

几种较为常见的安全通道的生成方法介绍
电子说
描述
安全通道是什么呢?安全通道是指在无人机轨迹生成时,为了避免碰撞而设定的无人机可以飞行的通道。它连通了起点与终点,并且在安全通道内生成的任意轨迹都是安全无碰撞的。安全通道是轨迹生成中用于避免碰撞的重要技术,关于安全通道的生成目前已经有了许多的方法。一般来说,安全通道都是用多个连通在一起的多面体进行表示。这样安全通道的生成问题,可以转化为多个多面体生成。下面针对几种较为常见的安全通道的生成方法进行介绍。
1. 半定规划的迭代区域膨胀
为了获取多面体,这个方法首先构造一个初始椭球,由一个以选定点为中心的单位球组成。然后,遍历障碍物,为每个障碍物生成一个超平面,该超平面与障碍物相切并将其与椭球分开。再次,这些超平面定义了一组线性约束,它们的交集是一个多面体。然后,可以在那个多面体中找到一个最大的椭球,使用这个椭球来定义一组新的分离超平面,从而定义一个新的多面体。
选择生成分离超平面的方法,这样椭圆体的体积在迭代之间永远不会减少。可以重复这个过程,直到椭圆体的增长率低于某个阈值,此时我们返回多面体和内接椭圆体。这个方法具有迭代的思想,并且具有收敛判断的标准,算法的收敛快慢和初始椭球具有很大的关系。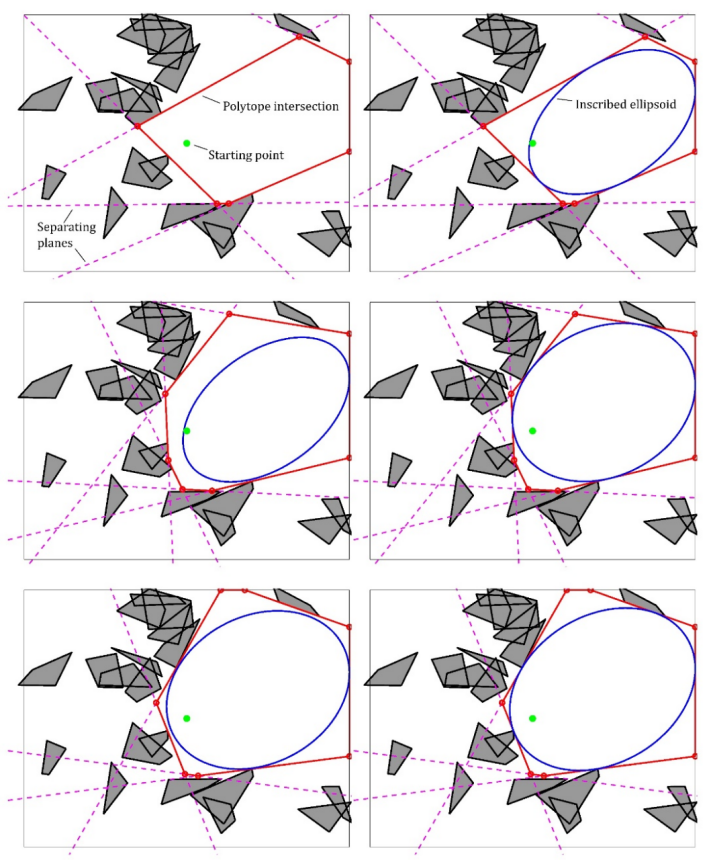
图 1 半定规划的迭代区域膨胀。每一行即为一次迭代操作,直到椭圆体的增长率低于阈值。
2. 基于凸分解的安全通道生成
基于凸分解的安全通道生成方法由四个步骤完成安全通道的生成,分别为:找到椭球、找到多面体、边界框、收缩。这四个步骤的具体介绍如下:
1)生成椭球
先形成一个球体,球的半径为两个路径点的距离,然后再进行收缩其中的两个长轴,以保证该椭球为最大椭球,最后再拉伸第三个轴(连接路径点的轴)以保证这个椭球是最大的。
椭球的计算是基于路径点进行的,路径点的疏密程度,将会影响椭球的个数,因此在使用时最好能够利用计算的椭球融合其包含的路径点,这样来减少计算路径点的个数。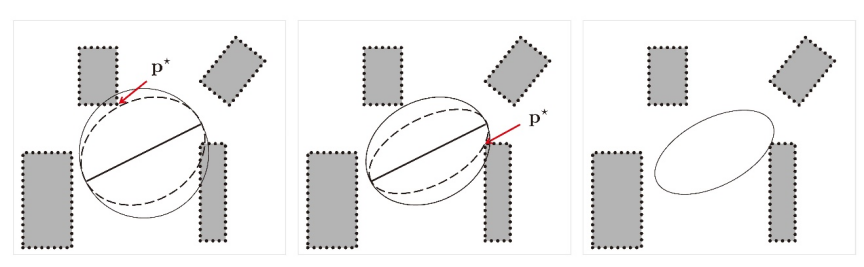
