

基于python的无人机测向天线阵子设计方案
军用/航空电子
描述
《零基础入门智能射频》专栏#使用Python+射频搭建一个射频开发架构,将不同的软件连接起来提供一站式服务,提供接口让设计师更专注于业务开发,不再疲惫于学习软件使用操作,让人工智能与射频来一次邂逅,将碰撞出怎样的火花呢,拭目以待吧。 前言
多旋翼无人机具有环保、噪音小、体积小、重量轻、成本低、携带方便,具有速度可控、垂直起降、精准悬停等优势,已在民用领域,无人机在农林植保、抢险救灾、物流运输、安防巡检等方面发挥了重要作用;同时在军用领域,无人机因拥有高空、高速、隐身、长航时等特性,在战场监视、情报搜集、电子侦察、指控通信、电子攻击、火力打击等领域承担起越来越重要的任务。
与此同时,随着各种操纵方便的遥控直升机、多旋翼飞行器日渐普及,“黑飞”无人机干扰航空秩序等意外事件频发,对重要地域安全保卫、治安管理等构成了严峻挑战,引发各国对反无人机系统的高度关注。比如,国家禁飞区域包括:所有政府机构上空、所有军事单位上空、政府执法现场、火车站、汽车站广场等人流密集地方、危险物品工厂、仓库等。
虽然部分无人机企业在其产品中为无人机飞行划定了禁飞区域禁止飞行,但无人机配件在网上买卖的门槛很低,很容易就能够组装一台能够飞行的无人机。加之多数无人机用户在没有经过基础的飞行及安全培训,就在各种禁飞区域飞无人机,影响民航安全、炸机、伤人等事件频繁出现。
因此,无人机的安全防范和管控,已经成为无人机行业的重点内容。无人机探测解决方案已经变得非常重要。可对无人机进行无线电信号侦测,实现无人机的无线电测向。
测向天线阵
无人机测向天线阵按照采用的测向接收机不同,可以分为以下两种:
1、单通道测向天线阵 无线电测向采用天线对信号源发出的信号进行接收,有些测向技术采用的是单个天线,但是测向系统采用的是多阵元天线阵作为空间信号的接收设备,通过对各个阵元天线间接收到信号的处理,获得其幅度和相位,由于幅度和相位与信号的来波方向有关,所以根据这种关系可以确定信号的来波方向。
2、双/多通道测向天线阵
图3 测向天线分类
无人机测向天线阵受测向系统应用环境中物理结构的限制,天线布阵区域常常只能在某一特定的空间内。就干涉仪测向体制而言,常见的布阵形式有图中所示几种。
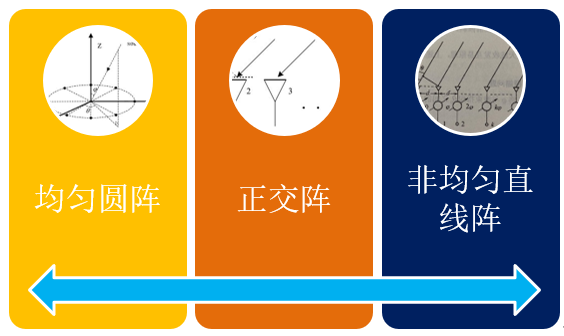
图4 测向阵天线阵型
从上图可知,不论测向天线阵采用哪种实现形式,多阵元天线阵的样式多种多样,如五阵元天线阵、八阵元天线阵、四阵元天线阵、环形天线阵等。不同的天线阵有不同的布局,每种天线阵的特性也是大不相同,要根据实际的需要选择不同形式的天线阵。
