

 STM32CUBEIDE(9)----双ADC轮询模式扫描多个通道
STM32CUBEIDE(9)----双ADC轮询模式扫描多个通道
描述
概述
本章STM32CUBEMX配置STM32F103双ADC轮询模式扫描多个通道,通过串口进行打印。
生成例程
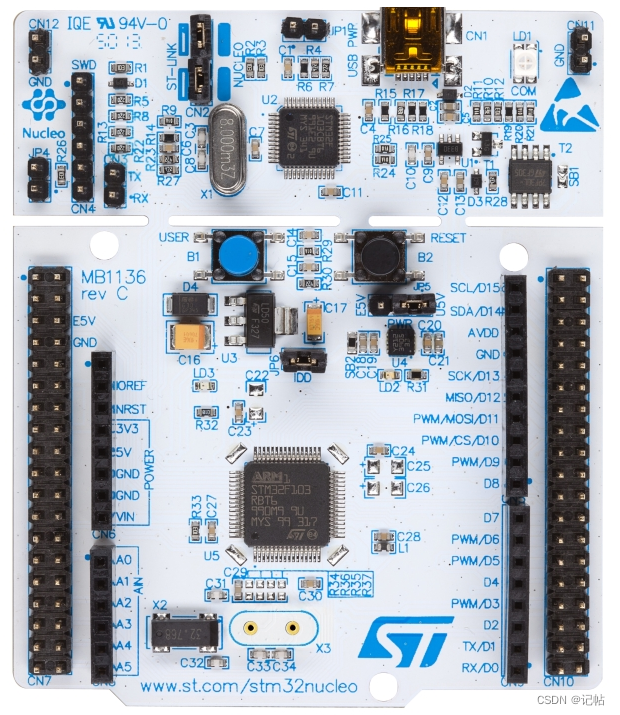
使用STM32CUBEMX生成例程,这里使用NUCLEO-F103RB开发板
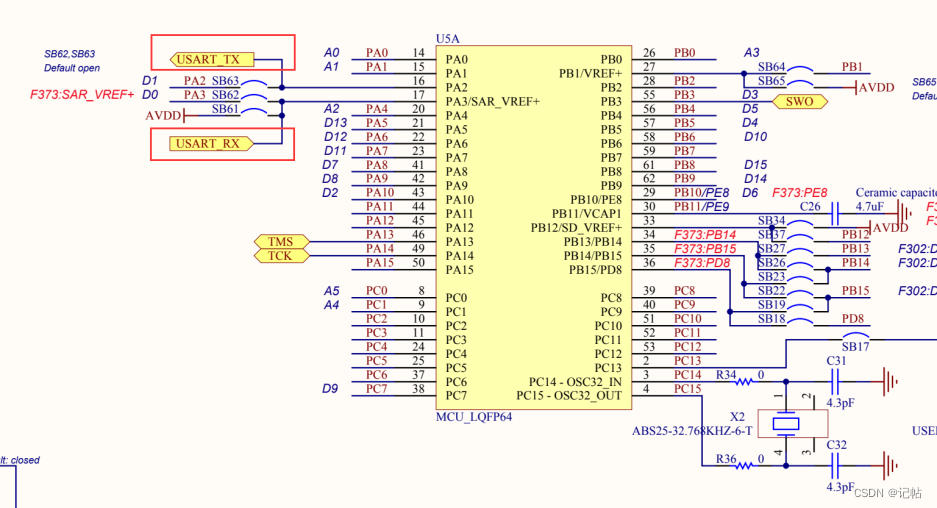
查看原理图,PA2和PA3设置为开发板的串口。
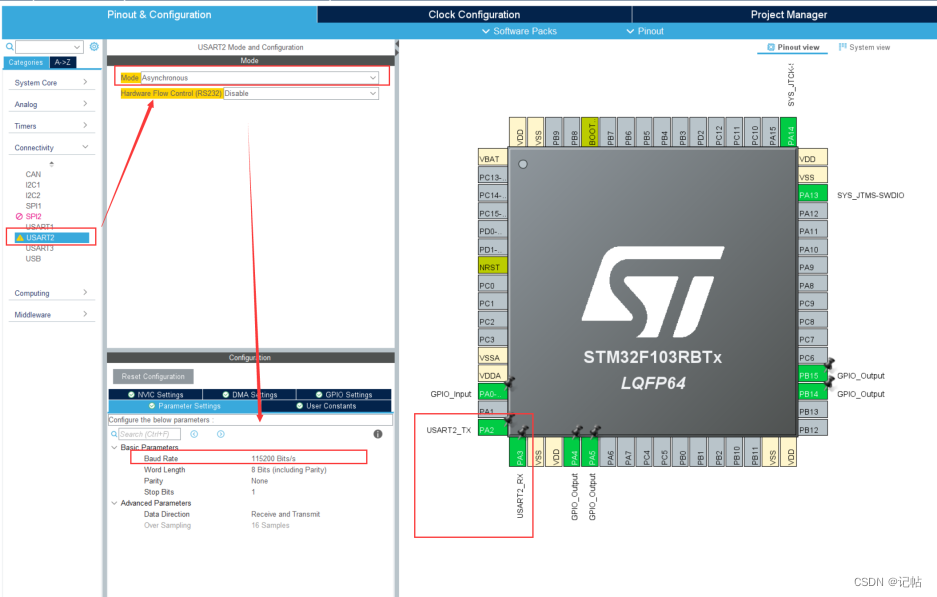
配置串口。
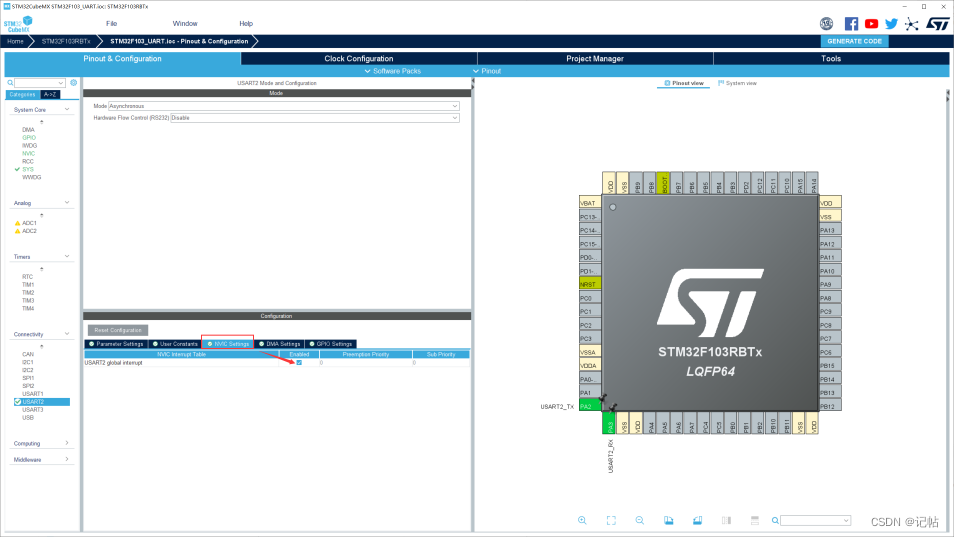
开启中断。
查看原理图,Arduino的接口A0-A5都是AD口。
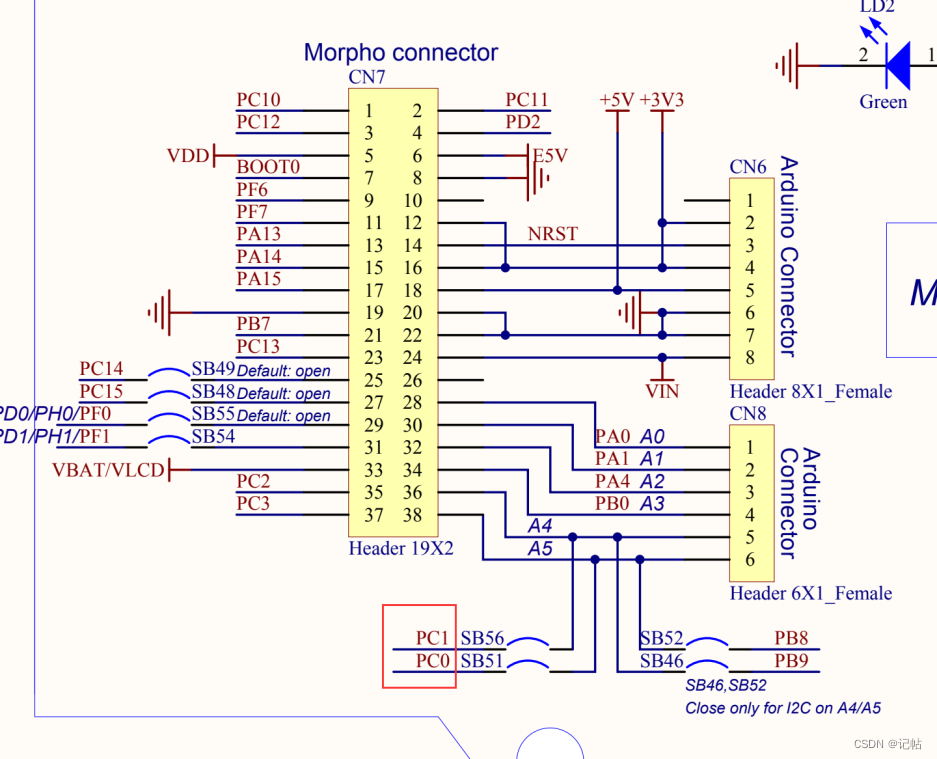
ADC通道配置
| ADC1 | IN0(PA0) | IN1(PA1) | IN4(PA4) |
|---|---|---|---|
