

 分布式模拟输入(AI)类型模块
分布式模拟输入(AI)类型模块
描述
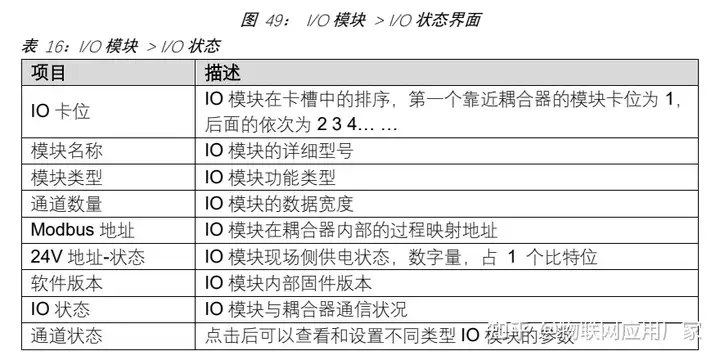
上电后,耦合器自动识别所有与之相连的 I/O 模块,并根据模块的类型、数据宽度和模块在节点中的位置创建内部本地过程映像。
如果添加、更改或移除 I/O 模块,会建立新的过程映像,过程数据地址会改变。在添加 I/O 模块时,则必须考虑所有先前 I/O 模块的过程数据。
控制器最多可连接 32 个 I/O 模块,包括数字输入输出,模拟输入输出和特殊功能模块。

数字输入模块可以提供两种类型的数据,一种是当前输入的状态值,布尔类型;另一种是计数器数值,32 位数值型,支持清除功能。
数字输入模块可以提供两种类型的数据,一种是当前输入的状态值,布尔类型;另一种是计数器数值,32 位数值型,支持清除功能。

模拟输入(AI)类型模块支持通过耦合器 web 页面设置参数,这样模块内部自动实现数据换算,可以直接输出与传感器对应的实际工程数值。

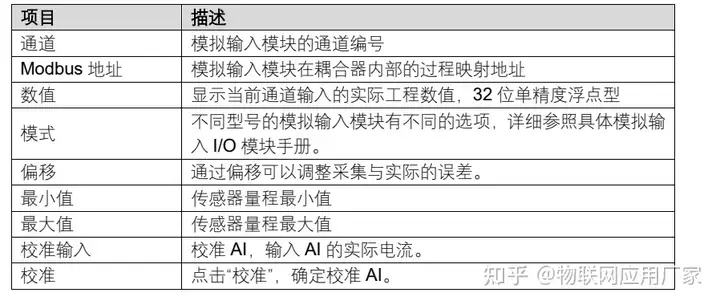
模拟输入模块的电信号数值(一般是传感器)和实际工程数值存在线性关系,它们
的公式如下(以 4-20mA 为例):
实际工程数值 =(电流值 - 4)*((最大值 – 最小值)/(20 - 4))+最小值
以 4-20mA 类型的水位传感器测量水塔深度为例:
已知水位传感器量程是 0-100m,电流数据 5.6mA,计算水塔深度:
代入公式:(5.6 - 4) * ((100 - 0) / (20 - 4)) + 0 = 10
水塔深度是 10m;
可以通过串口模块接入各种支持 Modbus RTU 协议的传感器,终端等设备。串口模
块内置 Modbus RTU (Master)协议,把外部传感器数据通过本地总线和耦合器建立过程
映射关系。

审核编辑 黄昊宇
-
AI Ceph 分布式存储教程资料大模型学习资料20262026-05-01 184
-
分布式软件系统2009-07-22 5451
-
分布式Redis的五种数据类型2019-10-15 1641
-
分布式系统的优势是什么?2020-03-31 3186
-
HarmonyOS应用开发-分布式设计2020-09-22 2629
-
如何高效完成HarmonyOS分布式应用测试?2021-12-13 2399
-
HarmonyOS应用开发-分布式语音摄像头体验2022-08-24 5368
-
基于分布式电源接入对电网运行的影响2017-12-18 1318
-
什么是分布式系统_分布式系统的类型2020-05-25 8913
-
关于分布式系统的几个问题2020-09-23 4147
-
如何使用分布式存储系统促进AI模型训练2023-06-12 1517
-
什么是讯维分布式输入节点和分布式输出节点2023-08-28 5674
-
分布式IO模拟量模块:多领域应用的高效能解决方案2024-10-24 1246
-
分布式云化数据库有哪些类型2025-01-15 1280
-
分布式存储有哪几种类型?2025-02-20 1948
全部0条评论

快来发表一下你的评论吧 !
