

如何使用计算机辅助设计工具设计四足机器人
机器人
描述
大家好!这篇文章是一步步的指南,教导您如何使用计算机辅助设计工具,设计一台四足机器人。

四足机器人的设计灵感来自于波士顿动力公司(Boston Dynamics)的Spot机器人,它看起来有点像只狗。设计这台机器人是为了增材制造,且易于使用任何商业FDM/FFF 3D打印机打印。虽然,我计划亲自制作机器人,但这篇教学文将只涵盖设计时间,而我将很快于另一篇文章中,发布制造四足机器人的一步步过程。
透过这篇文章,我将向您介绍这台机器人的通用设计过程,所以您不必复制我正在建构的内容。藉由运用这篇教学文,您可随心所欲发挥创意,以创造任何多足机器人。
盼望您享受阅读这篇文章,并且于留言发布您的设计。
软件和设备:
1.SolidWorks(设计)
2.Visualize(渲染)
3.桌面计算机/笔记本电脑
4.计算机鼠标(非必要,但建议具备,将使这项项目更容易完成。)
步骤一:素描概念
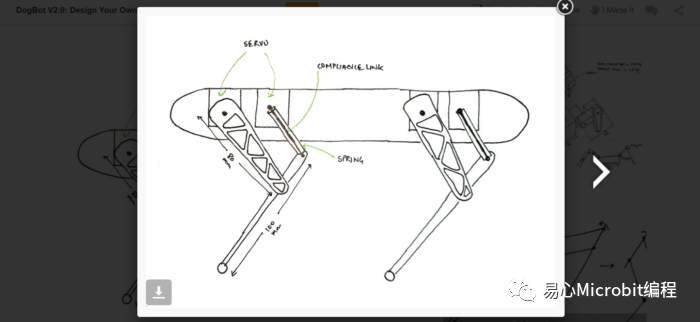
图一
设计流程的第一步,就是拿出您的素描簿,开始描绘机器人的不同概念。素描本身不必完美,只需要拥有大致形状,并且形成具备粗略估计尺寸的组件。如同上方的图一所示,我从非常初级的2D素描概念展开,描绘机器人的基本轮廓,以及肢体尺寸。有了初步构想后,我最终完成了这个灵感源自于狗的机器人的设计,并于小腿具备一个平行驱动机构。之后,我开始描绘更多细节,例如电子设备的放置,腿步的运动学,以及腿部驱动机构等等。我还展示了一些用来详细构思组件的草图。
关于细节的描绘,我建议将草图绘制成3D,以使设计的可视化效果更好。以下是一些针对产品设计素描的资源:
TheSketchMonkey’s “3 Important SketchingExercises for Any Designer (Beginner) – YouTube“
https://www.youtube.com/watch?v=IM_zvACz2og&t=12s
Sketch a Day’s “Sketch-A-Day – How tosketch complex organic shapes – YouTube“
https://www.youtube.com/watch?v=_JK73WLM3xQ
Reid Schlegel’s “Sketching Basics 2:Perspective is King – YouTube“
https://www.youtube.com/watch?v=JK0qlnnG1WA
除了详细的3D草图,我也鼓励您绘制组件的粗略草图,以便有更好的构思。
第二步:汇入/下载电子组件
设计机器人时考虑电子组件,是任何机器人设计过程的重要部分,但如果每一项电子组件皆一一设计,那过程将很乏味。所以,我从GrabCAD获取大部分的电子组件。Solidworks允许用户以.STEP、.SLDPRT、.STL等文件类型,直接汇入预先设计好的电子组件,例如伺服马达、电池、控制器等进行组装;而未支持的文件类型,可使用任何免费的在线转档器,将档案转换成.STEP或.SLDPRT。
https://grabcad.com/library
以下是我从GrabCAD汇入的电子组件列表:
伺服马达:Lewansoul LX-16A bus servo | 3D CAD Model Library | GrabCAD
https://grabcad.com/library/lewansoul-lx-16a-bus-servo-1
DC-DC 降压转换器:DROK AdjustableDC Buck Converter Model 180078/180080 with built in mount | 3D CAD ModelLibrary | GrabCAD
https://grabcad.com/library/drok-adjustable-dc-buck-converter-model-180078-180080-with-built-in-mount-1
