

实测ubuntu20.04机械式激光雷达与相机联合标定
描述
安装功能包
实测 ubuntu20.04 本地安装
安装步骤如下:
下载功能包
git clone -c http.sslverify=false https://gitlab.acfr.usyd.edu.au/its/cam_lidar_calibration.git
成功提示:
安装依赖:
sudo apt update && sudo apt-get install -y ros-noetic-pcl-conversions ros-noetic-pcl-ros ros-noetic-tf2-sensor-msgs
成功提示:
安装pandas 和 scipy
pip install pandas scipy
将功能包拷入ros的工作空间,然后编译
catkin_make
不出意外会报错误
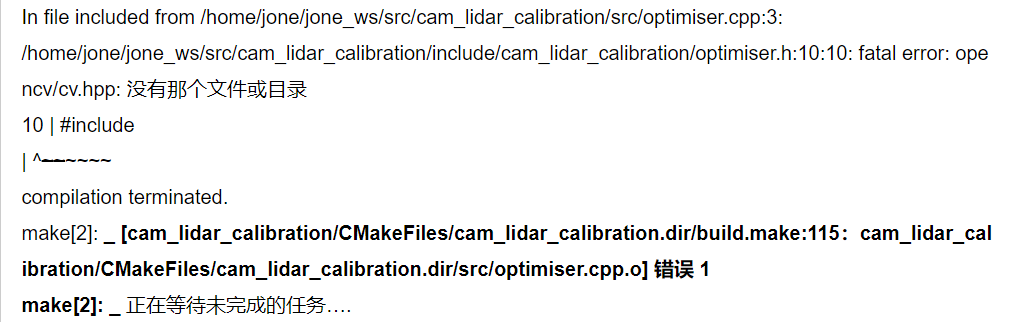
仍然是 ubuntu20.04 opencv 的 版本问题
错位解决办法:
打开include文件夹下的 optimise.h文件
将第10行
改为
再次编译报错:
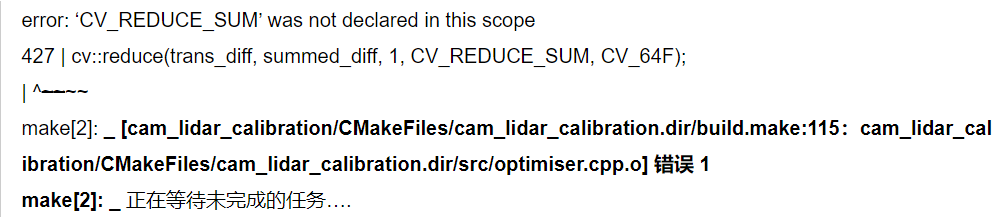
CV_REDUCE_SUM 这个变量没定义,opencv3到opencv4切换带来的错误
在 optimise.h文件中加入下面的包含文件
编译通过
功能包测试
作者在功能包中放了测试数据,提供测试
roslaunch cam_lidar_calibration run_optimiser.launch import_samples:=true
该程序根据cam_lidar_calibration/data/vlp/文件夹下的pose.csv标定,在该文件夹生成一个标定camera和lidar外参文件
终端输出
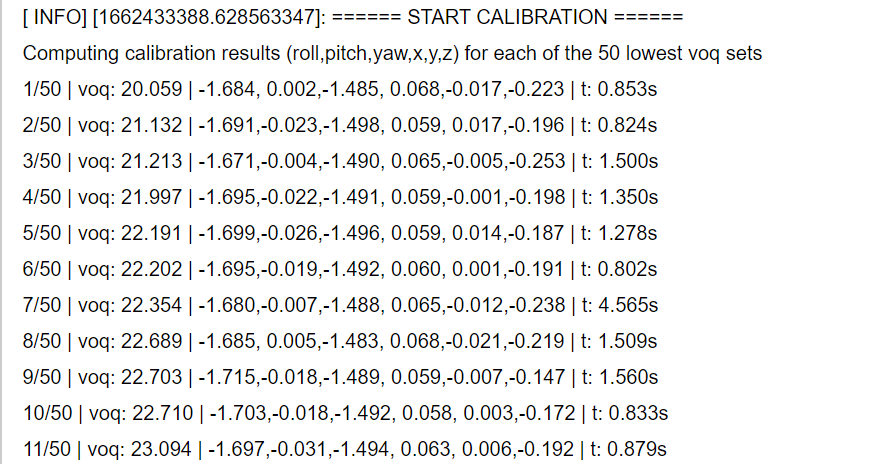
每一行则是迭代后的结果
终端输出这个的时候

表示迭代完了
