

机器视觉加速从2D走向3D
描述
机器视觉是指利用相机、摄像机等传感器,配合机器视觉算法赋予智能设备人眼的功能,从而进行物体的识别、检测、测量等功能。机器视觉是在上世纪 50 年代从统计模式识别开始的,当时的工作主要集中在二维图像分析和识别。随着 5G、AI 等技术的不断发展,行业应用需求的不断提升,机器视觉从二维向三维过渡不但成为可能,更是必须的方向。
机器视觉从2D进化到3D立体“视界”,常见常用的刷脸支付、Face ID、VR、无人便利店、智能机器人等产品技术,背后关键的科技便是3D视觉技术。
在过去几年里,3D视觉概念迭出,大量资本涌入这个赛道,新进企业众多。业内人士普遍认为,3D视觉在工业领域的产值和产出,可能要远远大于消费领域,但因为渗透率很低,推进速度不够快,当前3D工业相机的规模在几亿美金区间,设备和软件在20亿美金水平,但行业市场有50倍以上的渗透率增长空间。
从2D到3D的赛道变化2D技术起步较早,技术也相对成熟,在过去的30年中已被证明在广泛的自动化和产品质量控制过程中非常有效。
2D技术根据灰度或彩色图像中对比度的特征提供结果。2D适用于缺失/存在检测、离散对象分析、图案对齐、条形码和光学字符识别(OCR)以及基于边缘检测的各种二维几何分析,用于拟合线条、弧线、圆形及其关系(距离,角度,交叉点等)。
3D视觉利用近红外线光来扫描周围环境,再由CMOS图像传感器接收并转换为数字信号,最后通过芯片计算出物体在三维空间中的远近与相对位置,因此能了解物体的动作、与环境的互动,由此即能发展出由动作控制计算机的体感操控,检测出前方的物体等。
由于2D视觉逐渐无法满足对复杂对象识别和尺寸测量精度日益增加的要求,因此也催生了3D视觉的增长。从2D转向3D,需要所获取信息质量和数量的飞跃。相对来说,2D视觉市场积淀深,3D视觉方案只有达到一定的成熟度,才可以全面实现2D向3D的转变。
过去工业生产采用的机械臂都是盲取,闭着眼睛照着设定好的路径加工,没有更高阶的智慧判断。如果采用3D视觉后,就可以在更复杂的环境里更精准的夹取物件。业界认为,从2D到3D的过渡将成为继黑白到彩色,低分辨率到高分辨率以及静态图像到电影之后的第四次革命。
但是3D机器视觉技术门槛高,涉及到光学、结构、散热等跨学科设计问题,再加上芯片、算法构成的复杂系统设计,需要一定的技术实力,投入足够的时间和人才,才可以研发相关方案。技术门槛高、投入大、研发企业少都是3D视觉发展路上的拦路虎。
在3D视觉兴起之后,选择2D视觉还是3D视觉,成为一个有争议的问题。有业内人士表示,3D视觉将全面替代2D视觉;但也有观点认为,3D视觉价格高,在可以应用2D视觉的场合,没有必要用3D视觉;当然还有第三方观点认为,2D视觉和3D视觉可以融合应用。
就具体技术角度而言,2D颜色和3D几何数据的采集是从两个不同的物理通道进行的。
