

基于LQR设计ACC控制器并实现闭环仿真
控制/MCU
描述
ACC自适应巡航控制是经典巡航控制的扩展,在现代车辆中广泛使用,自适应巡航控制系统期初主要应用于飞机的巡航行驶中,随着汽车工业的发展,现阶段ACC功能被广泛用于商用车和卡车中。
自适应巡航控制(ACC)系统又称主动巡航控制系统,是在传统定速巡航控制基础上结合了车距保持功能,利用车载传感器探测前方行驶环境,通过控制节气门和制动系统自动调整车速,提高驾驶舒适性和安全性。
ACC系统由环境感知、控制决策、底层执行和人机交互四个基础模块组成。感知模块由毫米波雷达、摄像头等传感器组成,通过雷达和摄像头数据融合,感知周边障碍物信息以及可通行区域信息;控制决策根据感知信息,决策所需要的控制指令,向底层执行模块发出指令,控制车辆制动系统来完成自适应跟车和自动紧急刹车。
ACC系统架构
ACC分为巡航和跟车模式,巡航模式的控制目标比较明确且单一,即以达到驾驶人员所设定需要达到的速度,并以预设速度稳定匀速行驶为最终目的;跟车模式的控制趋于多元化、精细化,增加了ACC系统设计的难度,也是众多学者目前研究的重点对象。
ACC系统跟车模式控制形式包括直接式控制和分层控制,直接式控制通过传感器获得的信息由决策算法直接计算出节气门开度或者制动力,从而控制车辆行驶;分层控制包含上层控制和下层控制,即决策层和控制层,决策层根据获得的周围信息和行车状态信息结合间距策略得到期望加速度,并将其作用于控制层,控制层的作用则是通过加速度计算出节气门开度或者制动力来控制车辆按照期望间距行驶。目前多采用分层控制,抗干扰能力强,便于调整参数和系统调试。
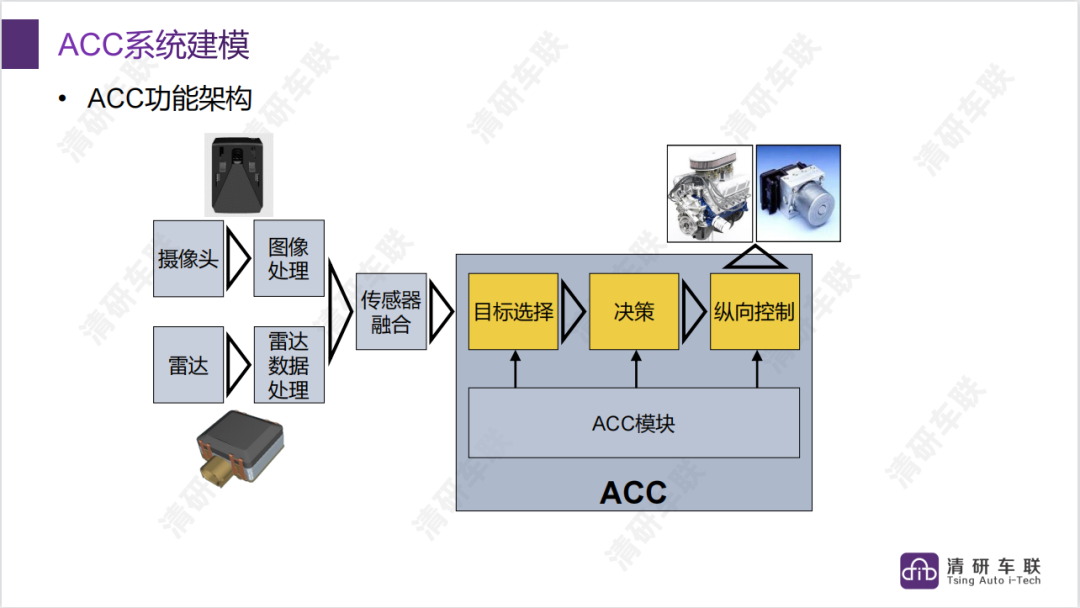
图2
ACC主要功能作用
1.代替驾驶员进行操作,减轻驾驶员的负担和失误操作几率;
2.提高驾驶舒适性,减少驾驶员的疲劳感,从而减少交通事故的发生,提高行车安全性;
3.减少驾驶员因为注意力不集中引起的慌乱加减速;
4.提前设定好行车的安全时距离,提高行车道路的利用率,缓解交通压力。
ACC主要控制算法和系统设计的难点
ACC系统设计的难点
1. 弯道的目标误报和漏报
在弯道处,传感器检测结果误把弯道处其他车道的车辆当成目标,做出减速的操作;或者是在同一车道线内,传感器却未识别到弯道处的车辆,而出现误加速的情况。实际工程情况一般出现在掉头,拐弯的时候,突然加速或是减速。
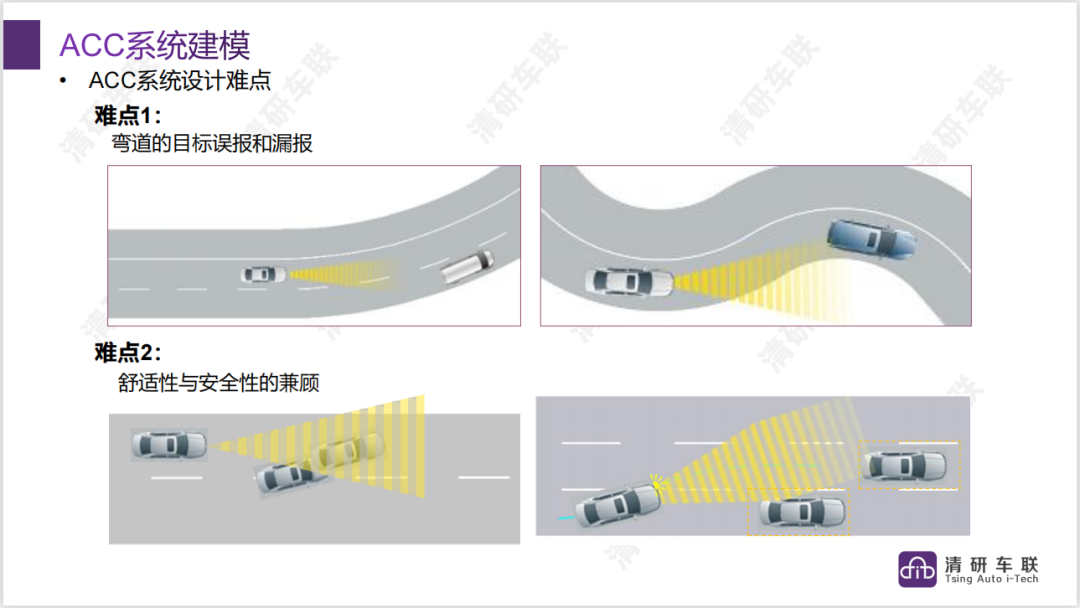
图3
2. 舒适性与安全性的兼顾
车辆在本车道正常行驶时,其他车辆突然变道至本车道前方,出现在ACC目标检测范围内,导致车辆突然减速或刹车;本车辆换道过程中,ACC前方参照目标更改,导致突然加速再减速的情况。这在实际驾驶复杂的加塞交通情况下不停地出现刹车/减速,会极大地影响驾驶的的安全性和舒适性。(参照图3难点2)