然后获取评估校准结果
终端输出

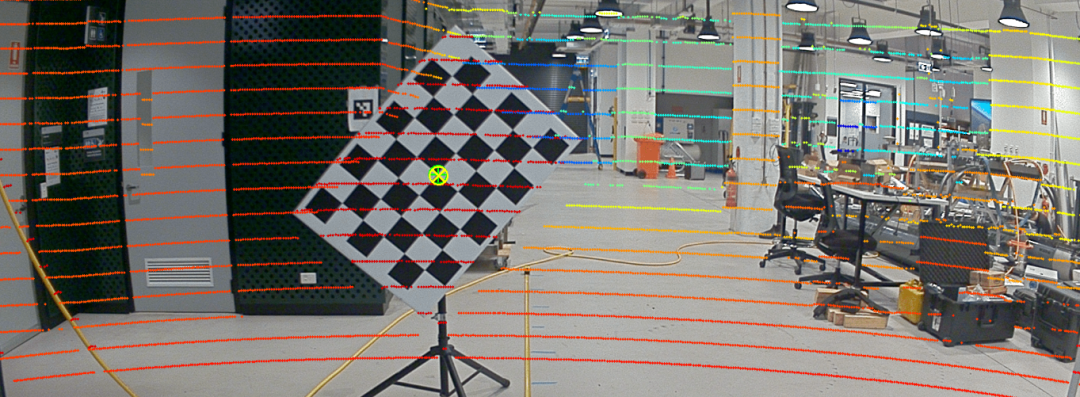
生成一个雷达投射到图片上的图片
利用功能包标定激光雷达和相机
设置参数
主要修改
cam_lidar_calibration/cfg/camera_info.yaml和
params.yaml
cam_lidar_calibration/cfg/camera_info.yaml 文件设置如下:
distortion_model: "non-fisheye"width: 1440height: 1080D: [-0.106460,0.103712,-0.000019,0.003994]K: [1213.343583,0.0,744.150520,0.0,1217.236982,586.154363,0.0,0.0,1]
设置是:
-
否为鱼眼相机
-
像素宽和高
-
内参矩阵
-
失真系数
相机的内参标定方法可以参考这篇博客:
params.yaml 文件设置如下:
# Topicscamera_topic: "/camera_array/cam0/image_raw"camera_info: "/camera_array/cam0/camera_info"lidar_topic: "/velodyne_points"
分别是:
-
相机消息名称
-
相机信息
-
激光雷达消息名称
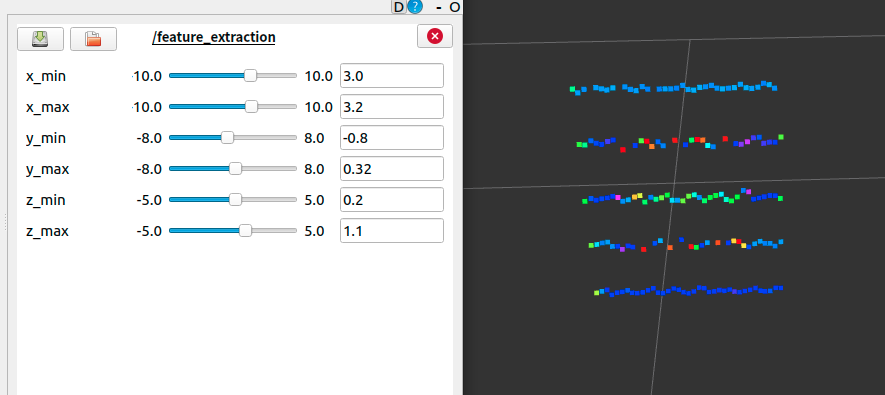
feature_extraction: x_min: -10.0 x_max: 10.0 y_min: -8.0 y_max: 8.0 z_min: -5.0 z_max: 5.0
点云的选取范围,用默认的就是,之后可以在线调
chessboard: pattern_size: height: 14 width: 9 square_length: 11 board_dimension: width: 390 height: 596 translation_error: x: 0 y: 0
