

如何使用PIC微控制器旋转步进电机
控制/MCU
描述
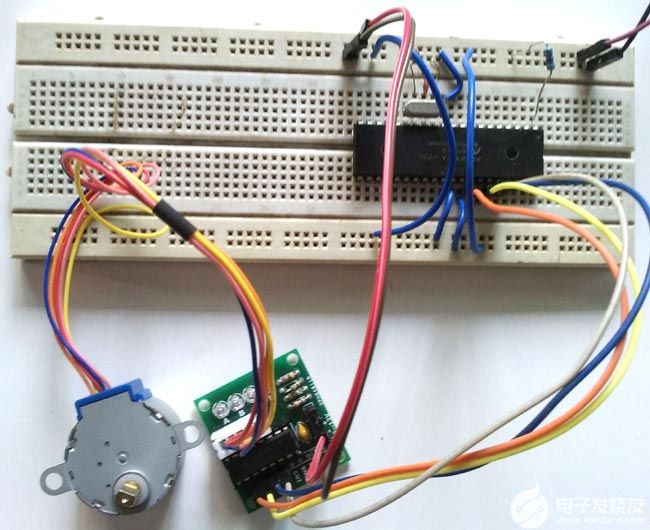
步进电机是一种专门设计的电机,可按步进旋转。步进电机的速度取决于施加在其上的电信号速率。不同的模式可以控制步进电机的方向和旋转类型。主要有两种类型的步进电机可供选择,单极和双极。单极更容易操作、控制,也更容易获得。在本教程中,我们将步进电机与PIC微控制器PIC16F877A连接。
我们正在为这个项目使用28BYJ-48步进电机,价格便宜且易于获得。它是5V直流单极步进电机。我们还使用该电机提供的模块,该模块由ULN2003步进电机驱动器IC组成。ULN2003是达林顿对阵列,可用于驱动该电机,因为 PIC 微控制器无法提供足够的电流来驱动。ULN2003A能够以 600mA 的峰值电流驱动500mA的负载。
步进电机:

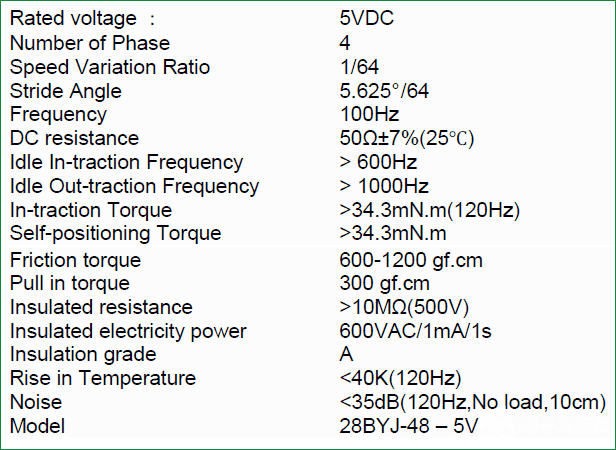
让我们从数据表中查看28BYJ-48 步进电机的规格。
如何旋转步进电机:
如果我们看到数据表,我们将看到引脚。
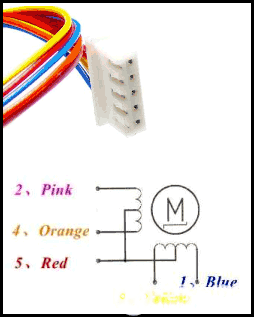
电机内部有两个中心抽头线圈可用。红线是两者的通用线,将连接到VCC或5V。
其他 4 根线粉红色、红色、黄色和蓝色将根据电信号控制旋转。此外,根据运动的不同,该电机可以使用 3 个步骤进行控制。全驱动模式、半驱动模式和波浪驱动模式。
步进电机的三种驱动模式:
全驱动:如果两个定子电磁铁同时通电,电机将以全扭矩运行,称为全驱动顺序模式。
| 步 | 蓝 | 粉红色 | 黄色 | 橙 |
| 1 | 1 | 1 | 0 | 0 |
| 2 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 | 1 |
半驱动:当一相和两相通电时,电机将以半驱动模式运行。它用于增加角度分辨率。缺点是这种运动产生的扭矩较小。
| 步 | 蓝 | 粉红色 | 黄色 | 橙 |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 1 | 1 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 1 | 1 | 0 |
| 5 | 0 | 0 | 1 | 1 |
| 6 | 0 | 0 | 0 | 1 |
| 7 | 1 | 0 | 0 | 1 |
| 8 | 1 | 0 | 0 | 0 |
波浪驱动:在这种模式下,一个定子电磁铁被打开。它遵循与全驱动器模式相同的 4 个步骤。它消耗低功率和低扭矩。
| 步 | 蓝 | 粉红色 | 黄色 | 橙 |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
ULN2003 步进电机驱动器:
让我们了解由ULN2003 IC组成的分线板。了解引脚输出很重要。
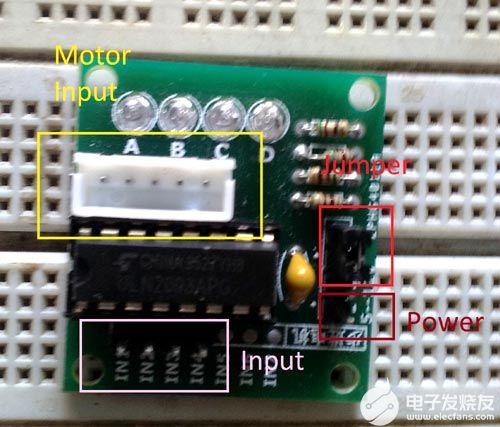
黄色部分用于连接电机,红色部分显示跳线,放置跳线很重要,因为它将为电机启用续流二极管保护。粉红色输入用于微控制器连接。
我们将以顺时针方向以全驱动模式旋转电机,并以逆时针方向以波浪驱动模式再次旋转电机。
必需组件
图16F877A
编程套件
面包板
20兆赫晶体
33pF 圆盘电容器 – 2 个
4.7k 电阻
伯格线和引脚
ULN2003A 分线板和 28BYJ-48 步进电机。
要连接的其他电线
5V 电源单元或墙上适配器,额定电流为 500mA
电路图及说明
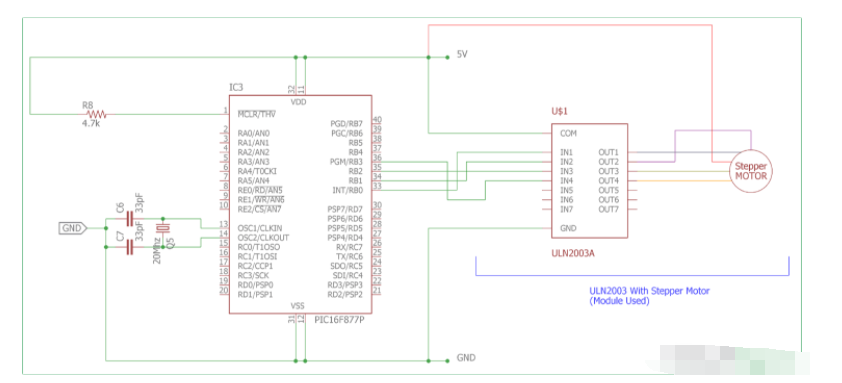