无论空间谱测向还是干涉仪测向,现在比较成熟的是均匀天线阵,如圆阵、线阵等。
便携式测向天线阵子设计
本项目设计了小型化的阵子, 为了获取良好的宽带匹配效果,我们借助研发的python天线自动化设计平台,对PCB电路的各参数进行了自动设计。
下面是整个软件的启动接口,分为四个函数模块,分别完成天线建模、边界条件设置、分析计算和工程保存功能。
# 天线建模
ANNT_DRAW()
# 设置边界条件
ANNT_SETMART()
# 分析计算
ANNT_Analyze()
# 工程保存
ANNT_Save()
下图是第一个函数完后天线建模后的模型, 从图中可见,该天线阵子采用PCB电路形式实现偶极子天线,其在工作频点处具有较宽波束和良好的50Ω匹配。阵子结构如下,在PCB的两面分别为馈电点和辐射体,辐射体的结构可以实现较宽的波瓣。
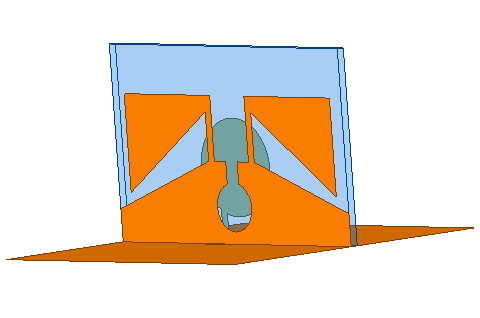
图5 本文的测向阵子
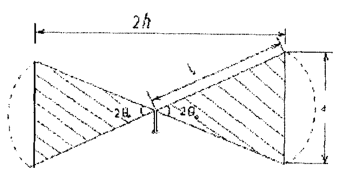
其工作原理与传统的三角形PCB阵子相类似,可视作一种变形,当张角2Θ较大时具有较好的宽频特性,但其数值分析比较困难,为了实现天线阵子的驻波比优于1.2,调用了python天线自动化设计平台的天线自动建模模块,由python 自主完成天线阵子模型的构建。
# 天线自动建模
def annt_modify():
draw_model()
result=annt_anysl()
for item in result:
if item["s11"]>-20:
changemode()
else:
break
ANNT_SETMART()函数实现仿真前的边界处理,包括设置材料属性、激励源设置以及辐射边界设置等。
ANNT_Analyze()函数负责天线阵子的仿真,下面是该天线阵子的特性。
其S11如下图所示,在工作频点5.8GHz处其S11达到了-25dB,即VSWR<1.2。在该处阻抗实现良好匹配,意味着不需要额外的阻抗转化电路就可以实现50Ω的匹配,简化了电路设计,降低设计成本。
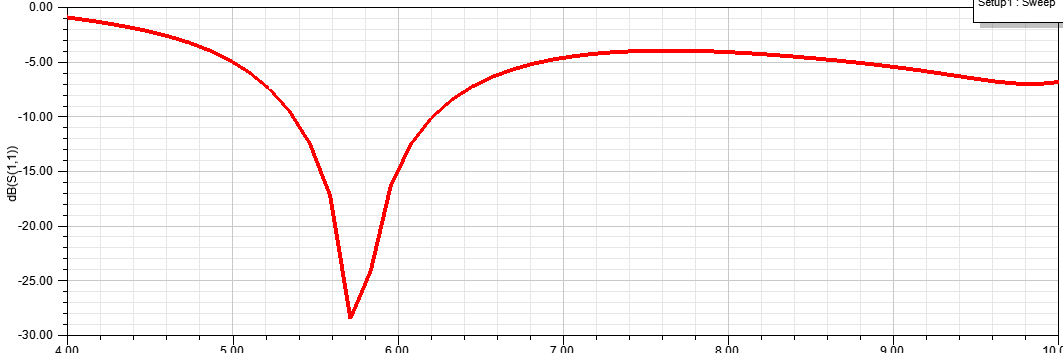
图6 S11曲线
图7是该型阵子的电流分布,从图中可以清晰的看出该阵子的馈电方式不但实现了阻抗匹配,同时也保证了有效馈电。
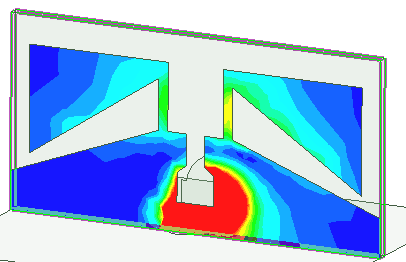
图7 电流分布
下图是该阵子的不圆度,其具有良好的不圆度,从而有效的保障了使用该阵子作为测向天线阵的测向准确度。
