

大挠度弯曲的三角形悬臂梁MEMS探针设计
MEMS/传感技术
描述
据麦姆斯咨询报道,近日,法国里尔大学(University of Lille)的Steve Arscott在Scientific Reports期刊上发表了题为“Skate, overtravel, and contact force of tilted triangular cantilevers for microcantilever-based MEMS probe technologies”的最新论文,提出了一种描述大挠度弯曲的三角形悬臂梁的滑行、超行程、接触力之间关系的可扩展模型,为实现锥形MEMS探针的零滑行提供了可行的解决方案,对参与片上测试的探针工程师和MEMS探针的设计者具有一定的指导意义。
微小的可变形微加工芯片边缘微悬臂梁对于各种表面探测技术都非常有用。例如,它们是近场显微术的关键元素,在近场显微术中,它们在小挠度状态下的力学行为被很好的理解和记录,这对于结果的解释非常重要。近场显微术中使用的这种悬臂梁的探针挠度是以纳米为单位计算的,这与它们的长度(通常为几十和几百微米)相比非常小。相比之下,如果微悬臂梁被用作其他微型探测技术的载体,例如新兴的微型电测试探针,则其挠度可能会稍高,例如,由于实现低电阻接触可能需要更大的接触力。
图1a–c给出了使用硅微技术制造的MEMS电探针示例,该技术可以制造出微米厚的长悬臂梁。对于此类探针,其弯曲可能会使其进入大挠度配置,在这种配置中,其力学性能的理解和记录较少。在大挠度情况下,探针尖端挠度可能高达悬臂梁长度的一半。与表面接触的倾斜微悬臂探针被施加称为“超行程”的垂直运动时会发生力学变形。这种弯曲的结果是(i)尖端的横向运动穿过被称为“滑行”的接触面,(ii)尖端和表面之间产生接触力(见图1d)。
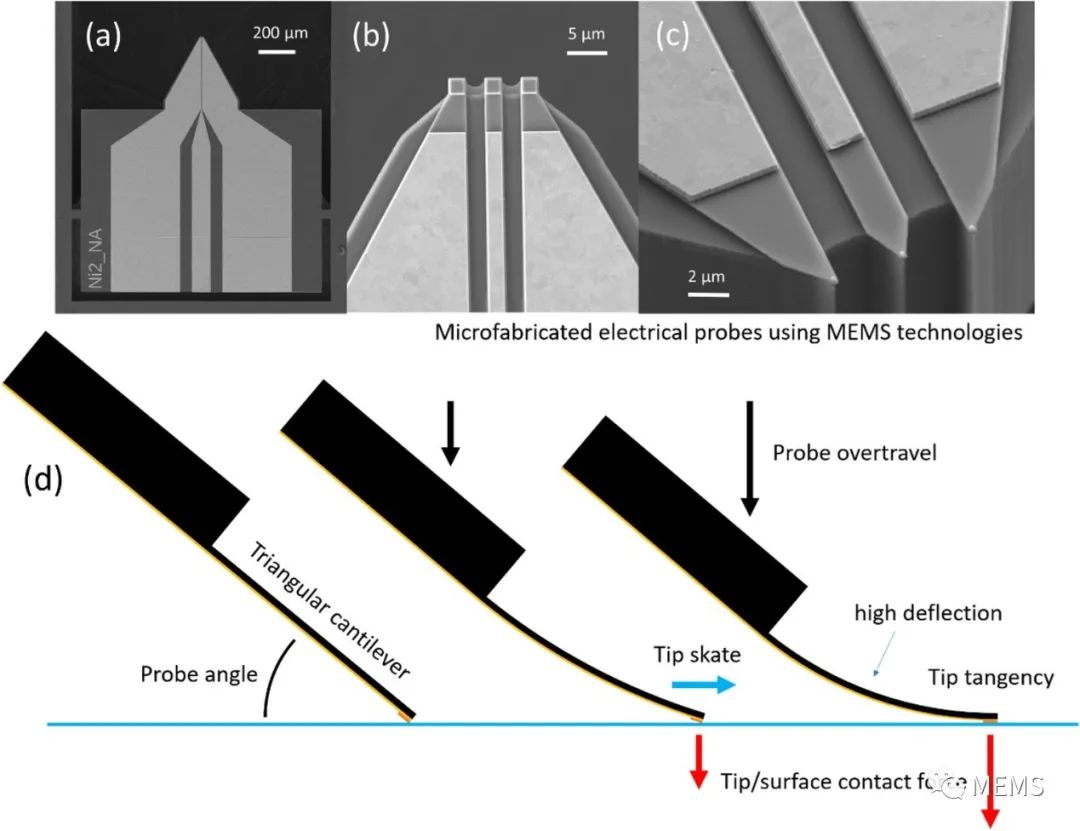
图1 MEMS微加工技术制造的含有微悬臂梁的电探针
超行程、滑行和接触力之间的关系取决于悬臂梁的形状和刚度,以及悬臂梁相对于下表面的倾斜角度。对于处于小挠度状态下的悬臂梁,人们已经探讨了这种关系。对于大挠度下的矩形悬臂梁,本文作者也对其关系进行了描述。相比之下,平面、锥形三角形微悬臂梁更适合于片上测试,因为它们易于定位,并且锥形结构可以将宽的低电阻轨道传递到小的尖端触点——这在图1a-c中很明显;例如,图1c中的金触点为200nm × 200nm。
滑行、超行程和倾斜悬臂梁/表面的接触力之间的关系取决于悬臂梁的弯曲,而悬臂梁的弯曲又取决于其特定形状。平面、锥形三角形悬臂梁与矩形悬臂梁的挠度不同,这意味着超行程/滑行/接触力之间的关系将不同。本文描述并研究了平面三角形悬臂梁的滑行、超行程和接触力之间的关系。在电探针中,接触力是一个重要的参数,因为它在一定程度上决定了金属对金属电触点的质量。
