列刷写(Queued Flash)来了。
再有,在车辆下线时EOL(End of Line),工厂追求效率,一般会1(刷写上位机)拖N(N个 ECU)刷写,这是不是一种Parallel Flash呢?
再次提示:Queued Flash针对 单个ECU ,Parallel Flash针对 多个ECU ,且两种技术可以同时使用。本文,我们认识一下Parallel Flash。
1
整车网络拓扑
在了解Parallel Flash之前,我们先认识一下整车网络拓扑。为便于理解,我们简单示意整车的网络拓扑结构。整车网络中,不仅仅只有Can总线,还会有Ethernet、Flexray以及Lin总线。
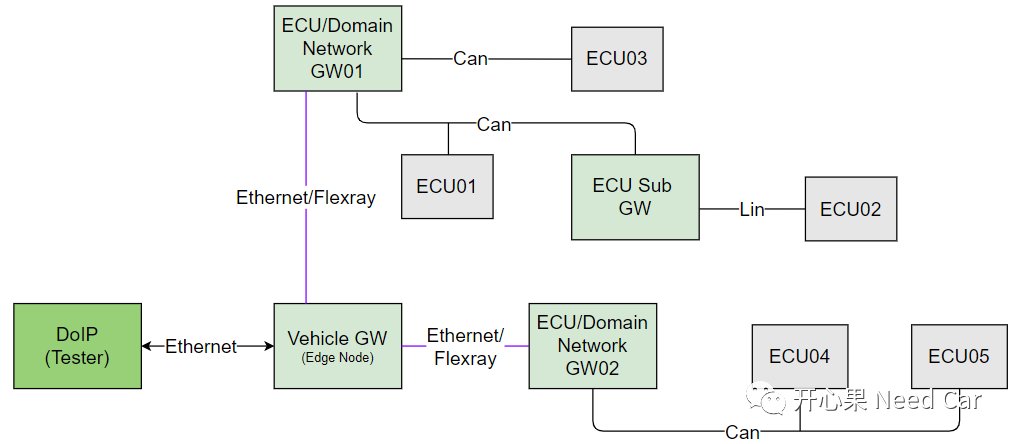
如上图,整车中的网关可以分为三种类型:Vehicle GW(Edge Node)、ECU/Domain Network GW、ECU Sub GW。
Vehicle GW(Edge Node) :与外部设备(Tester)通过以太网通信,也称为边缘节点。边缘节点与域网关通过主干网相连,主干网会选择速率相对较高的总线,比如:Ethernet/Flexray。
ECU/Domain Network GW :域网关,整车会分为动力域、影音域等多个域。域网关与子网关或者终端ECU连接,之间可以通过速率相对低一些的Can/Lin总线通信。
ECU Sub GW :子网关,子网关之下会挂接终端ECU,子网关与终端ECU之间可以通过Can/Lin总线通信。
既然Ethernet的速率快,为啥还整这么多总线呢?谁家也不是地主,成本是每家OEM都很在乎的事,保证既定功能目标的前提下,OEM会想方设法地降成本,不然,如何适应丛林法则?Ethernet虽然快,但是成本高,所以,OEM的EE部门在整车的拓扑设计中,会考虑好总线的选择。
2
Parallel Flash刷写流程
假设有两个ECU:ECU01和ECU02需要同时刷写,且ECU01和ECU02均挂接在子网关GW-S下,子网关GW-S在中央网关GW-C下,上位机(Tester)通过以太网(DoIP)进行刷写。这里分两种情况讨论:
第一:GW的处理能力不足
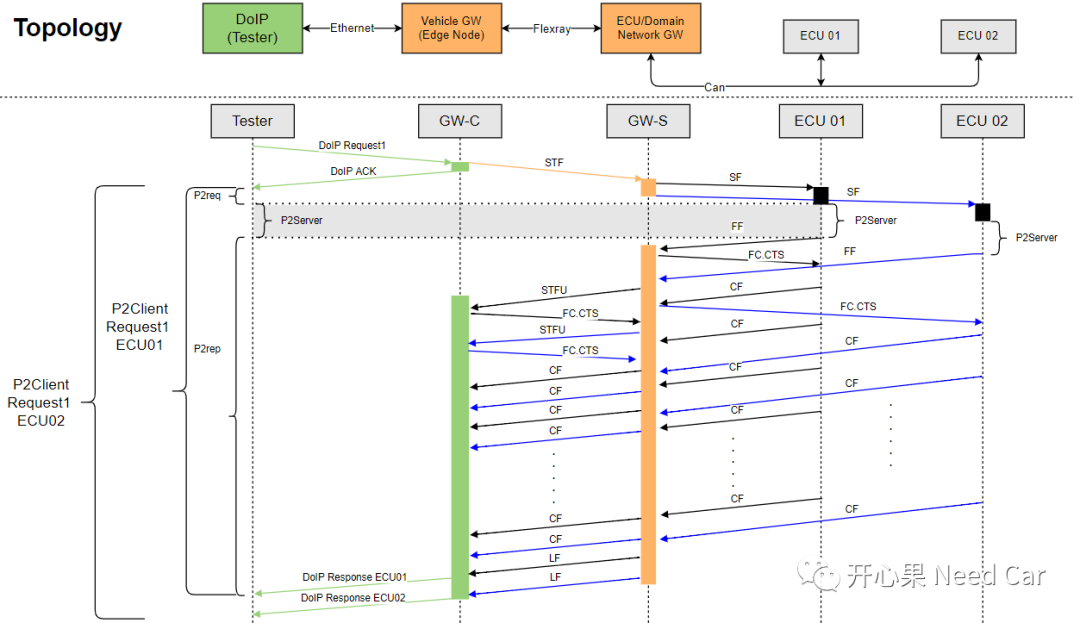
第二:GW处理能力足够