从落地来看,目前3D主要应用于大型工业制造业企业、物流、智慧城市监控,以及少部分消费应用场景等,从探索到突破,在落地的路上逐显繁荣。
3D视觉的不同技术形态目前市场上主流的有四种3D视觉技术,双目视觉、TOF、结构光3D成像和激光三角测量。
1.双目视觉双目技术是目前较为广泛的3D视觉系统,它的原理就像我们人的两只眼睛,用两个视点观察同一景物以获取在不同视角下的感知图像,然后通过三角测量原理计算图像的视差,来获取景物的三维信息 。
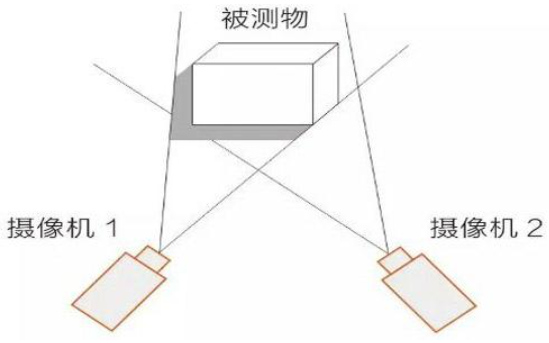
由于双目技术原理简单,不需要使用特殊的发射器和接收器,只需要在自然光照下就能获得三维信息,所以双目技术具有系统结构简单、实现灵活和成本低的优点。适合于制造现场的在线、产品检测和质量控制,不过双目技术的劣势是算法复杂,计算量大,而且光照较暗或者过度曝光的情况下效果差。
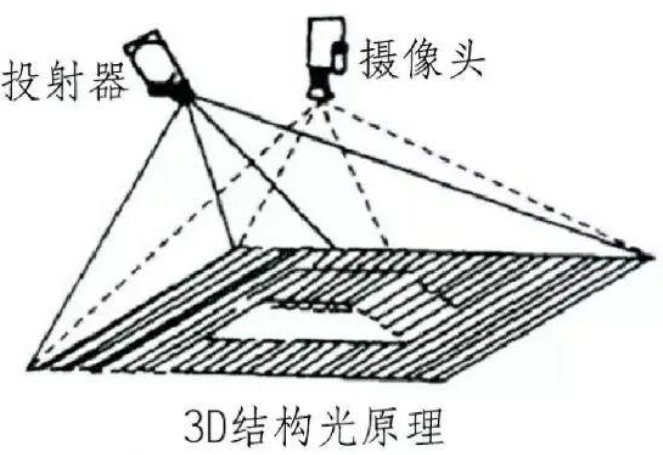
2.3D结构光技术
它通过一个光源投射出一束结构光,这结构光可不是普通的光,而是具备一定结构(比如黑白相间)的光线打到想要测量的物体上表面,因为物体有不同的形状,会对这样的一些条纹或斑点发生不同的变形,有这样的变形之后,通过算法可以计算出距离、形状、尺寸等信息从而获得物体的三维图像。
3. 激光三角测量法它基于光学三角原理,根据光源、物体和检测器三者之间的几何成像关系,来确定空间物体各点的三维坐标 。
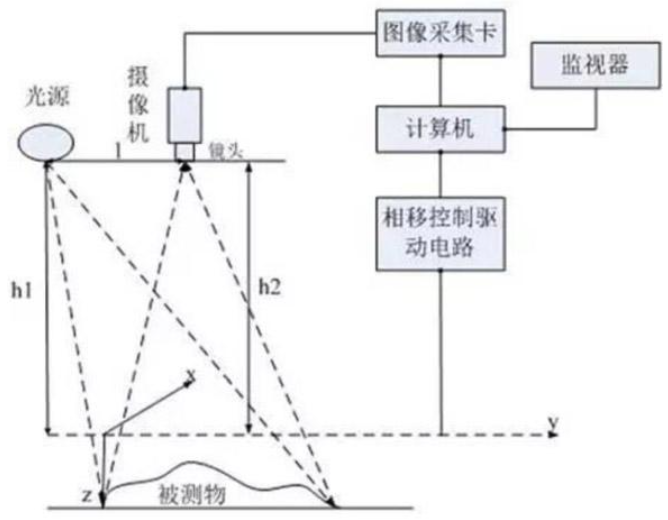
通常用激光作为光源,用CCD相机作为检测器,具有结构光3D视觉的优点,精准、快速、成本低。
4. TOF飞行时间法成像技术
TOF是Time Of Flight的简写。它的原理通过给目标物连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行时间来得到目标物距离。
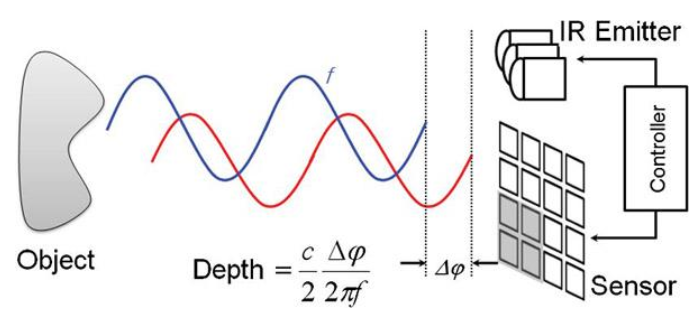
TOF的核心部件是光源和感光接收模块,由于TOF是根据公式直接输出深度信息,不需要用类似双目视觉的算法来计算,所以具有响应快、软件简单、识别距离远的特点,而且由于不需要进行灰度图像的获取与分析,因此不受外界光源物体表面性质影响。典型的TOF 3D扫描系统每秒可测量物体上10,000至100,000个点的距离。不过TOF技术的缺点是:分辨率低、不能精密成像、而且成本高。
总的来说,无论是立体视觉、结构光、激光三角测量还是TOF,没有哪种技术是更好的,只有哪种技术是更适合的。
3D或将成为主流
机器人、自动驾驶、金融支付已经体现出对3D视觉的强需求,当然,还有虚实相融的元宇宙,AR、VR等XR设备和3D交互需求已经率先凸显。这些需求带来了庞大的市场,但这也是极度碎片化的市场。