标定棋盘的相关参数
和背板的相关参数
距离都是mm为单位
启动相机和激光雷达
启动相机
roslaunch spinnaker_sdk_camera_driver acquisition.launch
启动激光雷达
roslaunch velodyne_pointcloud VLP16_points.launch
启动功能包
开启程序采集表定数据,运行命令:
roslaunch cam_lidar_calibration run_optimiser.launch import_samples:=false
会出现RVIZ和rqt_reconfigure窗口,在RVIZ中panels->display修改相机的话题和激光雷达点云对应的frame_id。
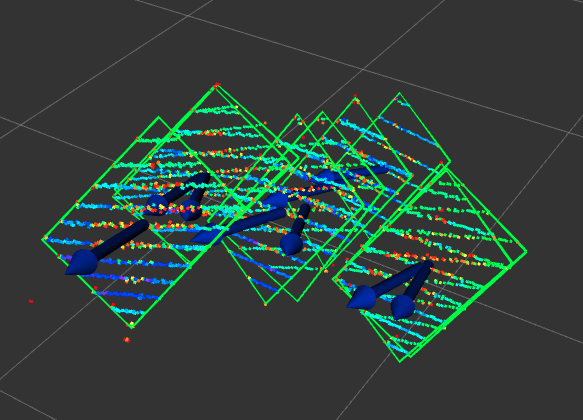
调整rqt_reconfigure /feature_extraction的xyz最大值最小值以使得标定板的点云和周围环境分开,使其仅显示棋盘。
如果棋盘没有完全隔离,可能会影响棋盘的平面拟合,还会导致棋盘尺寸误差较大。下图是过滤点云前后效果:
在过滤周围环境点云后,在rviz中点击Capture sample采集样本,会出线绿色框代表根据点云拟合出来的标定板平面
终端会打印出来添加的样本信息
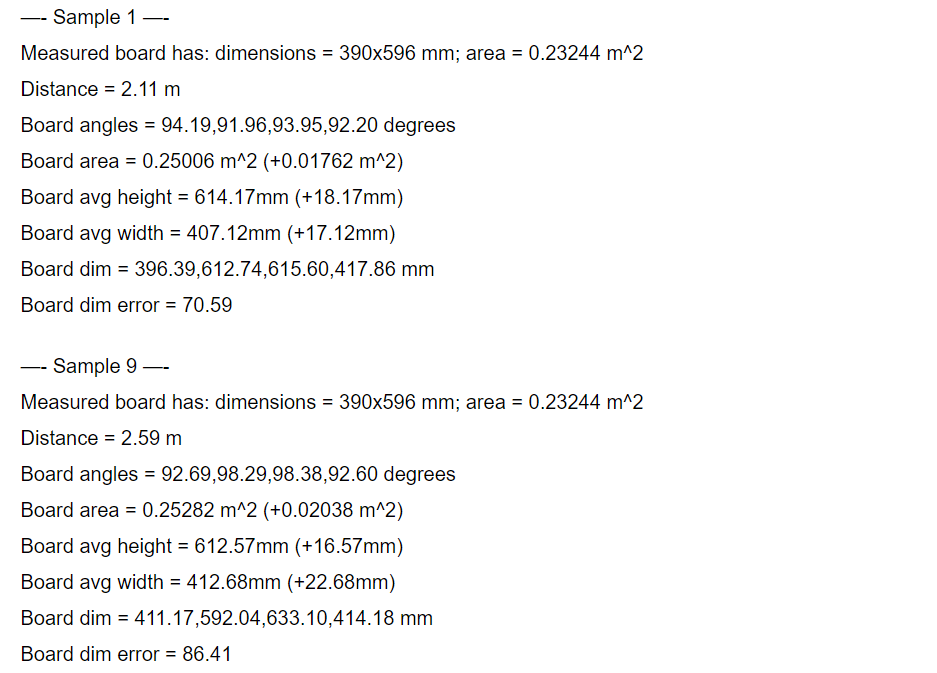
最好采集10个样本以上,再点击rviz中的optimise进行标定,在优化过程中将会在cam_lidar_calibration/data生成当前时间日期的文件夹,存放采集的图像、点云pcd、位姿,标定后camer和lidar外参文件。
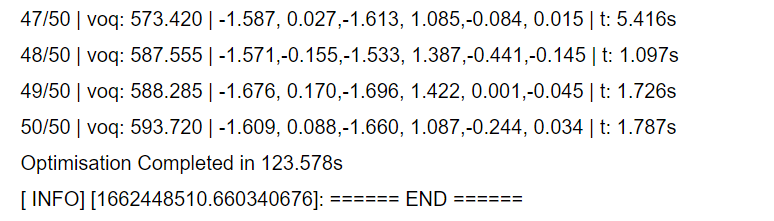
终端输出开始校准:
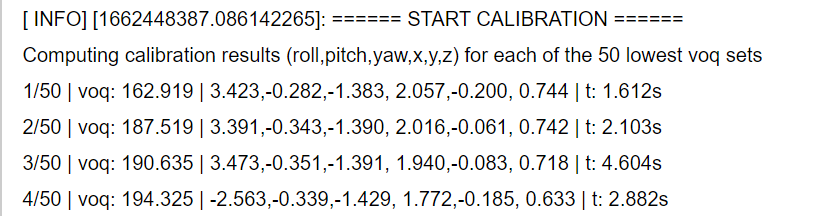
校准结束后输出:
评估参数和重投影误差:
