

 3D 激光雷达SLAM软硬件技术结合,感知定位更全面
3D 激光雷达SLAM软硬件技术结合,感知定位更全面
描述
电子发烧友网报道(文/李宁远)SLAM,simultaneous localization and mapping,称为即时定位与地图构建,主要的作用是自动驾驶车辆或机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的地图特征定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。SLAM重要的理论与应用价值被认为是实现自动驾驶和全自主移动机器人的关键技术。
无人设备的迅速普及加速了SLAM行业发展,为了利用这些机会,技术供应商正在整合SLAM先进3D技术进行行业布局。作为国内激光雷达头部企业,镭神智能在SLAM技术和产品上布局已久。镭神智能受邀接受电子发烧友网采访,就SLAM技术相关问题交流分享了他们在SLAM技术和产品上的布局以及对SLAM行业的展望。
从3D激光雷达切入市场,革新2D激光雷达SLAM
粗略来说,实现 SLAM 需要两类技术。一类技术是传感器信号处理(包括前端处理),这类技术在很大程度上取决于所用的传感器。另一类技术是位姿图优化(包括后端处理),这类技术与传感器无关。所以说SLAM虽然是一项算法技术,但是应用SLAM的基础是性能优异的传感器(激光雷达或图像传感器)。根据传感器选择不同,目前有两个技术流派:视觉V-SLAM与激光雷达SLAM。