| ADC2 | IN8(PB0) | IN10(PC0) | IN11(PC1) |
ADC1配置。

- ADCs_Common_Settings:
- Mode:Independent mod 独立 ADC 模式,当使用一个 ADC 时是独立模式,使用两个 ADC 时是双模式,在双模式下还有很多细分模式可选,具体配置 ADC_CR1:DUALMOD 位。
- ADC_Settings:
- Data Alignment:
- Right alignment 转换结果数据右对齐,一般我们选择右对齐模式。
- Left alignment 转换结果数据左对齐。
- Scan Conversion Mode:
- Disabled 禁止扫描模式。如果是单通道 AD 转换使用 DISABLE。
- Enabled 开启扫描模式。如果是多通道 AD 转换使用 ENABLE。
- Continuous Conversion Mode:
- Disabled 单次转换。转换一次后停止需要手动控制才重新启动转换。
- Enabled 自动连续转换。
- DiscontinuousConvMode:
- Disabled 禁止间断模式。这个在需要考虑功耗问题的产品中很有必要,也就是在某个事件触发下,开启转换。
- Enabled 开启间断模式。
- Data Alignment:
- ADC_Regular_ConversionMode:
- Enable Regular Conversions 是否使能规则转换。
- Number Of Conversion ADC转换通道数目,有几个写几个就行。
- External Trigger Conversion Source 外部触发选择。这个有多个选择,一般采用软件触发方式。
- Rank:
- Channel ADC转换通道
- Sampling Time 采样周期选择,采样周期越短,ADC 转换数据输出周期就越短但数据精度也越低,采样周期越长,ADC 转换数据输出周期就越长同时数据精度越高。
- ADC_Injected_ConversionMode:
- Enable Injected Conversions 是否使能注入转换。注入通道只有在规则通道存在时才会出现。
- WatchDog:
