

 ROBOTOUS-RFT系列六维力传感器
ROBOTOUS-RFT系列六维力传感器
今日头条
描述
力扭矩传感器的测重方式
力扭矩传感器的工作方式多种多样。操作的基本原理是将机械应力(力、扭矩等)转化为电信号。当力作用于可变形的弹性轴(通常以应变计的形式)时; 机械变形量被转换成电信号,电信号被转换成数字来指示可量化的测量值。测得的力和扭矩通常分别用牛顿(N)和牛顿米(Nm)表示。这些测量然后被分割成6个轴 Fx, Fy, Fz, Tx, Ty, Tz,其中F表示线性力,T表示旋转扭矩。
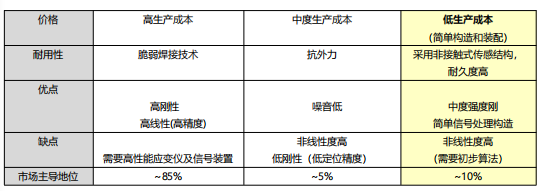
我司(Robotous)最畅销 6 轴力扭矩传感器(RFT 系列)提供最准确和最精确的力和扭矩测量。由于我们的电容式传感器的性质,RFT系列最耐用且最具成本效益,同时保证了最佳的数据读取。与其他类型的力扭矩传感器(电阻、光学等)相比,非接触式传感结构具有难以置信的耐磨性。与其他传感器类型不同,您不需要任何笨重的外部信号放大设备。通过嵌入互补的信号微设备,我们的一体化 6 轴力扭矩传感器是您所需的一切,使您的制造过程与以往不同。
应用领域
协作机器人(简称cobot)是RFT传感器最适用的工作领域。传感器可以与末端执行器、机械手或夹具协作,并通过允许使用更高级别的命令来提高性能。在附加力扭矩传感器之前,协作机器人仅限于简单的任务,例如拾取和放置操作等。但是,与力扭矩传感器合作,协作机器人现在能够测量其施加的力的大小,然后调整其施加力或协调以更好地执行任务或完成更精细的任务,例如去毛刺、精密装配、手动引导等。此外,它们可以借助力扭矩测量进行质量检测和过程监控。
RFT传感器的使用不限于上述用途。还可以应用于太空机器人,手术用机器人,生物医学工程,甚至也可以使用到仿人机器人等多种领域。在某种情况下,半自主机器人由操作员在线或系留连接的下来远程控制,以保护操作员免受(潜在)危险环境或材料的影响。远程机械手机器人在军队中非常有用,尤其是在侦察行动中。此外,它们可以在对工人造成危险的环境中表现出卓越的性能,如核泄漏、高压、生物危害、高层建筑等。力扭矩传感器用于类人机器人和遥控机器人,以最大限度地提高机器人任务的安全性质量通过力/扭矩监测和控制。
总而言之,力扭矩传感器在机器人行业的需求和重要性都在迅速增长。 预计在未来5年内协作机器人、工业机器人、医疗设备和康复机器人、无人机等相关市场将会成爆发式增长,力扭矩传感器市场也将持续加速发展。
审核编辑 黄昊宇
-
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?2026-04-29 276
-
ROBOTOUS的RFT系列六维力传感器产品手册2022-11-25 8935
-
目前国内对于六维力传感器的认知与局限在哪里2022-12-15 7892
-
ROBOTOUS电容式六维力传感器2023-04-13 1229
-
大量程六维力传感器设计与标定研究_韩康2017-03-19 813
-
韩国ROBOTOUS六维力传感器2022-11-24 2458
-
RFT系列六维力/六轴力传感器的测定原理和方式2022-12-21 2358
-
六维力传感器有什么作用?可以数据采集并进行监控吗?2023-06-29 2440
-
六轴力/六维力传感器在工业、科研、医疗等领域的广泛应用2023-07-31 2458
-
基于六维力传感器的机械臂自动装配应用2024-06-06 2371
-
人形机器人核心配件之六维力传感器2025-04-15 2220
-
深度整理:六维力传感器调研纪要2025-02-27 1171
-
六维力传感器的技术、应用与核心指标2025-04-20 2760
-
海伯森HPS-FT系列数字式六维力传感器介绍2025-08-11 1848
-
六维力传感器是维度最高的力觉传感器2026-04-30 2879
全部0条评论

快来发表一下你的评论吧 !