LX-3D SLAM盒子,镭神智能
激光雷达SLAM技术目前有2D激光SLAM和3D激光SLAM技术两种,2D激光SLAM受限于传感器性能,只能识别二维平面,不能适用于复杂的三维环境。基于多线激光雷达的3D SLAM定位技术,是目前全球最领先的3D SLAM定位导航技术,镭神智能布局的就是3D激光雷达SLAM。据镭神智能介绍,镭神智能多线激光雷达3D SLAM定位技术是以 3D 激光雷达为主传感器,通过对激光雷达、IMU、里程计、GPS等各类传感器进行数据融合处理,配置高性能处理器实现对无人车环境的建图以及匹配定位功能。
3D激光雷达SLAM结合配套的以太网通信开发接口,可以使各种应用场景类的低速无人车、机器人、无人叉车、AGV等低速智能移动载体在复杂的三维环境中达到精确定位需求。
软硬件相结合,凸显SLAM技术优势
相较于大部分厂商只能从激光SLAM算法上切入市场,传感器厂商自己做SLAM优势往往会更大一些,这样不仅能提供导航算法还有与之匹配的高性能硬件。目前很多视觉传感器厂商、激光雷达厂商都自研SLAM,集合传感器向中游厂商提供整体方案,做差异化竞争。软硬件两手抓的厂商在SLAM技术上会更具优势。
SLAM技术最直观地体现在点云建图上,一般来说,首先通过点云匹配来连续估计移动。然后,使用计算得出的移动数据(移动距离)进行车辆定位。对于激光点云匹配,会使用迭代最近点和正态分布变换等配准算法。二维或三维点云地图可以用栅格地图或体素地图表示。多线激光雷达3D SLAM技术理论上可以构建百万平米的超大场景3D点云地图,且感知的环境信息特征丰富,定位匹配稳定,适用于绝大部分场景。为什么说是理论上呢,因为前提是传感器性能足够好能够生成密集点云。
根据镭神智能给出的传感器配置,16线3D激光雷达,采用了领先的核心信号处理ASIC芯片和先进的多次回波检测技术、数据校准技术,点云输出能到32万点/秒,这是目前整个行业内领先的点云性能。这种级别的构图在算法加持下室外测量精度能到±3cm,室内测量精度到±2cm。
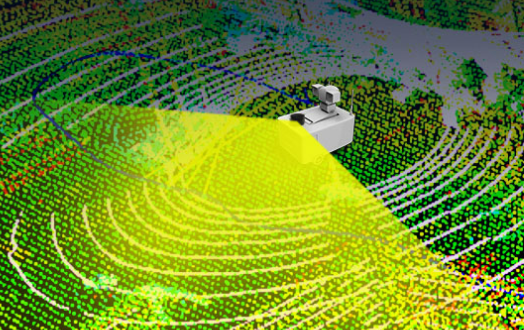
3D SLAM算法加融合定位,镭神智能
从传感器角度来说,就密度而言激光点云是不如图像精细的,不能保证足够的特征用于匹配,这也是为什么会额外搭载IMU、里程计、GPS等各类传感器进行数据融合处理。
镭神智能也分析了终端用户在SLAM上的投入产出比,“搭载镭神智能多线激光雷达3D SLAM技术的整套无人叉车系统,其中3D激光雷达传感器套件+3D SLAM算法系统仅需2.8万元,整套3D SLAM无人叉车成本仅需十几万”。成本问题一直是困扰激光雷达SLAM大规模应用的阻碍,这也是很多激光雷达厂商自研SLAM的原因之一。
主控芯片从FPGA、MCU逐渐转向激光雷达厂商自研SoC,以SoC+SLAM算法整体打包给下游厂商,这会让厂商在成本控制上更有优势。而且像镭神智能这样的激光雷达厂商已具备激光雷达专用芯片、激光雷达光纤激光器及核心关键器件自研自产能力,并掌握了半导体封装技术,更有助于激光雷达整机价格下探。
激光雷达SLAM VS V-SLAM
有关激光雷达SLAM和V-SLAM两种流派的争论已经持续了很多年,每个技术路线的拥趸都认为各自坚持的技术路线有不可替代的优势。但目前不可否认的事实是V-SLAM尽管话题度很热,但事实上真正落地应用的视觉方案,并没有激光SLAM落地的数量多。以机器人公司为例,大多数公司采取的是多种类型的混合导航技术,例如视觉传感搭配激光SLAM进行工作,以此进行优势互补,但混合导航中的视觉SLAM的实际作用难以考证。
从软件算法和硬件层面来看,目前激光雷达3D SLAM都比V-SLAM更成熟,激光雷达3D SLAM对于环境适应性更强,不受光线影响,室内室外均可使用,具备规模化应用基础。而V-SLAM要依托于摄像头,受限于视觉传感器对环境光线干扰大,白天光线太强或者晚上黑暗环境都无法使用,也很难提取环境特征,对算法要求高,处理器资源难以满足,探测距离相比之下更短。
镭神智能认为“激光雷达3D SLAM技术必然是未来的发展趋势,大部分场景下多线激光slam 融合RTk IMU里程计已经足够,加视觉反而累赘。此前会有V-SLAM的技术方向是因为摄像头成本低,但是随着激光雷达成本的优化和价格逐步下探,以及算法和应用更成熟,V-SLAM成本优势也不会再那么明显”。
写在最后
无人设备的迅速普及推动了SLAM市场的快速增长,3D SLAM的崛起也成了全球SLAM技术的重要发展趋势,成本不断下探的3D激光雷达SLAM正迅速成为定位导航的主流方向。随着计算机处理速度的显著提高,以及更低成本传感器的应用,这项技术正被广泛应用于从AR到机器人到自动驾驶各个领域,并更新2D SLAM技术相关应用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 5542
-
常见激光雷达种类2017-09-25 14032
-
激光雷达究竟为什么这么牛,这么贵2017-10-16 7156
-
激光雷达除了可以激光测距外,还可以怎么应用?2018-05-11 6124
-
5 款激光雷达:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-1282018-07-26 6091
-
AGV激光雷达SLAM定位导航技术2018-11-09 10101
-
除了机器人行业,激光雷达还能应用于哪些领域?2018-12-10 4927
-
自制低成本3d激光扫描测距仪激光雷达2020-05-27 4628
-
自制低成本3D激光扫描测距仪(3D激光雷达)2021-03-04 7009
-
当“思岚”激光雷达邂逅盲人拐杖2021-11-12 4125
-
3D激光雷达SLAM技术的应用趋势2022-03-21 6534
-
3D 激光雷达SLAM软硬件技术结合,感知定位更全面2022-11-21 2405
-
什么是激光雷达3D SLAM技术?2023-11-25 2542
-
激光雷达在SLAM算法中的应用综述2024-11-12 3986
-
什么是激光雷达 3D SLAM技术?2025-12-02 931
全部0条评论

快来发表一下你的评论吧 !