在实际设计ACC系统时就需要考虑实际的工况因素,考虑车辆切入与切出的实际交通情况以及车辆运动轨迹的预测和动态速度设置问题,来设计ACC系统,实现自动驾驶自适应巡航的智能辅助功能。
ACC的主要控制算法
ACC系统主要控制算法有PID控制、最优控制、滑膜控制、模糊控制和模型预测控制。
PID控制是经典的控制算法之一。是工程中应用最成熟的,也是使用最广的的控制器,在ACC系统定速巡航模式和跟车模式方面都有研究。
最优控制理论,在满足一定约束条件下寻找最优控制律,使目标函数取极大值或极小值。在ACC的设计中需要综合考虑安全性、跟车性等多个相互矛盾的控制目标所组成的目标函数,以及目标函数在考虑间距、车辆本身条件等约束下求得的最优控制率,是典型的最优控制问题。本次课程设计ACC控制器也是基于最优控制LQR算法来实现的。
滑膜控制,具有灵活、响应快、对参数变化和干扰不灵敏等特点,是一类控制不连续的非线性控制。SMC对于解决ACC系统的干扰、系统时滞等问题有重要意义。
模糊控制,不需要精确的模型,是将多年操作经验或专家经验设计为模糊规则,通过将输入的信号进行模糊处理作为系统的输入,以模糊规则作为参考,利用系统输入完成模糊推理,进行模糊处理作为系统输出。
模型预测控制(MPC)由于其能够采用加权的办法很好解决相互矛盾的控制目标,成为ACC中较为主流的控制算法。本次课程也会补充基于MPC设计ACC学习。
编辑:黄飞
-
基于双闭环模糊PID控制器的开关电源控制的设计2018-10-08 2580
-
如何去设计并实现一种SDRAM控制器?2021-06-07 1844
-
实现电机的速度闭环控制2021-08-04 1815
-
采用了PID控制器的闭环控制策略2021-08-23 1476
-
滑模控制器的设计与仿真实现2021-09-07 2236
-
如何利用simulink对LQR控制器进行仿真呢2021-11-22 3476
-
应用MC68HC05B6微控制器单元实现伺服电机闭环速度控制2009-06-19 657
-
二级倒立摆的半物理仿真模型研究与实现2009-07-31 957
-
使用PLC来实现闭环控制 选择何种控制方式非常重要2019-05-15 9171
-
伺服控制器速度开环和速度闭环区别2021-09-08 3340
-
DCDC传统双闭环控制器2021-09-22 1605
-
如何使用电力电子仿真数字控制器2022-04-25 3341
-
VF控制SIMULINK实现方案及仿真教程2023-03-02 1177
-
LQR控制算法之最优控制2023-05-19 6104
-
PLC如何完成闭环控制及逻辑控制2024-06-27 4050
全部0条评论

快来发表一下你的评论吧 !
