

CAN FD协议及其与CAN2.0的异同
接口/总线/驱动
描述
1. CANFD的来历
我们知道了, CAN2.0数据段只有8byte,最高速率为 1Mbit/s,通常使用的是 500k,随着功能的逐渐增多,各 ECU 之间的信息交互也越多,导致总线负载持续走高;CAN 报文中只有约 40~50%的带宽用于实际数据传输;响应机制受车内布线的物理特性限制,例如 CAN 控制器中的 ACK 生成延迟;收发器传播延迟;导线延迟等,然而随着汽车功能越来越多,CAN总线的局限性也逐渐暴露:
为了解决上诉CAN总线的局限性,对其进行升级时必不可少的,从而有了CAN FD,其全称为CAN with Flexible Data rate。2011年,开始CAN FD协议的开发,2015年ISO11898-1进行了修订,将CAN FD加入其中。
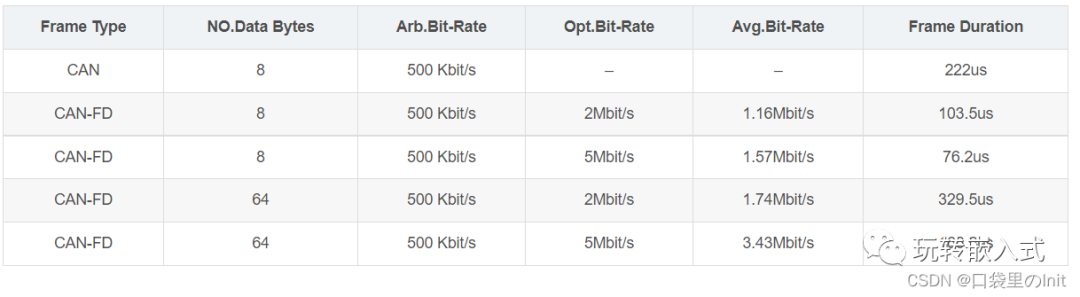
CAN与CAN-FD性能对比:
2. CANFD与CAN的协议异同
在完全理解了CAN协议后,我们只需要对比CANFD与其的不同就可以比较简单的熟悉CANFD协议,那相对于CAN,CAN FD有什么不同呢?
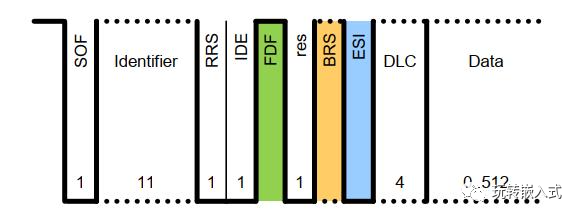
