

YOLOv5全面解析教程:train.py逐代码解析
电子说
描述
前言
代码仓库地址:https://github.com/Oneflow-Inc/one-yolov5欢迎star one-yolov5项目 获取最新的动态。如果您有问题,欢迎在仓库给我们提出宝贵的意见。如果对您有帮助,欢迎来给我Star呀~
源码解读: train.py 本文涉及到了大量的超链接,但是在微信文章里面外链接会被吃掉 ,所以欢迎大家到这里查看本篇文章的完整版本。
这个文件是yolov5的训练脚本。总体代码流程:
准备工作: 数据 + 模型 + 学习率 + 优化器
训练过程:
一个训练过程(不包括数据准备),会轮询多次训练集,每次称为一个epoch,每个epoch又分为多个batch来训练。流程先后拆解成:
开始训练
训练一个epoch前
训练一个batch前
训练一个batch后
训练一个epoch后。
评估验证集
结束训练
1. 导入需要的包和基本配置
import argparse # 解析命令行参数模块
import math # 数学公式模块
import os # 与操作系统进行交互的模块 包含文件路径操作和解析
import random # 生成随机数的模块
import sys # sys系统模块 包含了与Python解释器和它的环境有关的函数
import time # 时间模块 更底层
from copy import deepcopy # 深拷贝模块
from datetime import datetime # 基本日期和时间类型模块
from pathlib import Path # Path模块将str转换为Path对象 使字符串路径易于操作
import numpy as np # numpy数组操作模块
import oneflow as flow # OneFlow深度学习框架
import oneflow.distributed as dist # 分布式训练模块
import oneflow.nn as nn # 对oneflow.nn.functional的类的封装 有很多和oneflow.nn.functional相同的函数
import yaml # 操作yaml文件模块
from oneflow.optim import lr_scheduler # 学习率模块
from tqdm import tqdm # 进度条模块
import val # 导入val.py, for end-of-epoch mAP
from models.experimental import attempt_load # 导入在线下载模块
from models.yolo import Model # 导入YOLOv5的模型定义
from utils.autoanchor import check_anchors # 导入检查anchors合法性的函数
# Callbacks https://start.oneflow.org/oneflow-yolo-doc/source_code_interpretation/callbacks_py.html
from utils.callbacks import Callbacks # 和日志相关的回调函数
# dataloaders https://github.com/Oneflow-Inc/oneflow-yolo-doc/blob/master/docs/source_code_interpretation/utils/dataladers_py.md
from utils.dataloaders import create_dataloader # 加载数据集的函数
# downloads https://github.com/Oneflow-Inc/oneflow-yolo-doc/blob/master/docs/source_code_interpretation/utils/downloads_py.md
from utils.downloads import is_url # 判断当前字符串是否是链接
# general https://github.com/Oneflow-Inc/oneflow-yolo-doc/blob/master/docs/source_code_interpretation/utils/general_py.md
from utils.general import check_img_size # check_suffix,
from utils.general import (
LOGGER,
check_dataset,
check_file,
check_git_status,
check_requirements,
check_yaml,
colorstr,
get_latest_run,
increment_path,
init_seeds,
intersect_dicts,
labels_to_class_weights,
labels_to_image_weights,
methods,
one_cycle,
print_args,
print_mutation,
strip_optimizer,
yaml_save,
model_save,
)
from utils.loggers import Loggers # 导入日志管理模块
from utils.loggers.wandb.wandb_utils import check_wandb_resume
from utils.loss import ComputeLoss # 导入计算Loss的模块
# 在YOLOv5中,fitness函数实现对 [P, R, mAP@.5, mAP@.5-.95] 指标进行加权
from utils.metrics import fitness
from utils.oneflow_utils import EarlyStopping, ModelEMA, de_parallel, select_device, smart_DDP, smart_optimizer, smart_resume # 导入早停机制模块,模型滑动平均更新模块,解分布式模块,智能选择设备,智能优化器以及智能断点续训模块等
