

 EtherCAT与RTEX驱动器轴回零的配置与实现
EtherCAT与RTEX驱动器轴回零的配置与实现
电子说
描述
上节课程,正运动小助手给大家分享了运动控制器提供的回零模式配置与实现。本节课程主要介绍控制器实现EtherCAT与RTEX驱动器的回零及其配置。
01 总线驱动器回零模式
正运动控制器提供自己的回零模式,也支持使用EtherCAT总线驱动器提供的回零模式,或RTEX总线驱动器的提供的回零模式,均可使用DATUM指令实现回零,但采用的回零模式和配置方法与控制器提供的回零方式有所区别。
以上两类总线驱动器回零模式采用21,回零模式由总线驱动器提供,参见驱动器手册说明。
语法:DATUM(21,驱动器提供的回零模式)
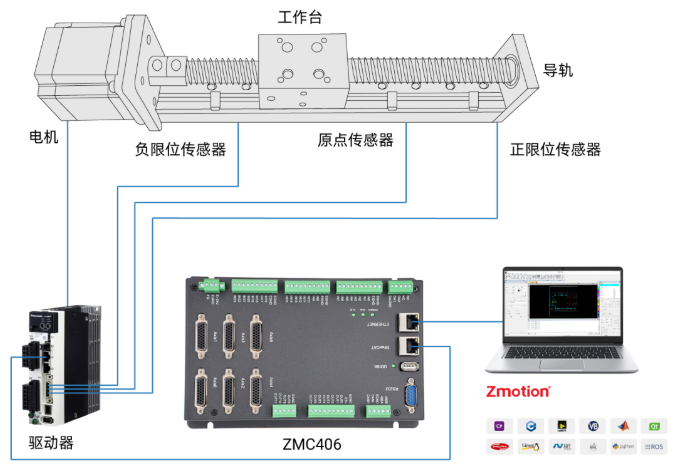
总线驱动器回零时,除了模式需要采用驱动器提供的,原点开关、正/负限位开关需要接入驱动器的IO端子上,一般驱动器IO端子有指定的HOME、POT,NOT用于回零,引脚需查看驱动器手册说明。
1.EtherCAT总线驱动器
可使用EtherCAT总线驱动器回零功能,DATUM(21,mode2),此时mode2有效,mode2为EtherCAT总线驱动器6098h提供的原点回归模式。
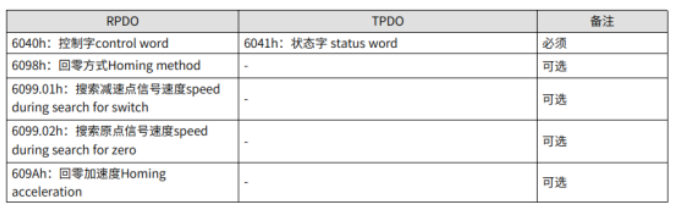
使用此模式需要参考驱动器手册的说明,找到手册对应的章节,如上图,配置驱动器回零PDO所需要的功能,按照驱动器手册提供的信号接线方式完成开关信号的接线,将原点和正/负限位信号接在驱动器IO指定的HOME、POT,NOT端子上,等待DATUM触发回零即可。
示例:初始化完成后再运行驱动器回零程序。
BASE(iAxis) '按驱动器轴号逐个回零
AXIS_STOPREASON = 0
SPEED = 100 '回零速度
CREEP = 10 '反找速度
ACCEL = 1000
DATUM(21,2) '驱动器回零模式value=2
WAIT IDLE
IF AXIS_STOPREASON = 0 THEN
?"回零成功"
ELSE
?"回零失败" ,"停止原因:",AXIS_STOPREASON,"状态字0X",HEX(DRIVE_STATUS)
ENDIF
2.RTEX总线驱动器
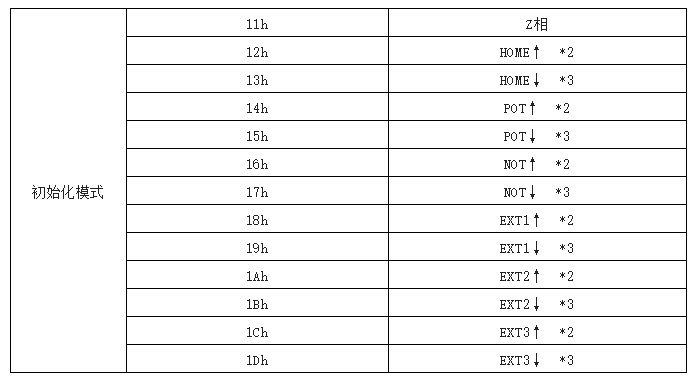
此模式下可使用RTEX总线驱动器回零功能,此时mode2有效,回零模式查看驱动器手册即可(如下表)。使用此模式原点和正负限位信号接在驱动器指定IO上,
等待DATUM触发回零即可。
02 EtherCAT总线驱动器回零方式
使用EtherCAT总线驱动器提供的回零,需要将原点信号接入驱动器指定IO上,不同的厂商的使用要求略有差异,需要阅读驱动器手册之后再进行配置。
参考步骤如下:
1.硬件接线:
以下以某个驱动器为例,将原点等信号接入下图指定引脚即可,无需映射,并且按要求给驱动器的IO端子供电。
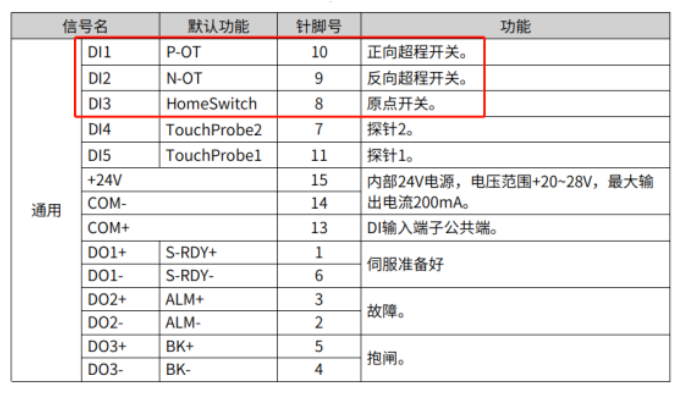
使用控制器OP输出模拟IO信号输入,控制器OUT0口接到驱动器控制端子8引脚,模拟原点信号,控制器OUT6口接到驱动器控制端子9引脚,模拟负限位信号,控制器OUT5口接到驱动器控制端子10引脚,模拟正限位信号。
2.驱动器配置要求:
根据驱动器手册说明配置回零所需要的功能,例如下方配置说明中,6040h和6041是必须模式,其他模式均为选配,故DRIVE_PROFILE配置驱动器PDO时,需要包含必须模式才可完成回零操作。