弯曲悬臂梁上产生的表面应力也很重要,因为它将控制探针的最大可施加的超行程——超过这个限度,探针就可能失效。在一些应用中,探针尖端/表面相切也可能具有一定的重要性,以使位于探针尖端的任何金属触点与下层接触面平行——随着接触力的变化,这种几何形状也可能影响探针可实现的最小接触电阻。通过超行程补偿实现零滑行的想法也适用于三角形悬臂梁——研究结果为这一问题指出了一个实用的解决方案。能够预测上述问题对于大挠度弯曲下工作的MEMS探针工程师来说非常重要,这也是本文的目标。
基于此,本文提出了一种可扩展的模型,可用于描述倾斜三角形悬臂梁中滑行、超行程和产生的尖端接触力之间的关系,其中悬臂梁以高挠度弯曲并与平坦表面接触。利用宏观三角形悬臂梁(由聚苯乙烯板材制造)对模型进行了实验测试,实验结果与所提出的模型吻合良好。有趣的是,与矩形悬臂梁相比,实现三角形悬臂梁的超行程/滑行相切条件所需的超行程更少,这是由于三角形悬臂梁的圆弧形弯曲(而不是矩形悬臂梁的三次多项式弯曲)造成的。这对超行程/尖端与表面接触力之间的关系有影响。通过实验发现,滑行/超行程之间的关系与三角形底边宽度无关,这在0.12至0.74的b/L范围内(即从强等腰到准等边)得到了实验验证。