图 2生成椭球。粗线段为 L,灰色区域表示障碍物,白色区域为自由空间。左:从一个球体开始,我们找到离 L 中心最近的点 p*,并调整短轴的长度,使虚线椭球接触这个 p*。中:重复相同的过程,找到一个新的最近点 p* 和新的椭球。右:椭球内没有障碍物,当前椭球是最大椭球。需要多次迭代以确保最终的球体排除所有障碍。
2)找到多面体
找到多面体。不断扩张椭球直到和障碍物相切,保存切线。重复上面的操作,获得更多的切线,直到当前地图都和其相交为止。这个过程的主要计算量都在障碍物的判断中,因此计算很快。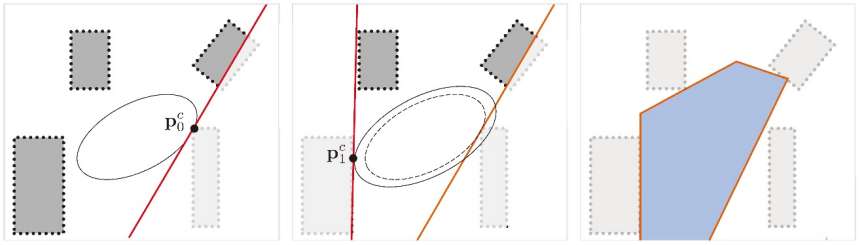
图 3生成多面体。左:找到椭球和超平面的第一个交点(红线),相应的半空间之外的障碍点被移除(阴影)。中:找到下一个交点(虚线椭球表示原始椭球,实线椭球表示新椭球),继续从地图中移除新半空间之外的障碍点。右:继续扩张直到当前地图中没有障碍物,凸空间 (蓝色区域)由半平面的交点定义。
3)边界框
边界框的作用是分割地图,将附近的local障碍物地图从全局地图中提取出来,也就是获得local障碍物地图。其主要原因是上面的操作不能对整个地图执行,因为那样的计算量太大了,因此可以在路径点附近打上边框,这样就能降低计算量了。边框大小的选择就非常具有经验性质了,最好能够涵盖所需要的信息。
4)收缩
对安全通道进行收缩,收缩的尺度由无人机的尺寸决定,这样的处理可以让无人机变成一个质点。收缩是对生成的多面体进行的,这样的好处是不会造成两个多面体出现不相交的情况。
3. 平行凸簇膨胀方法
上述的两种方法都是从点云地图出发,并且都是基于椭圆完成凸多面体的生成。而平行凸簇膨胀方法,与上面的方法不同,该方法是从栅格地图出发,利用最小凸集生成算法,完成凸多面体的生成。
其算法的思想是首先获得一个凸集,再沿着凸集的表面进行扩张,扩张之后再进行凸集检测,判断新扩张的集合是否保持为凸。一直扩张到不能再扩张为止,再提取凸集的边缘点,利用快速凸集生成算法,生成凸多面体。该算法的好处在于可以利用这种扩张的思路,将安全的多面体的体积尽可能的充满整个空间,因此获得的安全通道更大。
