

三菱运动控制指令PLSY、PLSR、PLSV的使用说明
电子说
描述
前面我们讲述了三菱运动控制指令PLSY、PLSR、PLSV的使用说明,其实在实际中最实用的还是DRVI和DRVA指令,新手在刚接触这两个指令时很容易混淆,不知道他们的区别是什么,今天就来说说。
在三菱plc定位功能中,采用目标位置设定方式不同的相对定位(DRVI)指令和绝对定位(DRVA)指令, 进行单速定位。相对定位(DRVI)的目标位置设定方式采用相对地址的位置即增量式,绝对定位(DRVA)的目标位置设定方式采用绝对地址的位置即绝对量式。(听起来很绕口)
首先我们需要了解的是增量式和绝对量。。
所谓的增量式就是以当前停止的位置作为起点,指定移动方向和移动量进行定位,简单来说就是以我现在停的地方作为起点你指定我向哪个方向走多少我就走多少,比如输入500,就向前走500,输入-1000,就往后退1000。
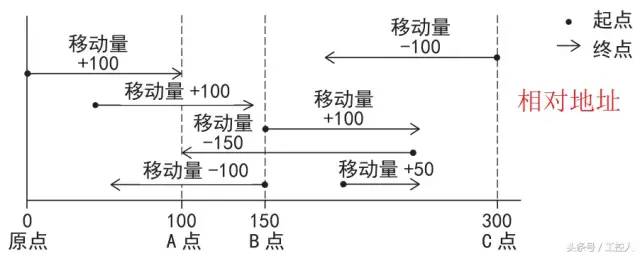
增量方式
所谓的绝对方式就是以原点为基准指定位置(绝对地址)进行定位,起点在哪里都没有关系,就是说与现在我停在哪地方无关,只与原点做比较,比如我现在在100的位置,我们输入100,是不会动的,输入500,会向前走400,输入-500,会向后退600,因为只和原点做比较,现在在100的位置,输入100与原点比较无变化,输入500,源原点做比较还差400,所以往前走400,输入-500,与原点比较,发现不仅要走100回到原点还要往回再走500加起来就是600。
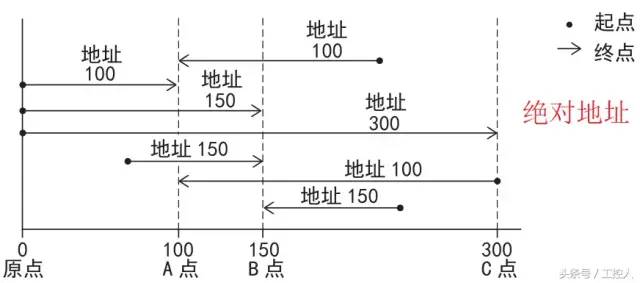
绝对方式
现在明白它们的区别了吗,相对位置是多少就走多少,绝对位置是一个位置数据,它走多少和走的方向要计算现在的位置与绝对位置之间的距离差。通俗的将就是,一个指定距离,一个指定目的。两个指令都带有加减速时间、基底、最高速度设置,而且都有脉冲发送完成标志位M8029,其他的相关软元件与PLSV类似。
这里主要强调下旋转方向的变换,对于DRVI,当脉冲输出值(相对地址)为正数时正转,脉冲寄存器的脉冲当前值增加,当脉冲输出值为负时反转,脉冲寄存器的脉冲当前值减少,比如设置脉冲输出数为10000,则电机正转,脉冲输出数为-5000时反转。
对于DRVA,它的正反转需要由脉冲输出值(绝对地址)与当前寄存器中的大小做比较,比如当前寄存器为1000,我们设置脉冲输出数为4000,则电机正转,如果设置脉冲输出数为500,则电机反转。
审核编辑:郭婷
-
三菱PLC PLSV(可变速脉冲输出指令)在软件中如何使用?2025-04-10 14492
-
三菱PLC常用指令说明2024-12-26 11846
-
三菱PLCfx3U主控指令使用2024-06-20 6203
-
三菱FX系列PLC置位与复位指令的使用教程2023-12-26 8742
-
三菱和西门子PLC区别及优势分析2023-10-26 5675
-
三菱PLC指令2023-04-19 700
-
5种PLC运动控制指令的区别#三菱plc从入门到精通 #硬声创作季电子知识科普 2022-10-16
-
三菱plc与西门子plc编程有什么不同?2021-12-21 6910
-
LabVIEW和三菱FXPLC编程协议及使用说明2018-06-04 1787
-
三菱FX系列PLC编程实例视频教程全集part9(81-90集)2012-09-26 6057
-
三菱plc指令说明书2008-11-21 3116
全部0条评论

快来发表一下你的评论吧 !