伺服总线连接器:LewanSoul LX-16A Servo Bus Linker | 3D CAD Model Library | GrabCAD
https://grabcad.com/library/lewansoul-lx-16a-servo-bus-linker-1
电池:TalentCell Rechargeable 12V 3000mAh Lithium Ion Battery Pack | 3DCAD Model Library | GrabCAD
https://grabcad.com/library/talentcell-rechargeable-12v-3000mah-lithium-ion-battery-pack-1
我无法在网络上找到Libre computer (Le Potato)的CAD,所以我自己设计了一个:AML-S905X-CC(Le Potato) | 3D CAD Model Library | GrabCAD
https://grabcad.com/library/aml-s905x-cc-le-potato-1
第三步:设计大腿
既然设计素材都预备好了,就让我们开始设计四足机器人。
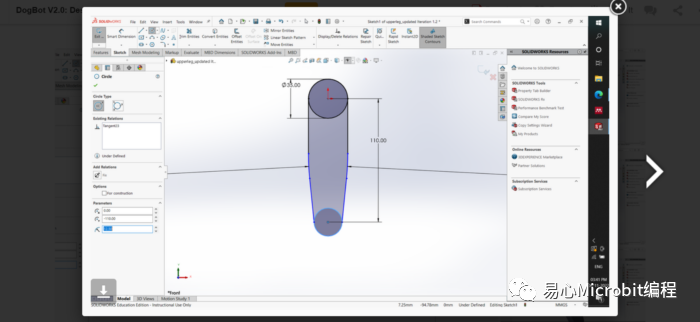
图二
如图二所示,为设计大腿,我由基本素描展开。草图被拉伸成30毫米的厚度。之后,拉伸主马达轴的界面,并且创造出8个M2机器螺丝的螺丝孔,以安装马达连接器,该马达连接器是在马达轴和大腿间的连接接口。大腿的基本形状完成后,针对辅助马达,我切割出45 x 18毫米插槽;而为了安装小腿,我切割出50 x 18毫米的插槽。接着,其余更精细的细节被添加至我们的CAD模型,例如,针对线路管理而设计的槽,辅助马达支架,以及相关收尾工作。
第四步:设计小腿
为设计小腿,我遵循了类似的流程。首先,我创造出一张基本草图,其灵感源自于第一步所提到的粗略概念图。之后,我拉伸草图,并添加一些更为细致的细节,例如用于平行联动机构的槽,以及模块化的脚趾切出。
第五步:组装腿部
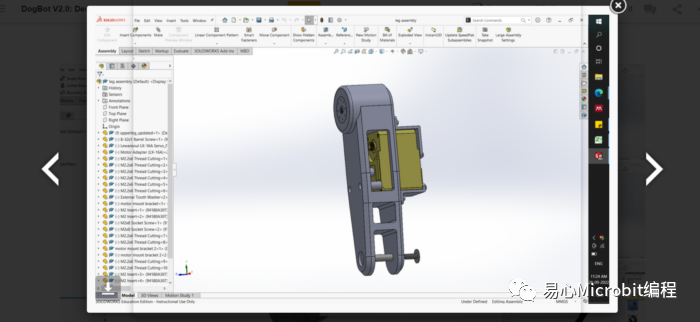
图三
于此步骤中,我们将组装刚设计好的大腿与小腿,而2号马达将被固定于大腿上(图三)。针对这项目标,我们需要在工作区内开启这三个组件,并依据设计将它们配合起来。一旦组装好大腿、小腿及马达,合规连杆和Servo horn将被建模并添加至组件中。至此,腿部的设计已完成!让我们进行底座的设计。
第六步:组装底座
在这个步骤中,我们将把机器人底座的所有组件组装起来,包括电子组件及电源。
第七步:组装腿部、底座、外壳,完成四足机器人的设计。
一旦所有组件就定位,我们便将它们组装起来,四足机器人的设计便大功告成!而我使用Visualize这套软件,产生高质量的渲染,并且完成这台四足机器人。
编辑:黄飞
- 相关推荐
- 热点推荐
- 机器人
-
电路系统计算机辅助设计课件及习题下载2009-10-13 4239
-
高压大功率开关电源的Pspice计算机辅助设计2010-12-22 3405
-
《计算机辅助设计与Protel ***》教学教案PDF文件,适合新手...2013-07-20 3130
-
开关稳压器计算机辅助设计与仿真软件的应用2016-06-11 3540
-
一种利用计算机控制的快递分拣机器人2021-09-02 1751
-
MATLAB控制系统计算机辅助设计2021-09-07 1436
-
计算机辅助设计2021-09-08 1349
-
电器计算机辅助设计2008-11-15 709
-
空冷器计算机辅助设计的方法2009-06-08 682
-
浅谈客车空调系统的计算机辅助设计2009-07-25 613
-
NPU超大规模集成电路计算机辅助设计系统2010-04-28 675
-
基于计算机辅助设计技术(TCAD)的工艺开发2010-11-10 1478
-
集成电路计算机辅助设计2018-04-17 1220
-
计算机辅助设计软件CAD的学习教程免费下载2020-05-15 1225
-
高压大功率开关电源的PSPICE计算机辅助设计2021-09-18 932
全部0条评论

快来发表一下你的评论吧 !
