

SPC控制图为什么是±3σ
电子说
描述
SPC控制图就是一个预警系统,预警系统都存在两类风险:第一类风险是误报警风险(第一类错误)α,第二类风险是漏报警风险(第二类错误)β。
两类风险:
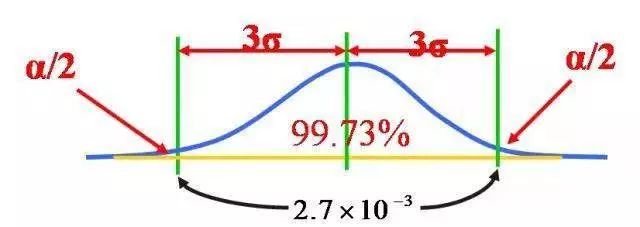
α风险:
即使过程时候处于受控状态,由于偶然原因也可能有某些点落在控制限之外,如果判断为异常,那么这个判断是错误的,其发生概率为α。在3σ方式下,α=0.27%。如下图所示:
β风险:
如果过程是异常,但也会有部分点位于控制界限内,如果抽取到这样的产品,就会被判断为正常,从而犯了第二类错误,即漏发警报。犯第二类错误的概率记为β。如下图所示:
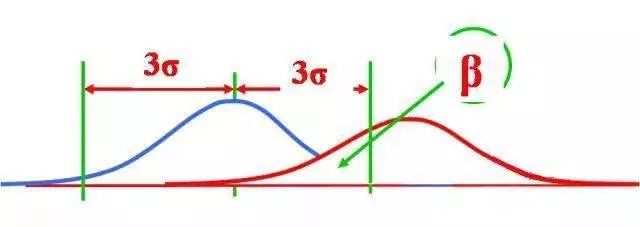
如何减少两类错误所造成的损失?调整UCL与LCL之间的距离可以增加或减少α和β。若此距离增加则α减少,β增大;反之则α,增大,β减少,请参考上述两个图。
举例
举例来说,我们按照μ±3σ的规则,如果发现数据点在μ±3σ之外,我们认为这个数据点是异常的,但我们这个判定是错误的概率是α,即0.27%,少于统计学中的5%的显著性水平。
一个解决方案是:根据使两种错误造成的总损失最小的原则来确定UCL与LCL二者之间的最优间隔距离。经验证明:休哈特所提出的3σ方式较好,在不少情况下, 3σ方式都接近最优间隔距离。
下图列出μ±nσ的1-α的概率。
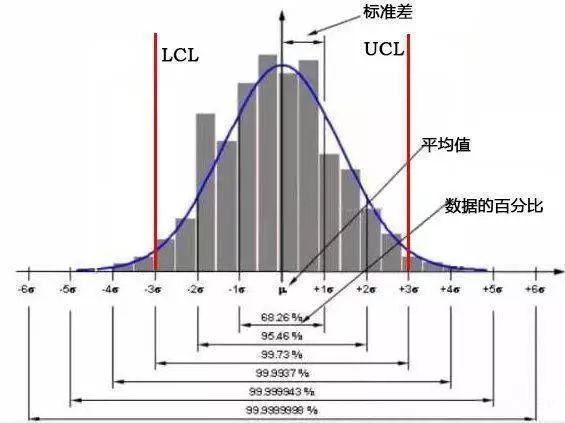
因为常规控制图的设计思想是先确定犯第一类错误的概率α,再确定犯第二类错误的概率β。
按照3σ方式确定CL、UCL、LCL就等于确定了α =0.27%;在统计中通常采用α=1%,5%,10%三级,但休哈特为了增加使用者的信心,把常规控制图的α取的特别的小,这样β就比较大,这就需要增加第二类判异准则,即便点在控制限内,但当点排列不随机也表示存在异常因素。
这就是为什么常规控制图的异常判定准则有两类,即:点超出控制限就判异和控制限内点排列不随机判异两类。
编辑:黄飞
- 相关推荐
- 热点推荐
- SPC
-
SPC56EL70L3/L5、SPC564L70L3/L5:汽车SIL3/ASILD底盘与安全应用的理想之选2026-04-16 350
-
探秘SPC56EL70L3/5、SPC564L70L3/5:汽车级32位微控制器的卓越之选2026-03-24 811
-
SPC56ELx/SPC564Lx系列32位微控制器深度解析2026-03-12 600
-
深入解析SPC56ELx/SPC564Lx系列微控制器:特性、参数与应用考量2026-02-11 675
-
SPC56ELx/SPC564Lx系列微控制器:汽车应用的理想之选2026-02-10 528
-
SPC控制图:告诉你生产过程质量波动的因素(SPC系统)2024-06-06 3489
-
一学就会的SPC2024-03-18 2412
-
控制图教程和示例2023-04-17 1646
-
SPC 之 I-MR 控制图2022-07-11 4115
-
全套MOXA系列串口设备在SPC系统中的应用2020-11-23 3022
-
F28035关于电机的控制图2018-04-04 1015
-
电气控制图册2016-01-20 938
-
SPC教材(PPT培圳资料)2009-07-30 943
-
电气控制图2008-08-19 1578
全部0条评论

快来发表一下你的评论吧 !