1、刷写流程解析
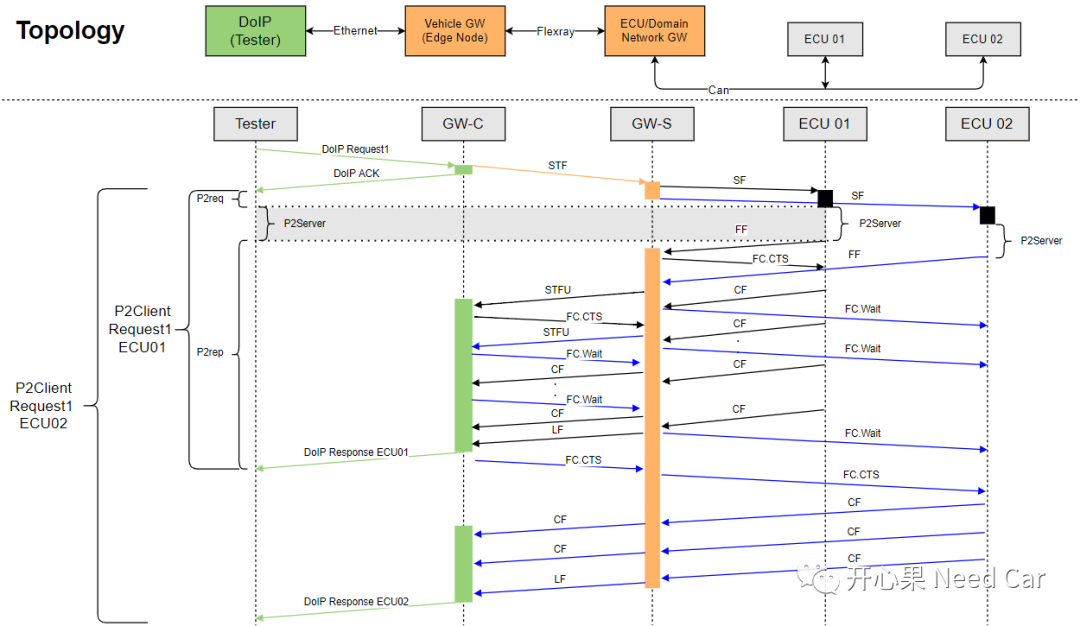
假设 :用功能寻址发送$19 02 08服务,读取ECU01和ECU02故障信息,回复信息需要 多帧传输 。
提示 :基于第一种情况讨论
- Tester通过DoIP发送一帧功能寻址诊断请求(Request1 = $19 02 08)给GW-C;
- GW-C会立即应答上位机(因为DoIP诊断请求使用Tcp协议),这相当于Can总线的ACK应答机制,同时将Request1通过Flexray总线路由给GW-S;
- GW-S进一步将Request1由Flexray总线转成Can总线路由给ECU01和ECU02;
- ECU01和ECU02在各自的P2Server时间内给出响应,即:首帧(FF:Frist Frame)。 受限于GW-S的处理能力 ,GW-S先给ECU01发送FC.CTS(继续连续帧发送,注意:这里使用物理寻址发送给ECU01),让ECU01先发送CF(Consecutive Frame )帧,而让ECU02等待ECU01处理完(给ECU02发送FC.Wait,物理寻址发送流控等待),当GW-S处理完ECU01以后,再给ECU02发送FC.CTS( 物理寻址发送 ),完成ECU02的处理;
- GW-S将Can总线传来的FF转换成Flexray的STFU(Start Frame Unacknowledged),之后通过Flexray总线路由给GW-C;
- GW-C接收到GW-S转发的ECU01 LF(Last Frame)帧以后,响应Tester(DoIP Response ECU01);
- GW-C接收到GW-S转发的ECU02 LF(Last Frame)帧以后,响应Tester(DoIP Response ECU02)。
2、问题拓展
第一:如上的刷写流程可以看出,诊断命令Request1经过GW-C、GW-S,到诊断命令被处理(P2Server时间),路由消耗的时间不少,从这个角度考虑,能理解OEM为什么会约束严苛的路由时间了吧,就是为了提高刷写的速率。
第二:功能寻址的诊断请求不仅发送给终端ECU(比如:上述的ECU01和ECU02),GW节点也需要处理该诊断指令(比如:上述的GW-C、GW-S)。