from utils.plots import plot_evolve, plot_labels
# LOCAL_RANK:当前进程对应的GPU号。
LOCAL_RANK = int(os.getenv("LOCAL_RANK", -1)) # https://pytorch.org/docs/stable/elastic/run.html
# RANK:当前进程的序号,用于进程间通讯,rank = 0 的主机为 master 节点。
RANK = int(os.getenv("RANK", -1))
# WORLD_SIZE:总的进程数量 (原则上第一个process占用一个GPU是较优的)。
WORLD_SIZE = int(os.getenv("WORLD_SIZE", 1))
# Linux 下:
# FILE = 'path/to/one-yolov5/train.py'
# 将'path/to/one-yolov5'加入系统的环境变量 该脚本结束后失效。
FILE = Path(__file__).resolve()
ROOT = FILE.parents[0] # YOLOv5 root directory
if str(ROOT) not in sys.path:
sys.path.append(str(ROOT)) # add ROOT to PATH
ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative
2. parse_opt 函数
这个函数用于设置opt参数
weights: 权重文件 cfg: 模型配置文件 包括nc、depth_multiple、width_multiple、anchors、backbone、head等 data: 数据集配置文件 包括path、train、val、test、nc、names、download等 hyp: 初始超参文件 epochs: 训练轮次 batch-size: 训练批次大小 img-size: 输入网络的图片分辨率大小 resume: 断点续训, 从上次打断的训练结果处接着训练 默认False nosave: 不保存模型 默认False(保存) True: only test final epoch notest: 是否只测试最后一轮 默认False True: 只测试最后一轮 False: 每轮训练完都测试mAP workers: dataloader中的最大work数(线程个数) device: 训练的设备 single-cls: 数据集是否只有一个类别 默认False rect: 训练集是否采用矩形训练 默认False 可以参考:https://start.oneflow.org/oneflow-yolo-doc/tutorials/05_chapter/rectangular_reasoning.html noautoanchor: 不自动调整anchor 默认False(自动调整anchor) evolve: 是否进行超参进化 默认False multi-scale: 是否使用多尺度训练 默认False label-smoothing: 标签平滑增强 默认0.0不增强 要增强一般就设为0.1 adam: 是否使用adam优化器 默认False(使用SGD) sync-bn: 是否使用跨卡同步BN操作, 在DDP中使用 默认False linear-lr: 是否使用linear lr 线性学习率 默认False 使用cosine lr cache-image: 是否提前缓存图片到内存cache,以加速训练 默认False image-weights: 是否使用图片加权选择策略(selection img to training by class weights) 默认False 不使用 bucket: 谷歌云盘bucket 一般用不到 project: 训练结果保存的根目录 默认是 runs/train name: 训练结果保存的目录 默认是exp 最终: runs/train/exp exist-ok: 如果文件存在就ok不存在就新建或increment name 默认False(默认文件都是不存在的) quad: dataloader取数据时, 是否使用collate_fn4代替collate_fn 默认False save_period: Log model after every "save_period" epoch, 默认-1 不需要log model 信息 artifact_alias: which version of dataset artifact to be stripped 默认lastest 貌似没用到这个参数? local_rank: 当前进程对应的GPU号。 -1且gpu=1时不进行分布式 entity: wandb entity 默认None upload_dataset: 是否上传dataset到wandb tabel(将数据集作为交互式 dsviz表 在浏览器中查看、查询、筛选和分析数据集) 默认False bbox_interval: 设置带边界框图像记录间隔 Set bounding-box image logging interval for W&B 默认-1 opt.epochs // 10 bbox_iou_optim: 这个参数代表启用oneflow针对bbox_iou部分的优化,使得训练速度更快
更多细节请点这
3 main函数
3.1 Checks
def main(opt, callbacks=Callbacks()):
# Checks
if RANK in {-1, 0}:
# 输出所有训练opt参数 train: ...
print_args(vars(opt))
# 检查代码版本是否是最新的 github: ...
check_git_status()