(1)传输速率不同。
CAN FD的速率可变,从控制场中的BRS位到ACK场之前(含CRC分界符)为可变速率,最高速率可达到8Mbps(下图的蓝色部分)。其他部分与CAN相同。
(2)数据长度不同。
CAN FD支持的最大数据长度为64byte。
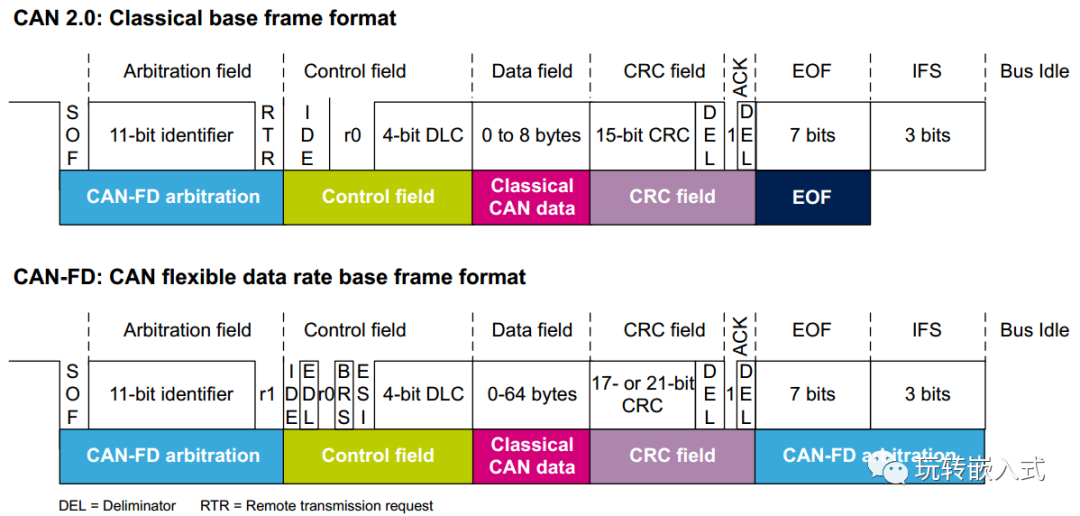
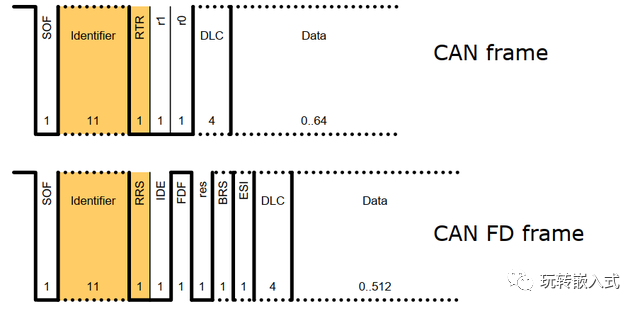
(3)帧格式不同。
CanFD新增了FDF、BRS、ESI位:
FDF:表示 CAN 报文还是 CAN-FD 报文;BRS:表示位速率转换,该位隐性时,速率可变(即 BSR 到 CRC 使用转换速率传输),该位为显性时,以正常的 CAN-FD 总线速率传输(恒定速率);ESI:表示发送节点状态。
(4)ID长度不同。
CAN FD标准帧ID长度可扩展至12bit,CAN的标准帧ID为11bit。
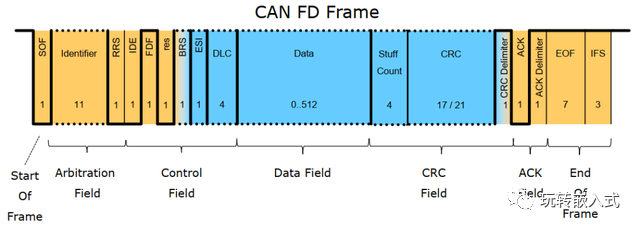
3. CANFD帧结构解析
CAN FD节点可以正常收发CAN报文,但CAN节点不能正确收发CAN FD报文,因为其帧格式不一致。
CAN FD的帧结构是什么呢?