第三:我们常常看到这样的约束条件:“ 功能寻址的$3E 00/80指令与物理寻址的非$3E 00/80指令同时请求某个ECU时,功能寻址的$3E 00/80指令需要优先处理 ”。为什么呢?毕竟让节点保持在编程会话更重要。
第四:上述我们看到的是DoIP发送功能寻址给到ECU01和ECU02,这是 同一个指令发送给不同的ECU 。而Parallel Flash中还有一种情况,DoIP分别给ECU01、ECU02发送物理寻址的指令(比如:$10 01),为什么可行?一般诊断中,Ethernet总线的速率是100Mbps,而Can总线速率为500kbps,Ethernet总线速率是Can总线通信速率的200倍,其数据的处理能力足以支撑以太网使用物理寻址给一定量的ECU分别****发送 不同的诊断指令 ,并处理各个ECU的响应数据。
第五:每经过一次GW,指令的路由都会有一定的延迟。
第六:GW处理能力足够与否,首先需要看主芯片的资源是否够用,虽然开辟更多的RAM去处理诊断指令可以使得刷写速率更快(上图中的第二种情况),但是面对的资源开销也是相当可观。尤其当总线转换时,TP层、PduR模块都需要开销资源,而且开销量都不小。
审核编辑:刘清
-
认识一下NI SWITCH模块的组成和特点2024-03-22 3607
-
认识一下几个常用的门级电路2023-10-09 3698
-
认识一下只有driver的验证平台2023-06-15 1691
-
简单认识一下EMC中共模和差模的区别2023-06-08 11450
-
带你认识一下铝电解电容2023-05-16 9101
-
认识一下丙烷传感器2022-09-07 3151
-
认识一下甲醛传感器2022-08-23 3003
-
简单地认识一下D/A和A/D2022-02-24 1584
-
先来认识一下正激的基本原理2021-12-31 3300
-
认识一下针对单片机几个基本概念2021-11-22 1131
-
认识嵌入式Linux2021-11-05 999
-
带你重新认识了一下真正的PID2020-10-10 4337
-
请教一下关于asmi_parallel ip核的使用方法2018-06-29 4356
-
认识一下这款名叫“CAN总线存储器”的神器2018-05-20 9157
全部0条评论

快来发表一下你的评论吧 !