在电路图中,左侧显示 PIC16F877A,右侧显示 ULN2003A 连接。ULN2003 和步进电机部分位于分线板内。
从分线板到微控制器单元的连接将是-
A.IN1 =>引脚33
B.IN2 => 引脚34
C.IN3 =>引脚35
D.IN4 => 引脚36
我连接了所有组件和您的硬件来旋转步进电机与PIC微控制器已准备就绪。
如果您不熟悉 PIC 微控制器,请按照我们的 PIC 微控制器教程进行操作,说明 PIC 微控制器入门。
代码说明
与往常一样,首先,我们需要在 pic 微控制器中设置配置位,然后从 void main 函数开始。
这些是微控制器单元和库头文件的配置位的宏。
#define _XTAL_FREQ 200000000 //Crystal Frequency, used in delay
#define speed 1 // Speed Range 10 to 1 10 = lowest , 1 = highest
#define steps 250 // how much step it will take
#define clockwise 0 // clockwise direction macro
#define anti_clockwise 1 // anti clockwise direction macro
在第一行中,我们定义了延迟例程所需的晶体频率。其他宏用于定义与用户相关的选项。
如果您看到代码,则定义了三个函数,用于以顺时针和逆时针方向的三种模式驱动电机。以下是三个功能:
1.空隙full_drive(字符方向)
2.空隙half_drive(字符方向)
3.空隙wave_drive(字符方向)
在下面给出的完整代码中检查这些函数的定义:
现在在 void main 功能中,我们根据步骤使用全驱动模式顺时针驱动电机,几秒钟后,我们再次使用波浪驱动模式逆时针旋转电机。
void main(void)
{
system_init();
while(1){
/* Drive the motor in full drive mode clockwise */
for(int i=0;i
{
full_drive(clockwise);
}
ms_delay(1000);
/* Drive the motor in wave drive mode anti-clockwise */
for(int i=0;i
{
wave_drive(anti_clockwise);
//full_drive(anti_clockwise);
}
ms_delay(1000);
}
}
这就是我们如何使用PIC微控制器旋转步进电机。步进电机在数控机床、机器人和其他嵌入式应用中非常有用。
/*
* File: main.c
* Author: Sourav Gupta
* By:- circuitdigest.com
* Created on May 10, 2018, 1:26 PM
* This program will drive a servo motor.
*/
// PIC16F877A Configuration Bit Settings
// 'C' source line config statements
// CONFIG
#pragma config FOSC = HS // Oscillator Selection bits (HS oscillator)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config BOREN = ON // Brown-out Reset Enable bit (BOR enabled)
#pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3/PGM pin has PGM function; low-voltage programming enabled)
#pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
#include
#include
/*
Hardware related definition
*/
#define _XTAL_FREQ 200000000 //Crystal Frequency, used in delay
#define speed 1 // Speed Range 10 to 1 10 = lowest , 1 = highest
#define steps 250 // how much step it will take
#define clockwise 0 // clockwise direction macro
#define anti_clockwise 1 // anti clockwise direction macro
/*
*Application related function and definition
*/
void system_init (void); // This function will initialise the ports.
void full_drive (char direction); // This function will drive the motor in full drive mode
void half_drive (char direction); // This function will drive the motor in full drive mode
void wave_drive (char direction); // This function will drive the motor in full drive mode
void ms_delay(unsigned int val);
/*
* main function starts here
*/
void main(void)
{
system_init();
while(1){
/* Drive the motor in full drive mode clockwise */
for(int i=0;i
- 相关推荐
- 热点推荐
- 步进电机
- PIC16F877A
- PIC微控制器
-
步进电机控制器电路图 步进电机控制器的分类及其特点2024-06-24 7233
-
步进电机控制方法 步进电机控制器参数设置2024-01-19 5616
-
步进电机控制器原理 步进电机控制器的应用设置2023-05-05 1149
-
步进电机控制器的应用设置2023-03-26 2437
-
怎样控制步进电机快慢_步进电机不用脉冲如何驱动2023-03-08 6927
-
将步进电机与PIC微控制器连接的方式2022-11-11 2078
-
硬盘步进电机速度控制器2022-08-05 1186
-
步进电机控制器怎么使用2021-07-19 7716
-
如何采用微控制器或数字信号处理器来控制步进电机2020-03-14 3972
-
步进电机控制器原理_步进电机控制器编程实例2019-10-01 17704
-
步进电机控制器的制作教程2019-08-08 20364
-
PIC微控制器技术及应用 24-29章2016-04-26 870
-
MAX1169 ADC与PIC微控制器的接口2009-01-23 832
全部0条评论

快来发表一下你的评论吧 !