3.总线初始化:
运动下方初始化模板程序,合理配置DRIVE_PROFILE,使能总线驱动器。
4.驱动器回零:
初始化成功方可执行回零程序,设置合理的总线轴参数,配置回零的找原点速度SPEED和反找速度CREEP,发送DATUM(21,mode2)驱动器开始找原点运动,例程使用模式如下,回零成功停止运动,DPOS和MPOS自动清零。
程序分为两部分执行,先总线初始化,再回零。
1.总线初始化参考程序:
'*******************************************************ECAT总线初始化
global CONST BUS_TYPE = 0 '总线类型。可用于上位机区分当前总线类型
global CONST MAX_AXISNUM = 16 '最大轴数
global CONST Bus_Slot = 0 '槽位号0(单总线控制器缺省0)
global CONST PUL_AxisStart = 0 '本地脉冲轴起始轴号
global CONST PUL_AxisNum = 0 '本地脉冲轴轴数量
global CONST Bus_AxisStart = 0 '总线轴起始轴号
global CONST Bus_NodeNum = 1 '总线配置节点数量,用于判断实际检测到的从站数量是否一致
global Bus_InitStatus '总线初始化完成状态
Bus_InitStatus = -1
global Bus_TotalAxisnum '检查扫描的总轴数
delay(3000) '延时3S等待驱动器上电,不同驱动器自身上电时间不同,具体根据驱动器调整延时
?"总线通讯周期:",SERVO_PERIOD,"us"
Ecat_Init() '初始化ECAT总线
while (Bus_InitStatus = 0)
Ecat_Init()
wend
end
'***************************ECAT总线初始化*****************************
'初始流程: slot_scan(扫描总线) -> 从站节点映射轴/io -> SLOT_START(启动总线) -> 初始化成功
'**********************************************************************
global sub Ecat_Init()
local Node_Num,Temp_Axis,Drive_Vender,Drive_Device,Drive_Alias
RAPIDSTOP(2)
for i=0 to MAX_AXISNUM - 1 '初始化还原轴类型
AXIS_ENABLE(i) = 0
atype(i)=0
AXIS_ADDRESS(i) =0
DELAY(10) '防止所有驱动器全部同时切换使能导致瞬间电流过大
next
Bus_InitStatus = -1
Bus_TotalAxisnum = 0
SLOT_STOP(Bus_Slot)
delay(200)
slot_scan(Bus_Slot) '扫描总线
if return then
?"总线扫描成功","连接从站设备数:"NODE_COUNT(Bus_Slot)
if NODE_COUNT(Bus_Slot) <> Bus_NodeNum then '判断总线检测数量是否为实际接线数量
?""