- Enable Analog WatchDog Mode 是否使能模拟看门狗中断。当被 ADC 转换的模拟电压低于低阈值或者高于高阈值时,就会产生中断。
ADC2配置。

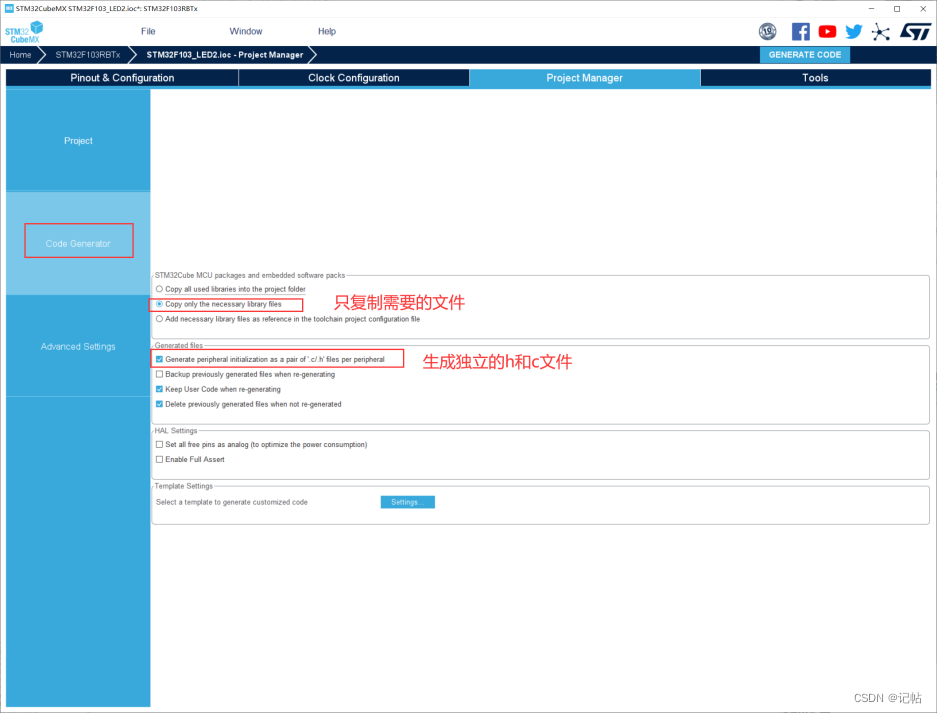
生成独立的文件。
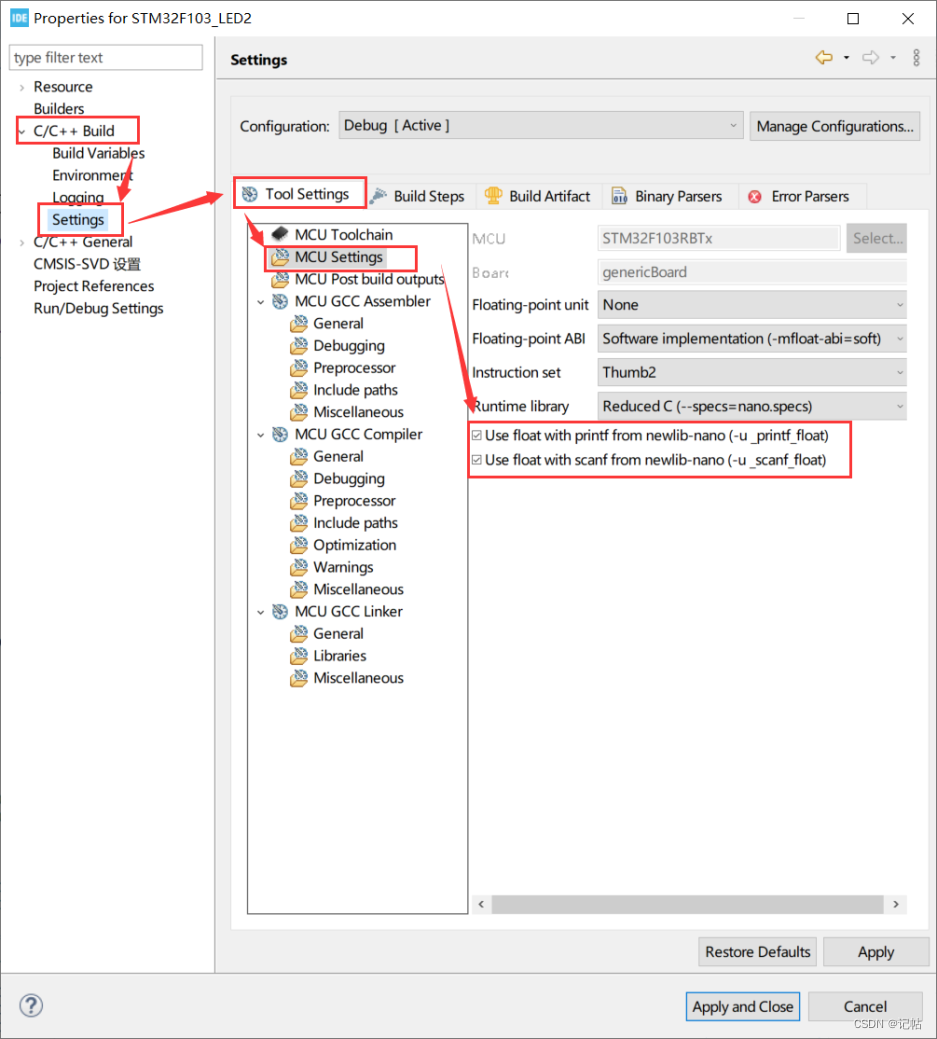
STM32CUBEIDE配置
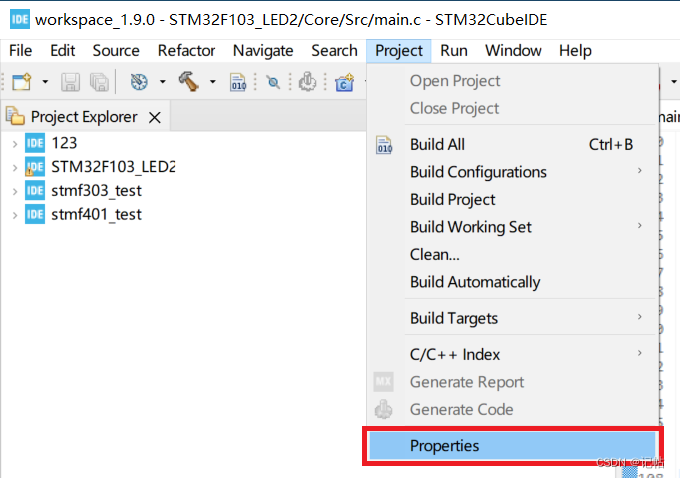
若需要打印浮点型,需要勾选下面的选项。
串口重定向
在main.c中,添加头文件,若不添加会出现 identifier "FILE" is undefined报错。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
函数声明和串口重定向:
/* USER CODE BEGIN PFP */
#ifdef __GNUC__ //串口重定向
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart2 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END PFP */
代码
定义变量,存放采集到的数据。
/* USER CODE BEGIN 0 */
uint8_t i;
uint16_t adc1Buf[3];//ADC1数组
uint16_t adc2Buf[3];//ADC2数组
/* USER CODE END 0 */
ADC校准。
/* USER CODE BEGIN 2 */
HAL_ADCEx_Calibration_Start(&hadc1); //ADC校准
HAL_ADCEx_Calibration_Start(&hadc2); //ADC校准
printf("ADC Demo!\\r\\n");
/* USER CODE END 2 */
采集数据。
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
i=0;
while(i<3)
{
HAL_ADC_Start(&hadc1);//启动ADC
HAL_ADC_PollForConversion(&hadc1,0xffff);//表示等待转换完成,第二个参数表示超时时间,单位ms.
