

异步电机混合模型转子磁链观测器学习
工业控制
描述
导读:本期文章主要介绍混合模型转子磁链观测器,其利用电流型磁链观测器在低速区域的观测优势和电压型磁链观测器在中、高速区域的观测优势实现在全速范围内较为准确的估算转子磁链。
一、引言
调速系统中的电机控制技术的最根本的目的实现转矩精准、迅速的控制。以矢量控制的概念为基础,达到对电机的磁链、转矩分别控制的目的前提是转子的磁场定向控制系统需要通过控制定子电流的励磁分量使得转子磁链幅值恒定,而后由控制定子电流转矩分量来实现调节转矩以及实现控制调节转速的目的。为了实现这一目标,就必须获得较为精准的转子磁链的幅值和空间位置信息, 在实用中通常使用磁链观测这一手段来实现。磁链观测器应实现两个目标:一是获得精确的转子磁链幅值;二则需要确保转子磁场定向的准确性,从而获得实时的磁链空间位置角度以用于坐标变换。
观测异步电机转子磁链的基本方法有两种:电流模型法和电压模型法。电流型转子磁链观测通过定子电流和电机转速来计算转子磁链;而电压模型则通过定子电压和定子电流进行计算,需要对电机的反电动势进行积分。电流型方法中由于需要实时转速信息和转子时间常数的不稳定性,故通常适用于低速情况,而电压型观测方法则不需要转速信息,更适合中、 高速以及无速度传感应用场合,但纯积分环节则会带来的零点漂移和初值问题,且低速时下定子电阻压降会造成观测 结果的误差; 本文为了克服两种观测模型在高、 低速应用场合的缺点,结合二者在不同速度场合的特点和实用性,介绍了电压-电流混合模型进行转子磁链观测器。
二、混合模型转子磁链观测器介绍
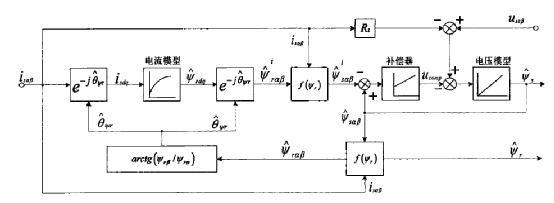
图1 混合模型磁链观测器控制框图
由图1 混合模型磁链观测器控制框图可知,混合模型由PI调节器连接电流模型和电压模型磁链观测器组成。
在两相静止坐标系下,定子磁链的两个分量调节器参 数相同,采用PI控制器进行电压模型补偿后,电压-电流 混合模型闭环磁链观测器的简化框图如图2所示。
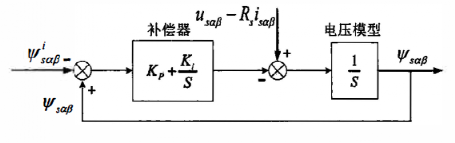
图2 混合模型磁链观测器的简化框图