GGII数据显示,预计到2023年我国机器视觉市场规模将达到208.6亿元,其中3D视觉市场规模将达到34.28亿元,预计到2025年我国3D视觉市场规模将超过100亿元。在这个未来的百亿级市场中,3D视觉将趋于智能化、集成化、实时性、高性能、多场景应用等方向。
2D视觉虽为当前主流,但随着测量精度要求越来越高,被测物体条件越来越复杂,2D系统的缺陷也愈发突出,而3D视觉技术不断获得突破,在精度、灵活性和速度方面都是2D无可比拟的,所以3D机器视觉检测有取代2D系统的趋势,相信3D视觉未来将成为主流视觉系统。
应用背景
OCR字符识别,是指对部件或产品上刻印的字符进行确认、辨别、判定的检测识别。此项技术目前已广泛应用于工业自动化生产的产品质量管理环节当中,企业通过为机器视觉检测设备安装OCR系统,快速完成对产品生产日期、保质期、生产批号、条码等字符信息的检测,从而更好地进行产品管理和追溯。
应用现状
作为机器视觉的典型应用方向,OCR的工作原理即为:通过工业相机、工业镜头拍摄字符图像,运用机器视觉软件进行相应处理分析,判定被检产品是否合格,并输出检测结果和相应信号。
这其中,软件处理环节才是OCR技术真正的“用武之地”。常规的技术处理流程为:背景图像处理——字符切割——字符注册——字符识别与判断——结果输出。
实际的工业应用中,软件的处理过程
审核编辑:郭婷
-
如何促使2D和3D视觉检测的性能成倍提升?2021-02-22 4265
-
3D技术的应用探索3D机器视觉库2016-03-22 1160
-
3D机器视觉技术助力机器人产业快速发展2018-11-17 4752
-
3D 机器视觉为什么将逐步取代 2D 识别技术?2020-08-21 6041
-
3D机器视觉技术价值将成为推动市场持续增长的重要因素2020-08-28 1239
-
2D相机与3D相机的机器视觉2020-11-27 9718
-
阿里研发全新3D AI算法,2D图片搜出3D模型2020-12-04 4797
-
一文带你看懂3D视觉2021-09-01 7843
-
3d人脸识别和2d人脸识别的区别2022-02-05 54434
-
抓取作业机器人3D视觉系统的设计方案2023-05-15 1625
-
机器视觉加速从2D走向3D2023-06-04 2871
-
2D与3D视觉技术的比较2023-12-21 3304
-
一文了解3D视觉和2D视觉的区别2023-12-25 5701
-
2025 3D机器视觉的发展趋势2025-12-10 1530
-
英伦科技:2D/3D可切换显示技术未来应用场景有哪些?2026-05-08 290
全部0条评论

快来发表一下你的评论吧 !