# 检查requirements.txt所需包是否都满足 requirements: ...
check_requirements(exclude=["thop"])
3.2 Resume
判断是否使用断点续训resume, 读取参数
使用断点续训 就从path/to/last模型文件夹中读取相关参数;不使用断点续训 就从文件中读取相关参数
# 2、判断是否使用断点续训resume, 读取参数
if opt.resume and not (check_wandb_resume(opt) or opt.evolve): # resume from specified or most recent last
# 使用断点续训 就从last模型文件夹中读取相关参数
# 如果resume是str,则表示传入的是模型的路径地址
# 如果resume是True,则通过get_lastest_run()函数找到runs文件夹中最近的权重文件last
last = Path(check_file(opt.resume) if isinstance(opt.resume, str) else get_latest_run())
opt_yaml = last.parent.parent / "opt.yaml" # train options yaml
opt_data = opt.data # original dataset
if opt_yaml.is_file():
# 相关的opt参数也要替换成last中的opt参数
with open(opt_yaml, errors="ignore") as f:
d = yaml.safe_load(f)
else:
d = flow.load(last, map_location="cpu")["opt"]
opt = argparse.Namespace(**d) # replace
opt.cfg, opt.weights, opt.resume = "", str(last), True # reinstate
if is_url(opt_data):
opt.data = check_file(opt_data) # avoid HUB resume auth timeout
else:
# 不使用断点续训 就从文件中读取相关参数
# opt.hyp = opt.hyp or ('hyp.finetune.yaml' if opt.weights else 'hyp.scratch.yaml')
opt.data, opt.cfg, opt.hyp, opt.weights, opt.project = (
check_file(opt.data),
check_yaml(opt.cfg),
check_yaml(opt.hyp),
str(opt.weights),
str(opt.project),
) # checks
assert len(opt.cfg) or len(opt.weights), "either --cfg or --weights must be specified"
if opt.evolve:
if opt.project == str(ROOT / "runs/train"): # if default project name, rename to runs/evolve
opt.project = str(ROOT / "runs/evolve")
opt.exist_ok, opt.resume = (
opt.resume,
False,
) # pass resume to exist_ok and disable resume
if opt.name == "cfg":
opt.name = Path(opt.cfg).stem # use model.yaml as name
# 根据opt.project生成目录 如: runs/train/exp18
opt.save_dir = str(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok))
3.3 DDP mode
DDP mode设置
# 3、DDP模式的设置
"""select_device
select_device 函数: 设置当前脚本的device:cpu或者cuda。
并且当且仅当使用cuda时并且有多块gpu时可以使用ddp模式,否则抛出报错信息。batch_size需要整除总的进程数量。
另外DDP模式不支持AutoBatch功能,使用DDP模式必须手动指定batch size。
"""
device = select_device(opt.device, batch_size=opt.batch_size)
if LOCAL_RANK != -1:
msg = "is not compatible with YOLOv5 Multi-GPU DDP training"
assert not opt.image_weights, f"--image-weights {msg}"
assert not opt.evolve, f"--evolve {msg}"
assert opt.batch_size != -1, f"AutoBatch with --batch-size -1 {msg}, please pass a valid --batch-size"
assert opt.batch_size % WORLD_SIZE == 0, f"--batch-size {opt.batch_size} must be multiple of WORLD_SIZE"
assert flow.cuda.device_count() > LOCAL_RANK, "insufficient CUDA devices for DDP command"
flow.cuda.set_device(LOCAL_RANK)
device = flow.device("cuda", LOCAL_RANK)
3.4Train
不使用进化算法 正常Train
# Train if not opt.evolve: # 如果不进行超参进化 那么就直接调用train()函数,开始训练 train(opt.hyp, opt, device, callbacks)
3.5 Evolve hyperparameters (optional)
遗传进化算法,先进化出最佳超参后训练
# 否则使用超参进化算法(遗传算法) 求出最佳超参 再进行训练
else:
# Hyperparameter evolution metadata (mutation scale 0-1, lower_limit, upper_limit)
# 超参进化列表 (突变规模, 最小值, 最大值)
meta = {
"lr0": (1, 1e-5, 1e-1), # initial learning rate (SGD=1E-2, Adam=1E-3)
"lrf": (1, 0.01, 1.0), # final OneCycleLR learning rate (lr0 * lrf)
"momentum": (0.3, 0.6, 0.98), # SGD momentum/Adam beta1
"weight_decay": (1, 0.0, 0.001), # optimizer weight decay