//HAL_ADC_GetState(&hadc1)为换取ADC状态,HAL_ADC_STATE_REG_EOC表示转换完成标志位,转换数据可用。
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1),HAL_ADC_STATE_REG_EOC))//就是判断转换完成标志位是否设置,HAL_ADC_STATE_REG_EOC表示转换完成标志位,转换数据可用
{
//读取ADC转换数据,数据为12位。查看数据手册可知,寄存器为16位存储转换数据,数据右对齐,则转换的数据范围为0~2^12-1,即0~4095.
adc1Buf[i]=HAL_ADC_GetValue(&hadc1);
i++;
}
}
printf("\\nadc1_IN0(PA0)=%4.0d,voltage=%1.4f",adc1Buf[0],adc1Buf[0]*3.3f/4095);
printf("\\nadc1_IN1(PA1)=%4.0d,voltage=%1.4f",adc1Buf[1],adc1Buf[1]*3.3f/4095);
printf("\\nadc1_IN4(PA4)=%4.0d,voltage=%1.4f",adc1Buf[2],adc1Buf[2]*3.3f/4095);
HAL_ADC_Stop(&hadc1);
HAL_Delay(500);
i=0;
while(i<3)
{
HAL_ADC_Start(&hadc2);//启动ADC
HAL_ADC_PollForConversion(&hadc2,0xffff);//表示等待转换完成,第二个参数表示超时时间,单位ms.
//HAL_ADC_GetState(&hadc1)为换取ADC状态,HAL_ADC_STATE_REG_EOC表示转换完成标志位,转换数据可用。
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc2),HAL_ADC_STATE_REG_EOC))//就是判断转换完成标志位是否设置,HAL_ADC_STATE_REG_EOC表示转换完成标志位,转换数据可用
{
//读取ADC转换数据,数据为12位。查看数据手册可知,寄存器为16位存储转换数据,数据右对齐,则转换的数据范围为0~2^12-1,即0~4095.
adc2Buf[i]=HAL_ADC_GetValue(&hadc2);
i++;
}
}
printf("\\nadc2_IN8(PB0)=%4.0d,voltage=%1.4f",adc2Buf[0],adc2Buf[0]*3.3f/4095);
printf("\\nadc2_IN10(PC0)=%4.0d,voltage=%1.4f",adc2Buf[1],adc2Buf[1]*3.3f/4095);
printf("\\nadc2_IN11(PC1)=%4.0d,voltage=%1.4f",adc2Buf[2],adc2Buf[2]*3.3f/4095);
HAL_ADC_Stop(&hadc2);
HAL_Delay(500);
}
/* USER CODE END 3 */
测试结果
输入固定电压进行测试。
| ADC1 | IN0(PA0) | IN1(PA1) | IN4(PA4) |
|---|---|---|---|
| 输入电压 | VCC | 2.0V | GND |
| ADC2 | IN8(PB0) | IN10(PC0) | IN11(PC1) |
| 输入电压 | VCC | GND | 2.0V |
测试结果如下。

审核编辑 黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
评论(0)
发评论
-
 记帖MCU
2022-11-30
0 回复 举报交流ⓆU_N:6_15061293 收起回复
记帖MCU
2022-11-30
0 回复 举报交流ⓆU_N:6_15061293 收起回复
-
巧用 STM32CubeIDE 之编译警告2023-10-25 2173
-
STM32CubeIDE快速入门指南2023-09-19 1900
-
STM32CubeIDE安装指南2023-08-01 1628
-
GD32F303固件库开发(10)----双ADC轮询模式扫描多个通道2022-11-30 3557
-
STM32CUBEMX开发GD32F303(10)----双ADC轮询模式扫描多个通道2022-11-29 4040
-
AN5361_开始使用基于STM32CubeIDE双核STM32H7微控制器的项目2022-11-21 865
-
用STM32CubeIDE软件实现STM32外部中断实例2022-08-24 5946
-
第一个STM32CubeIDE项目2021-12-29 2072
-
STM32CubeIDE的MCU开发2021-12-05 1903
-
STM32CubeIDE安装-NSIS Error问题2021-12-03 1860
-
STM32CubeIDE使用2021-12-02 1336
-
Ubuntu 18.04 安装 STM32CubeIDE 小记2021-11-18 1213
-
STM32CubeIDE SWV功能介绍2021-10-13 6748
全部0条评论

快来发表一下你的评论吧 !