与CAN一样,CAN FD一共具有,帧起始SOF,仲裁段,控制段,数据域,CRC域,ACK域,帧结束,共七个部分组成。
3.1 帧起始
CAN与CANFD使用相同的SOF标志位来标志报文的起始。帧起始由1个显性位构成,标志着报文的开始,并在总线上起着同步作用。
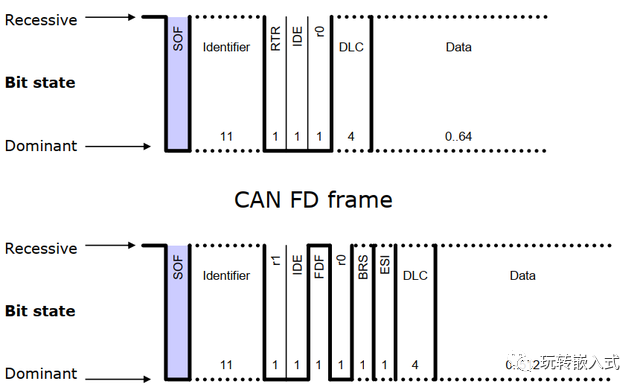
3.2.仲裁域
与CAN不同,CAN FD取消了对远程帧的支持,用RRS位替换了RTR位,为常显性。IDE用于区分标准帧和扩展帧。
3.3 控制域
CANFD与CAN有着相同的IDE,res,DLC位。同时增加了FDF、BRS、ESI三个bit位。FDF为隐性时,表示为CAN FD报文;
BRS为为速率转换开发,当其隐性时,速率可变,当其显性时,以正常的CAN-FD总线速率传输(恒定速率);
ESI用于表示错误状态,主动错误发送显性位,被动错误发送隐性位。
3.4 数据域
CAN FD兼容CAN的数据格式,同时最大还能支持12, 16, 20, 24, 32, 48, 64byte。

3.5 CRC
CAN FD对CRC算法进行了改进,CRC对填充位也加入了计算。在校验和部分为避免有连续位超过6个,就确定在第一位以及以后每4位添加一个填充位加以分割,这个填充位的值是上一位的反码,作为格式检查,如果填充位不是上一位的反码,就作出错处理。CAN FD的CRC场扩展到了21位。
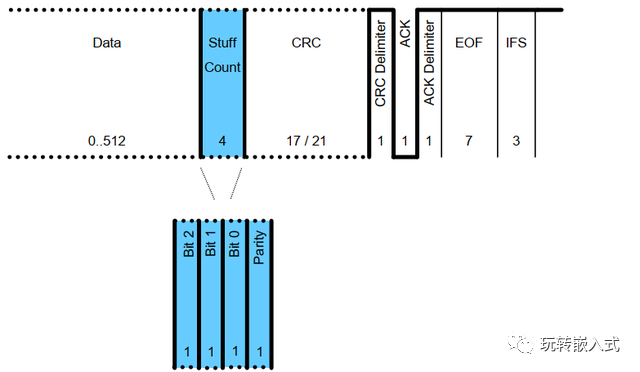
3.6 ACK
ACK紧跟着CRC结束标识位。不同的是,CAN FD支持2bits的ACK的识别。
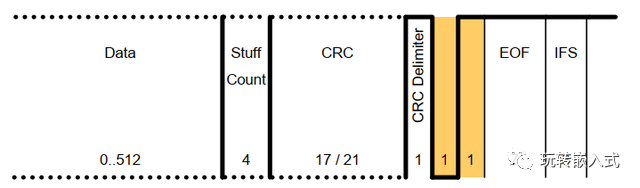
3.7 帧结尾
与CAN一样,CAN FD的帧结尾也为连续7位的隐性位。
审核编辑:汤梓红
-
CAN FD的波特率到底能跑多快?2018-09-17 17065
-
浅谈CAN FD总线协议帧格式2022-10-14 4920
-
关于CAN2.0协议(AB)与CANBASIC报文的一些疑问2017-03-22 5947
-
CAN FD协议介绍2021-08-20 2466
-
MCU通过SPI串口扩展CAN/CAN FD接口扩展方案2021-11-04 3032
-
CAN支持CAN2.0协议中提到的自动重传功能,为什么找不到?2023-03-23 949
-
CAN_ISO11898与CAN2.02016-07-26 3336
-
工业CAN2.0及CAN-FD隔离器及共模干扰抑制模组2019-01-17 6834
-
CAN-FD协议你了解多少 ?2020-03-08 18324
-
can总线一帧多少字节多少位_MCU扩展CAN/CAN FD接口方案MCP2518FD+ATA65632021-10-29 1816
-
STM32设备上的CAN FD2022-08-28 1187
-
干货分享|基于HPM6750 CAN2.0 及 CAN- FD 操作指南2022-06-16 4951
-
Can2.0协议中文版2023-08-10 1500
-
虹科CiA演讲回顾 | CAN(FD)总线协议转换原理及其在汽车行业的应用2023-09-21 2721
-
什么是CAN2.0协议?2024-03-29 3574
全部0条评论

快来发表一下你的评论吧 !