roslaunch cam_lidar_calibration assess_results.launch csv:="$(rospack find cam_lidar_calibration)/data/2022-09-06_14-48-42/calibration_2022-09-06_15-13-07.csv" visualise:=true
注意这里默认加载第16个图像,如果没有那么大的标定样本,要修改launch文件中的加载序列
出现重投影效果图像
终端出现标定参数和重投影误差
审核编辑 :李倩
-
激光雷达是自动驾驶不可或缺的传感器2017-09-08 5344
-
常见激光雷达种类2017-09-25 13998
-
消费级激光雷达的起航2017-12-07 7483
-
激光雷达和相机之间的外参标定2019-04-12 6583
-
一种不依赖于棋盘格等辅助标定物体实现像素级相机和激光雷达自动标定的方法2021-09-01 2704
-
基于梯形棋盘格标定板对激光雷达和摄像机联合标定方法2017-11-30 1953
-
浅析自动驾驶基础之激光雷达2018-12-11 5908
-
Pandar64 64线机械式激光雷达产品手册免费下载2019-08-02 2596
-
如何制作ubuntu20.04的文件系统2022-10-17 4987
-
激光雷达相机外参标定相关内容2022-11-10 4741
-
什么是激光雷达 不同技术路线的激光雷达的优势2023-02-21 5430
-
激光雷达的不同技术路线:机械式、半固态(又叫混合固态)和固态2023-03-08 7328
-
镭神智能首款机械式激光雷达PoE系列震撼上市2023-12-02 1686
-
【北京迅为】iTOP-LS2K0500开发板快速使用编译环境ubuntu20.04第一章加载迅为提供 Ubuntu20.042024-09-18 1455
-
系统适配 | RK3576适配Ubuntu20.04正式发布2025-07-31 2428
全部0条评论

快来发表一下你的评论吧 !