混合模型磁链观测器的输出合成的转子磁链是电压模型和电流模型按一定比例合成的,其中权重系数是观测器的特征函数。合理设计PI补偿控制来实现电流、电压模型之间的平滑切换时设计的重点。可以看到在电机零速时,电压模型的输入值是电流模型的计算值,从而解决的电压模型的积分初始值设定的问题。用PI控制器补偿电压解决了电压 模型在低速时受到定子电阻参数误差影响较大的问题和纯积分环节的零漂问题。
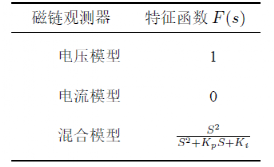
图3 不同转子磁链观测器的特征函数
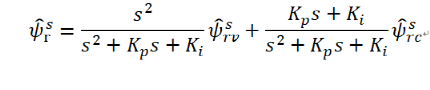
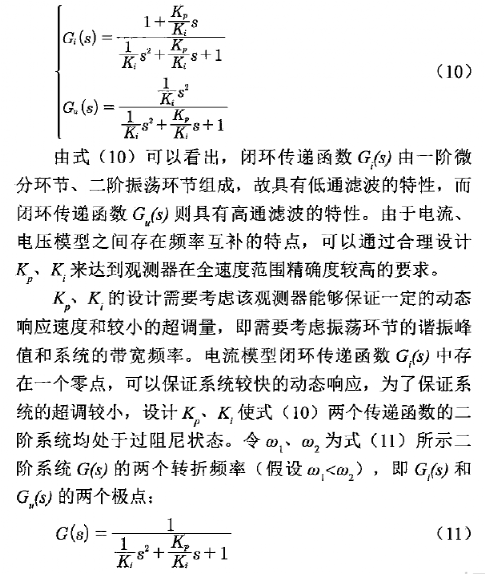
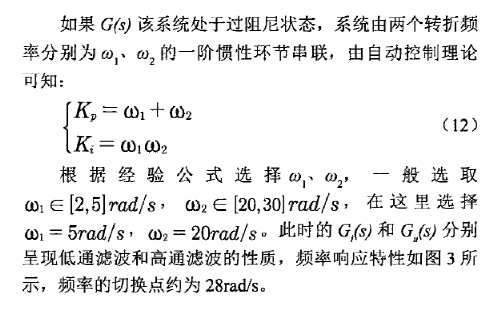
将混合模型的特征函数代入到统一特性方程中,得到如下公式:
三、混合模型转子磁链观测器仿真模型搭建
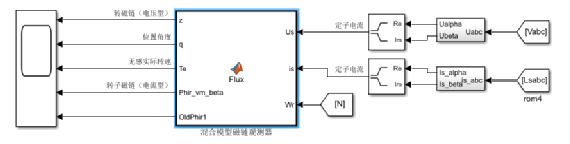
图4 混合模型磁链观测器系统仿真
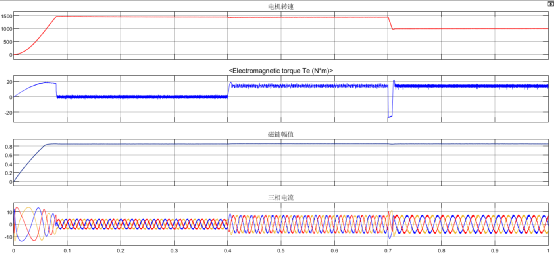
图5 异步电机矢量控制仿真波形变化情况
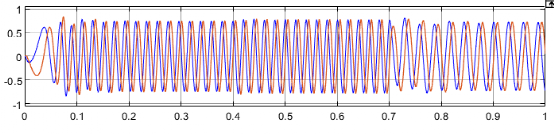
图6 混合模型磁链观测器磁链估计变化情况
从图6可以发现,在改变转速和突然加载的情况下,混合模型磁链观测器都能准确的估算出转子磁链。
四、总结
电流型磁链观测器的在低速时能够得到较为精确的转子磁链观测值,而随着速度的增加,观测器受到电机参数的影响越来越大,观测误差也越大,已经不能正常工作;而电压型磁链观测器在低速时受到定子电阻压降的影响较大,不能得到精确的转子磁链,随着系统速度的增加,定子电阻压降的影响将会越来越小,观测器能够得到较为精确的转子磁链观测值;混合模型磁链观测器在低速和高速情况下,都能得到较为精确的转子磁链观测值,而且在观测器模型切换和电压补偿时 没有出现明显的振荡。本文结合电压型、电流型转子磁链观测器的优缺点,介绍了混合模型转子磁链观测器,通过电流模型得到的观测结果对电压模型进行修正,从而在保留了电压型磁链观测器高速性能优良的基础上,优化了观测器在低速情况下的性能,保证混合模型磁链观测器在电机全速范围均能达到较好的观测结果,确保整个系统的稳定性,仿真结果证明了此方案的可行性。
-
显著改善异步电机动态性能的磁链观测方法2025-07-15 396
-
两种感应电机磁链观测器的参数敏感性研究2025-06-09 368
-
基于全阶模型磁链观测器的异步电机矢量控制2023-11-09 3333
-
异步电机的改进型电压模型磁链观测器介绍2023-08-19 3585
-
异步电机速度估计-混合模型磁链观测器法2023-05-18 2277
-
基于电流型磁链观测器的异步电机矢量控制学习2023-03-30 947
-
异步电机控制笔记2023-03-29 1206
-
基于电压型磁链观测器的异步电机矢量控制学习2023-01-29 2949
-
全阶模型磁链观测器学习2022-11-08 7252
-
磁链观测器在异步电机矢量控制中的应用2022-09-06 3708
-
异步电机无感控制中,观测器在观测磁链时需要用到转速信息,而在速度估计时有需要用到磁链的信息,这样不矛盾吗?2019-05-21 3940
-
异步电机全阶磁链观测器反馈矩阵设计_邓歆2017-01-08 931
-
基于定子磁链模型的异步电机转子时间常数辨识2017-01-07 906
全部0条评论

快来发表一下你的评论吧 !