"warmup_epochs": (1, 0.0, 5.0), # warmup epochs (fractions ok)
"warmup_momentum": (1, 0.0, 0.95), # warmup initial momentum
"warmup_bias_lr": (1, 0.0, 0.2), # warmup initial bias lr
"box": (1, 0.02, 0.2), # box loss gain
"cls": (1, 0.2, 4.0), # cls loss gain
"cls_pw": (1, 0.5, 2.0), # cls BCELoss positive_weight
"obj": (1, 0.2, 4.0), # obj loss gain (scale with pixels)
"obj_pw": (1, 0.5, 2.0), # obj BCELoss positive_weight
"iou_t": (0, 0.1, 0.7), # IoU training threshold
"anchor_t": (1, 2.0, 8.0), # anchor-multiple threshold
"anchors": (2, 2.0, 10.0), # anchors per output grid (0 to ignore)
"fl_gamma": (0, 0.0, 2.0), # focal loss gamma (efficientDet default gamma=1.5)
"hsv_h": (1, 0.0, 0.1), # image HSV-Hue augmentation (fraction)
"hsv_s": (1, 0.0, 0.9), # image HSV-Saturation augmentation (fraction)
"hsv_v": (1, 0.0, 0.9), # image HSV-Value augmentation (fraction)
"degrees": (1, 0.0, 45.0), # image rotation (+/- deg)
"translate": (1, 0.0, 0.9), # image translation (+/- fraction)
"scale": (1, 0.0, 0.9), # image scale (+/- gain)
"shear": (1, 0.0, 10.0), # image shear (+/- deg)
"perspective": (0, 0.0, 0.001), # image perspective (+/- fraction), range 0-0.001
"flipud": (1, 0.0, 1.0), # image flip up-down (probability)
"fliplr": (0, 0.0, 1.0), # image flip left-right (probability)
"mosaic": (1, 0.0, 1.0), # image mixup (probability)
"mixup": (1, 0.0, 1.0), # image mixup (probability)
"copy_paste": (1, 0.0, 1.0),
} # segment copy-paste (probability)
with open(opt.hyp, errors="ignore") as f: # 载入初始超参
hyp = yaml.safe_load(f) # load hyps dict
if "anchors" not in hyp: # anchors commented in hyp.yaml
hyp["anchors"] = 3
opt.noval, opt.nosave, save_dir = (
True,
True,
Path(opt.save_dir),
) # only val/save final epoch
# ei = [isinstance(x, (int, float)) for x in hyp.values()] # evolvable indices
# evolve_yaml 超参进化后文件保存地址
evolve_yaml, evolve_csv = save_dir / "hyp_evolve.yaml", save_dir / "evolve.csv"
if opt.bucket:
os.system(f"gsutil cp gs://{opt.bucket}/evolve.csv {evolve_csv}") # download evolve.csv if exists
"""
使用遗传算法进行参数进化 默认是进化300代
这里的进化算法原理为:根据之前训练时的hyp来确定一个base hyp再进行突变,具体是通过之前每次进化得到的results来确定之前每个hyp的权重,有了每个hyp和每个hyp的权重之后有两种进化方式;
1.根据每个hyp的权重随机选择一个之前的hyp作为base hyp,random.choices(range(n), weights=w)
2.根据每个hyp的权重对之前所有的hyp进行融合获得一个base hyp,(x * w.reshape(n, 1)).sum(0) / w.sum()
evolve.txt会记录每次进化之后的results+hyp
每次进化时,hyp会根据之前的results进行从大到小的排序;
再根据fitness函数计算之前每次进化得到的hyp的权重
(其中fitness是我们寻求最大化的值。在YOLOv5中,fitness函数实现对 [P, R, mAP@.5, mAP@.5-.95] 指标进行加权。)
再确定哪一种进化方式,从而进行进化。
这部分代码其实不是很重要并且也比较难理解,大家如果没有特殊必要的话可以忽略,因为正常训练也不会用到超参数进化。
"""
for _ in range(opt.evolve): # generations to evolve
if evolve_csv.exists(): # if evolve.csv exists: select best hyps and mutate
# Select parent(s)
parent = "single" # parent selection method: 'single' or 'weighted'
x = np.loadtxt(evolve_csv, ndmin=2, delimiter=",", skiprows=1)
n = min(5, len(x)) # number of previous results to consider
# fitness是我们寻求最大化的值。在YOLOv5中,fitness函数实现对 [P, R, mAP@.5, mAP@.5-.95] 指标进行加权
x = x[np.argsort(-fitness(x))][:n] # top n mutations
w = fitness(x) - fitness(x).min() + 1e-6 # weights (sum > 0)
if parent == "single" or len(x) == 1:
# x = x[random.randint(0, n - 1)] # random selection
x = x[random.choices(range(n), weights=w)[0]] # weighted selection