这意味着三角形悬臂梁的滑行/超行程关系与悬臂梁的刚度无关。接触力和尖端处的集中负载力(这会导致大挠度下的弯曲)之间存在关系。测得的尖端/表面接触力作为三角形悬臂梁底边宽度的函数线性增加。接触力取决于三角形的底边宽度。三角形悬臂梁的弯曲意味着底边处没有应力集中,这与矩形悬臂梁的情况不同;就未来微悬臂梁的鲁棒性而言,这可能是一个优势。由于圆弧形弯曲,三角形悬臂梁中的相切条件比具有相同长度的矩形悬臂梁更早达到(即超行程较小)——这在电接触方面可能是一个优势。这些发现也为在锥形MEMS探针中实现零滑行提供了实用的解决方案。终上所述,关于大挠度倾斜三角形悬臂梁的超行程、滑行和尖端与表面接触力之间的相互作用的研究结果,对于使用微技术制造的、在大挠度弯曲下工作的新兴MEMS微悬臂梁探针技术可能具有重要意义。
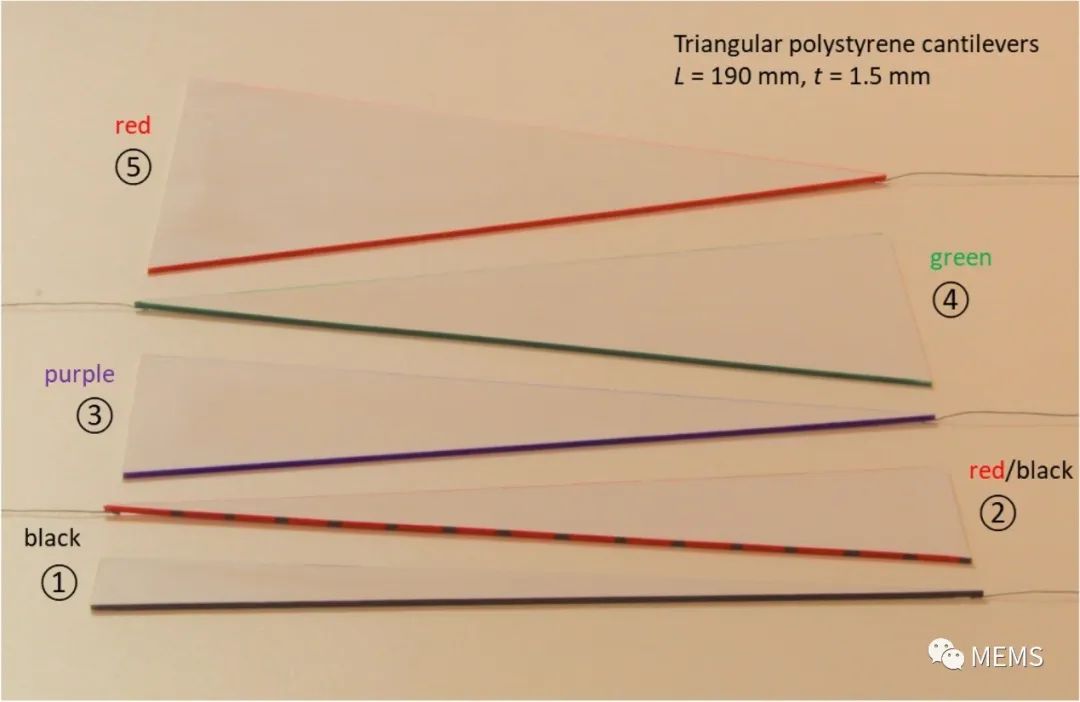
图2 制造的五根平面三角形宏观悬臂梁
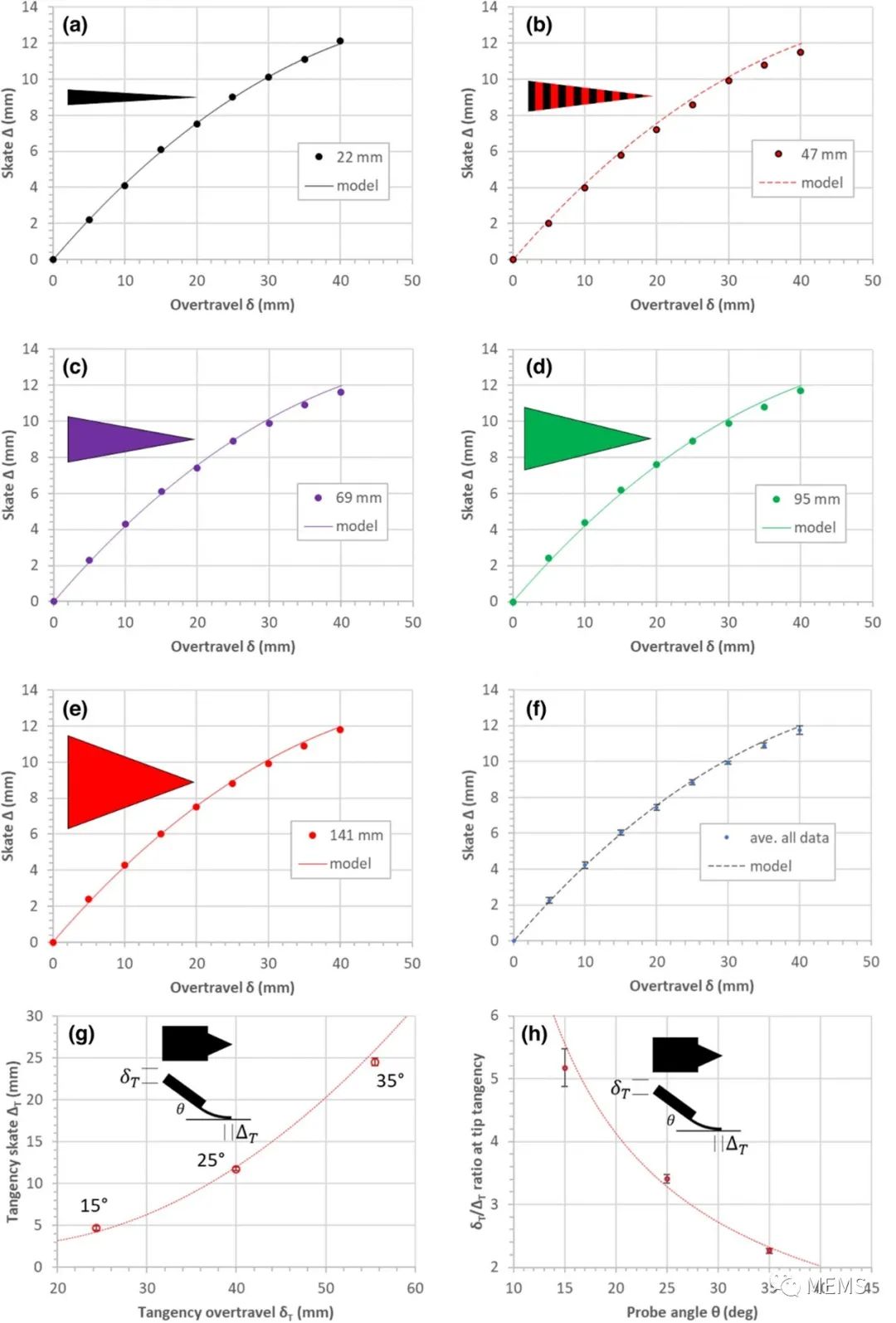
图3 三角形悬臂梁的滑行/超行程实验结果
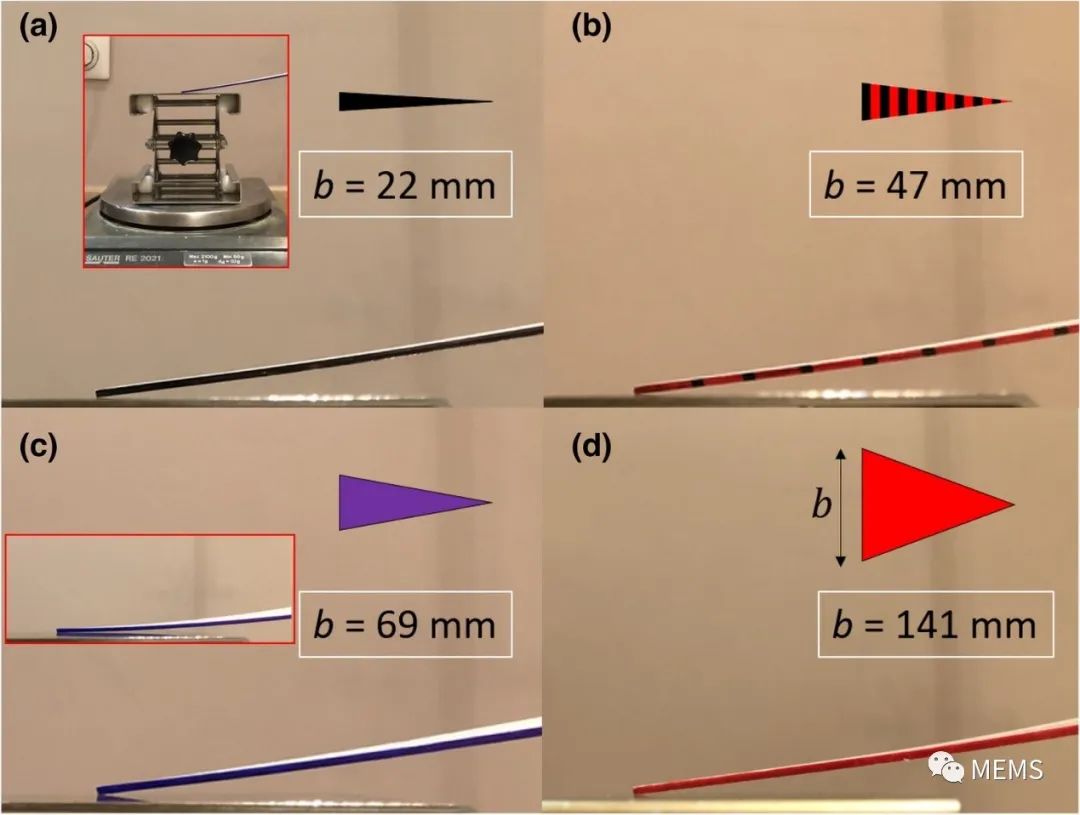
图4 接触力与超行程关系实验
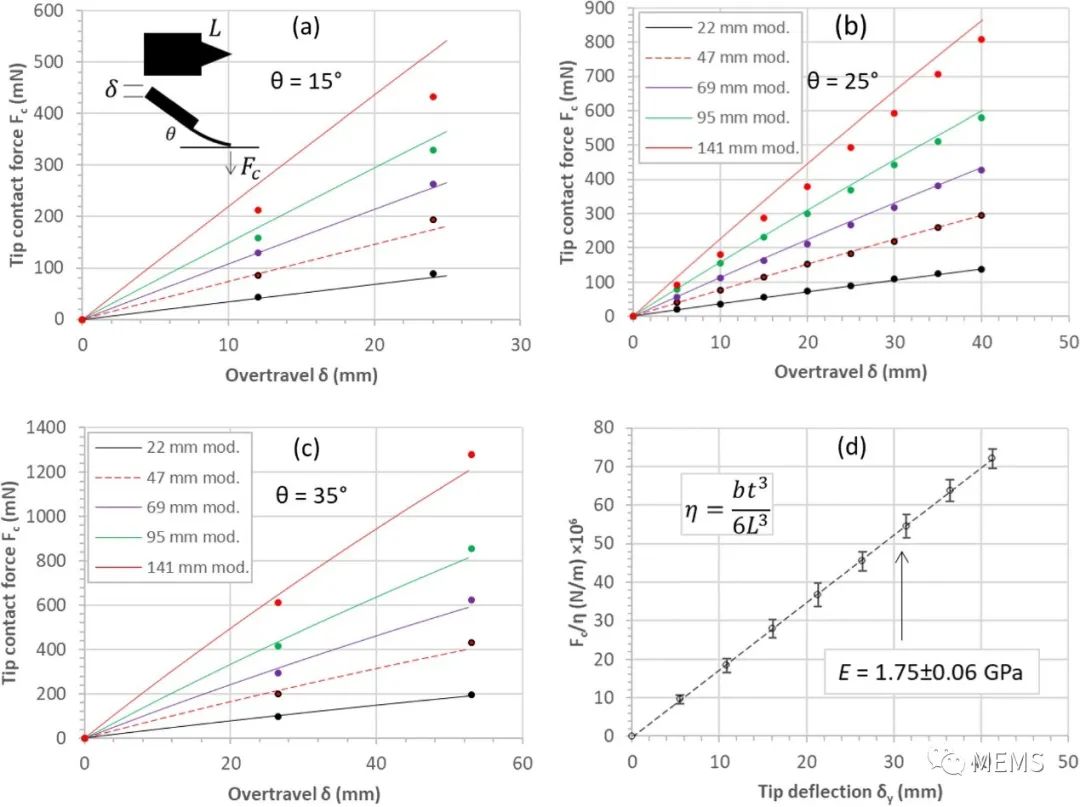
图5 接触力与超行程关系实验结果
论文信息:https://doi.org/10.1038/s41598-022-23973-5
编辑:黄飞
- 相关推荐
- 热点推荐
- mems
-
交流电三角形接法电流关系2023-12-13 8665
-
三角形和星形电机参数怎么确定?2024-03-07 16949
-
三角形网格球面参数化研究2010-04-24 2524
-
三角形栅格矩形径向线螺旋阵列天线的设计与实验研究2009-10-27 1144
-
三相负载三角形连接2008-09-24 32284
-
宏三角形2009-03-02 1404
-
三相负载的三角形连接方法2010-04-15 16944
-
星形/三角形的变换法介绍2021-05-15 35369
-
Shell脚本之打印一个正三角形2022-10-24 3354
-
LTspice:生成三角形和锯齿波2023-01-06 19512
-
三角形接法的作用2023-04-03 5244
-
三角形绕组的两种连线方式介绍2023-11-21 4163
-
变压器“三角形接线”和“星形接线”接法详解2024-02-18 23942
-
三角形连接和星形连接的基本概念和特点2024-07-17 9070
-
什么是三相电机三角形接法?定义是什么?2024-10-23 7232
全部0条评论

快来发表一下你的评论吧 !
