

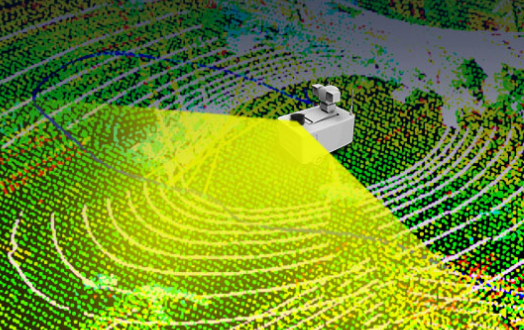
3D 激光雷达SLAM软硬件技术结合,感知定位更全面
电子说
1.4w人已加入
描述
从3D激光雷达切入市场,革新2D激光雷达SLAM

软硬件相结合,凸显SLAM技术优势
3D SLAM算法加融合定位,镭神智能
激光雷达SLAM VS V-SLAM
写在最后


更多热点文章阅读
亚马逊拟评估砍掉Alexa业务,智能音箱吹的牛,永远无法实现了? 芯片江湖防骗指南 中芯国际最新财报,扣非净利润同比增长超100%!资本支出增至456.0 亿元 赛微电子6亿收购受阻,中资海外并购难度骤升 歌尔股份丢失苹果33亿订单,“果链”依赖成隐忧?
原文标题:3D 激光雷达SLAM软硬件技术结合,感知定位更全面
文章出处:【微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 电子发烧友网
-
浅析自动驾驶发展趋势,激光雷达是未来?2017-09-06 5540
-
常见激光雷达种类2017-09-25 14027
-
激光雷达究竟为什么这么牛,这么贵2017-10-16 7156
-
激光雷达除了可以激光测距外,还可以怎么应用?2018-05-11 6124
-
5 款激光雷达:iDAR、高清3D LiDARInnovizPro、S3、SLAM on Chip、VLS-1282018-07-26 6090
-
AGV激光雷达SLAM定位导航技术2018-11-09 10100
-
除了机器人行业,激光雷达还能应用于哪些领域?2018-12-10 4925
-
自制低成本3d激光扫描测距仪激光雷达2020-05-27 4627
-
自制低成本3D激光扫描测距仪(3D激光雷达)2021-03-04 7007
-
当“思岚”激光雷达邂逅盲人拐杖2021-11-12 4122
-
3D激光雷达SLAM技术的应用趋势2022-03-21 6531
-
3D 激光雷达SLAM软硬件技术结合,感知定位更全面2022-11-20 5942
-
什么是激光雷达3D SLAM技术?2023-11-25 2540
-
激光雷达在SLAM算法中的应用综述2024-11-12 3982
-
什么是激光雷达 3D SLAM技术?2025-12-02 925
全部0条评论

快来发表一下你的评论吧 !