?"扫描节点数量与程序配置数量不一致!" ,"配置数量:"Bus_NodeNum,"检测数量:"NODE_COUNT(Bus_Slot)
Bus_InitStatus = 0 '初始化失败。报警提示
return
endif
'"开始映射轴号"
for Node_Num=0 to NODE_COUNT(Bus_Slot)-1'遍历扫描到的所有从站节点
Drive_Vender = NODE_INFO(Bus_Slot,Node_Num,0) '读取驱动器厂商
Drive_Device = NODE_INFO(Bus_Slot,Node_Num,1) '读取设备编号
Drive_Alias = NODE_INFO(Bus_Slot,Node_Num,3) '读取设备拨码ID
if NODE_AXIS_COUNT(Bus_Slot,Node_Num) <> 0 the '判断当前节点是否有电机
for j=0 to NODE_AXIS_COUNT(Bus_Slot,Node_Num)-1 '根据节点带的电机数量循环配置轴参数(针对一拖多驱动器)
Temp_Axis = Bus_AxisStart + Bus_TotalAxisnum '轴号按NODE顺序分配
'Temp_Axis = Drive_Alias '轴号按驱动器设定的拨码分配(一拖多需要特殊处理)
base(Temp_Axis)
AXIS_ADDRESS= Bus_TotalAxisnum+1 '映射轴号
ATYPE=65 '设置控制模式 65-位置 66-速度 67-转矩
DRIVE_PROFILE = 1
disable_group(Temp_Axis) '每轴单独分组
Bus_TotalAxisnum=Bus_TotalAxisnum+1 '总轴数+1
next
endif
next
?"轴号映射完成","连接总轴数:"Bus_TotalAxisnum
DELAY 200
SLOT_START(Bus_Slot) '启动总线
if return then
wdog=1 '使能总开关
'?"开始清除驱动器错误"
for i= Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1
BASE(i)
DRIVE_CLEAR(0)
DELAY 50
'?"驱动器错误清除完成"
datum(0) '清除控制器轴状态错误"
DELAY 100
'"轴使能"
AXIS_ENABLE=1
next
Bus_InitStatus = 1
?"轴使能完成"
'本地脉冲轴配置
for i = 0 to PUL_AxisNum - 1
base(PUL_AxisStart + i)
AXIS_ADDRESS = (-1<<16) + i
ATYPE = 4
next
?"总线开启成功"
run "Basic1",1 '开启回零任务
else
?"总线开启失败"
Bus_InitStatus = 0
endif
else
?"总线扫描失败"
Bus_InitStatus = 0
endif
end sub
2.驱动器回零程序:
?"开始回零"