但其也具有一定的缺点,就是计算量比较大,计算所需要的时间比较长,为了解决这个问题,在该文章中,又提出了采用GPU加速的方法,来加速计算。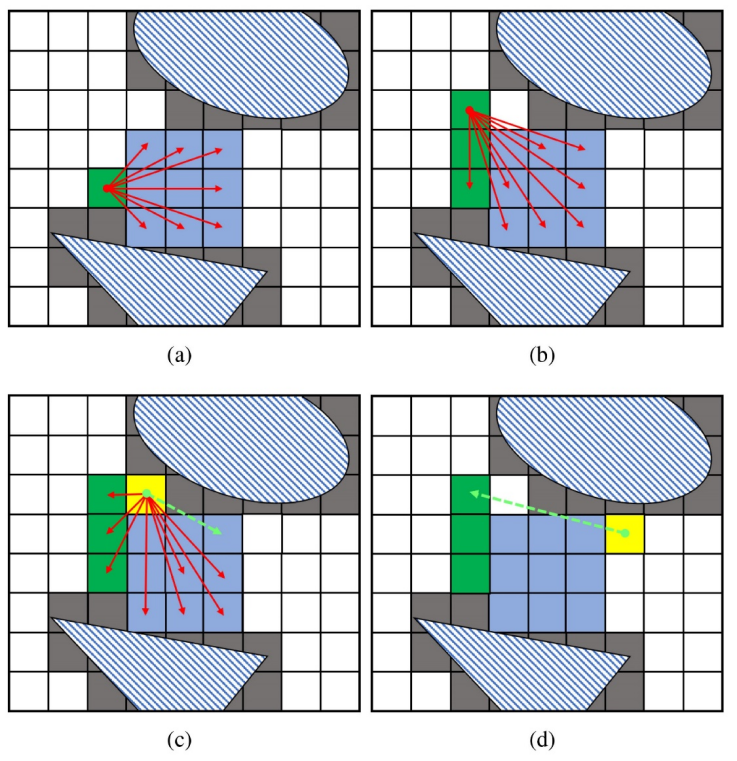
图 4 平行凸簇膨胀方法。在 (a) 和 (b) 中,所有合格的相邻单元格都被添加到凸簇中。在 (c) 和 (d) 中,由于进行边缘单元格凸集检测时,射线经过了不在凸簇的单元格,该单元格被排除在凸簇中。[3]
总结
安全通道的生成虽然是一个比较小的问题,但是因为它直接影响了最终生成轨迹的质量,因此也非常重要。安全通道能够直接转化为优化问题中的凸约束,这种特性应该也可以利用在其他的领域内。
审核编辑:刘清
- 相关推荐
- 热点推荐
- 无人机
-
介绍几种常见电阻器的测试方法2021-05-10 1780
-
PWM生成方法2021-08-09 1481
-
常见的几种生成负电源轨方案2022-11-08 1052
-
基于混沌序列的种子密钥表生成方法2009-09-02 789
-
几种常见路由器设置方法2011-12-12 14815
-
降雨量等值面生成方法的研究2015-12-18 1206
-
两种空间矢量脉宽调制生成方法的分析与比较2016-03-30 958
-
一种多尺度多视点特性视图生成方法的研究和应用_谢冰2017-03-15 841
-
一种新颖的自动化攻击图生成方法_武健2017-03-19 931
-
一种新的DEA公共权重生成方法2018-01-13 1220
-
一种全新的遥感图像描述生成方法2021-04-20 1431
-
基于Python-casacore的射电测量集文件生成方法2021-09-15 956
-
几种低相位噪声信号生成方法2021-09-16 4945
-
几种常见的电源检测方法2023-04-18 4435
-
PWM信号生成方法 PWM调制原理讲解2024-11-28 7502
全部0条评论

快来发表一下你的评论吧 !