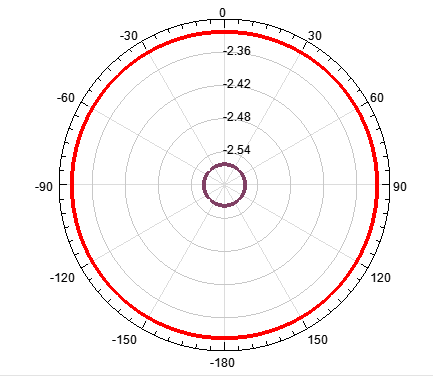
图 8 不圆度
下图是天线阵子的方向性,阵子底部的反射板阻挡了其向后辐射,使其在H面为0度到90度。
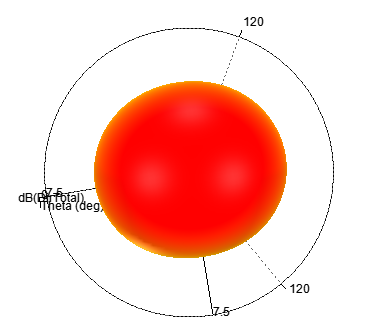
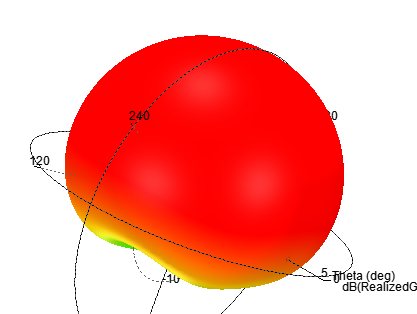
图9 测向阵子X-Y平面@5.8GHz
便携式五阵元测向天线阵
基于上述的小型化天线阵元,设计了一款五阵元测向线阵,,它是将各阵元均匀等距的分布到一条直线上,阵元间隔是信号波长的二分之一,各阵元间具有相同的特性,如下图所示。
该天线阵子的特定构型决定了其组成的天线阵具有两种排列形式,分别如图10和图11 ,不同的排列方式中阵子间的寄生耦合是不同的,两种构型必然有一种寄生耦合影响较小,那么选哪一种适合用于无人机的测向天线阵呢,我们下一期文章再见。
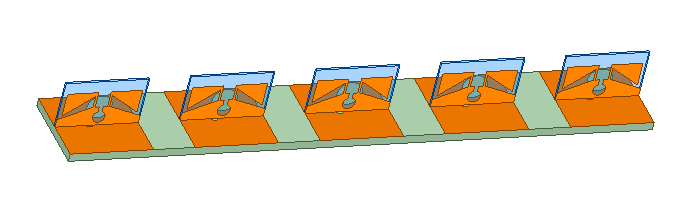
图10 五阵元测向线阵排列方式1
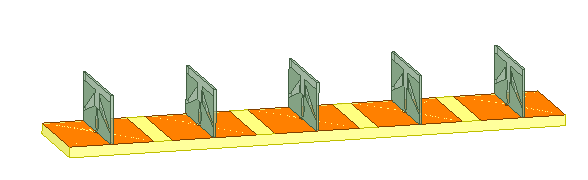
图11 五阵元测向线阵排列方式2
编辑:黄飞
- 相关推荐
- 热点推荐
- 无人机
-
无人机开发方案要领与电路图集锦2015-05-07 10543
-
无人机侦测和反制系统2017-04-05 8674
-
无人机射频干扰原理概论2017-05-26 4639
-
SKYLAB详解无人机GPS模块的作用及无人机gps模块选型2017-06-22 7491
-
无人机电源系统设计方案探讨2018-10-09 3363
-
AMEYA360设计方案丨通用无人机解决方案2018-10-25 1641
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 3865
-
多轴无人机BLDC驱动解决方案2020-07-02 3426
-
航模/无人机遥控的解决方案2020-07-03 3512
-
反制无人机枪解决方案2020-07-15 1806
-
郑州无人机侦测反制系统使用更便捷2020-09-10 1738
-
多个天线阵子与馈线是如何连接的?2021-05-26 4195
-
PLATH短波测向天线介绍2011-02-22 1413
-
基于python的天线阵列的信号处理算法2022-10-19 4524
-
深圳军亿电子|无人机侦测设备和无人机反制设备的组成部分2022-07-22 2091
全部0条评论

快来发表一下你的评论吧 !