TABLE(0)=0
BASE(0)
UNITS=(8388608/360) '脉冲当量
SPEED=50 '找原点速度
CREEP=10 '反找速度
ACCEL=1000
DECEL=1000
DELAY(100)
DATUM(21,19) '开始回零,模式19
WHILE 1
WAIT IDLE
TABLE(0)=DRIVE_STATUS '读取6041h状态字判断回零状态
IF READ_BIT2(15,TABLE(0)) THEN
?"回零完成"
EXIT WHILE
ENDIF
WEND
END
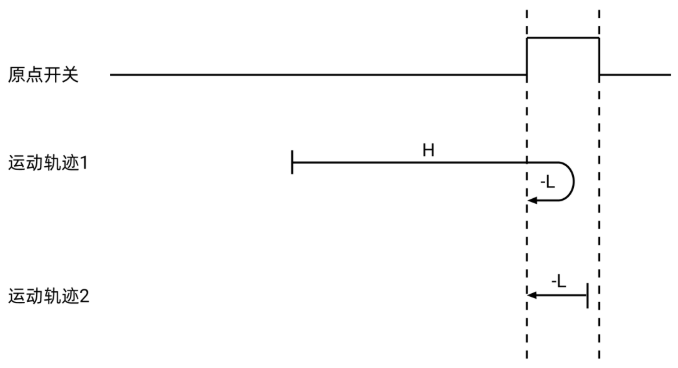
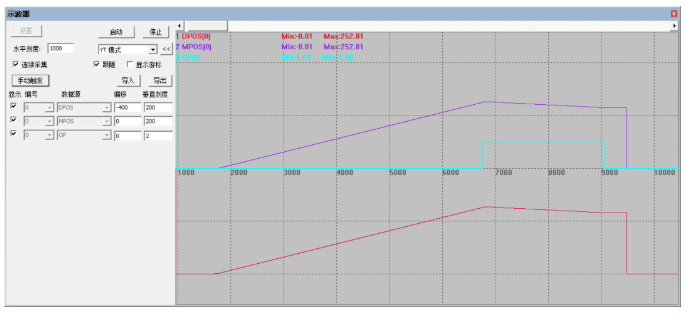
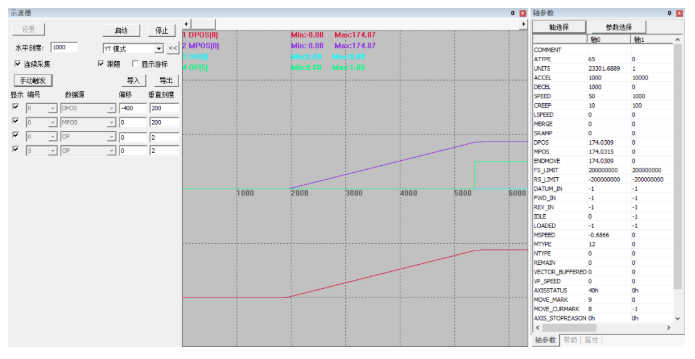
示波器采用回零成功波形如下:采用模式19,采用OP模拟原点信号,驱动器感应到原点后低速反找,离开原点时停止运动,清空位置信息。
回零时碰到限位开关停止运动,AXISSTATUS轴状态显示40h正在回零中,回零完成状态为0h。
本次,正运动技术EtherCAT与RTEX驱动器轴回零的配置与实现,就分享到这里。
- 相关推荐
- 热点推荐
- 驱动器
- 控制器
- EtherCAT总线
-
配置案例ModbusTCP转Profinet连接拧紧轴驱动器2022-08-15 3844
-
深度解析 | 低抖动高精度EtherCAT多轴控制的实现与实践案例2025-12-09 6079
-
labview下的ethercat模块如何与驱动器通讯2022-12-09 5498
-
EtherCAT总线运动控制的优势主要体现在哪?2023-02-20 2796
-
经济型EtherCAT运动控制器:EtherCAT总线快速入门2023-05-11 2002
-
应用案例丨伺服驱动器连接Ethercat转profinet网关2023-05-18 2271
-
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统2023-10-24 3243
-
工业通讯中CANOPEN转EtherCAT的转换2023-12-12 1626
-
EtherCAT总线运动控制的优势主要体现在哪?2023-12-13 3543
-
运动控制器轴回零的配置与实现2022-11-12 2919
-
介绍控制器实现EtherCAT与RTEX驱动器的回零及其配置2022-11-29 4501
-
第三方EtherCAT总线伺服驱动配置2023-05-25 10981
-
全国产EtherCAT运动控制边缘控制器(五):IO配置与回零运动的Python+Qt开发2023-10-20 1822
-
EtherCAT驱动器回零与控制器回零:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)2024-01-11 1610
-
总线驱动器回零轴不运动原因及解决方法2026-03-05 823
全部0条评论

快来发表一下你的评论吧 !