elif parent == "weighted":
x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
# Mutate
mp, s = 0.8, 0.2 # mutation probability, sigma
npr = np.random
npr.seed(int(time.time()))
g = np.array([meta[k][0] for k in hyp.keys()]) # gains 0-1
ng = len(meta)
v = np.ones(ng)
while all(v == 1): # mutate until a change occurs (prevent duplicates)
v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
hyp[k] = float(x[i + 7] * v[i]) # mutate
# Constrain to limits
for k, v in meta.items():
hyp[k] = max(hyp[k], v[1]) # lower limit
hyp[k] = min(hyp[k], v[2]) # upper limit
hyp[k] = round(hyp[k], 5) # significant digits
# Train mutation
results = train(hyp.copy(), opt, device, callbacks)
# callbacks https://start.oneflow.org/oneflow-yolo-doc/source_code_interpretation/callbacks_py.html
callbacks = Callbacks()
# Write mutation results
print_mutation(results, hyp.copy(), save_dir, opt.bucket)
# Plot results
plot_evolve(evolve_csv)
LOGGER.info(f"Hyperparameter evolution finished {opt.evolve} generations
" f"Results saved to {colorstr('bold', save_dir)}
" f"Usage example: $ python train.py --hyp {evolve_yaml}")
4 def train(hyp, opt, device, callbacks):
4.1 载入参数
""" :params hyp: data/hyps/hyp.scratch.yaml hyp dictionary :params opt: main中opt参数 :params device: 当前设备 :params callbacks: 和日志相关的回调函数https://start.oneflow.org/oneflow-yolo-doc/source_code_interpretation/callbacks_py.html """ def train(hyp, opt, device, callbacks): # hyp is path/to/hyp.yaml or hyp dictionary (save_dir, epochs, batch_size, weights, single_cls, evolve, data, cfg, resume, noval, nosave, workers, freeze, bbox_iou_optim) = ( Path(opt.save_dir), opt.epochs, opt.batch_size, opt.weights, opt.single_cls, opt.evolve, opt.data, opt.cfg, opt.resume, opt.noval, opt.nosave, opt.workers, opt.freeze, opt.bbox_iou_optim, )
4.2 初始化参数和配置信息
下面输出超参数的时候截图如下:

# 和日志相关的回调函数,记录当前代码执行的阶段
callbacks.run("on_pretrain_routine_start")
# 保存权重路径 如runs/train/exp18/weights
w = save_dir / "weights" # weights dir
(w.parent if evolve else w).mkdir(parents=True, exist_ok=True) # make dir
last, best = w / "last", w / "best"
# Hyperparameters 超参
if isinstance(hyp, str):
with open(hyp, errors="ignore") as f:
# load hyps dict 加载超参信息
hyp = yaml.safe_load(f) # load hyps dict
# 日志输出超参信息 hyperparameters: ...
LOGGER.info(colorstr("hyperparameters: ") + ", ".join(f"{k}={v}" for k, v in hyp.items()))
opt.hyp = hyp.copy() # for saving hyps to checkpoints
# 保存运行时的参数配置
if not evolve:
yaml_save(save_dir / "hyp.yaml", hyp)
yaml_save(save_dir / "opt.yaml", vars(opt))
# Loggers
data_dict = None
if RANK in {-1, 0}:
# 初始化 Loggers 对象
# def __init__(self, save_dir=None, weights=None, opt=None, hyp=None, logger=None, include=LOGGERS):
loggers = Loggers(save_dir, weights, opt, hyp, LOGGER) # loggers instance
# Register actions
for k in methods(loggers):# 注册钩子 https://github.com/Oneflow-Inc/one-yolov5/blob/main/utils/callbacks.py
callbacks.register_action(k, callback=getattr(loggers, k))
# Config
# 是否需要画图: 所有的labels信息、迭代的epochs、训练结果等
plots = not evolve and not opt.noplots # create plots
cuda = device.type != "cpu"
# 初始化随机数种子
init_seeds(opt.seed + 1 + RANK, deterministic=True)
data_dict = data_dict or check_dataset(data) # check if None
train_path, val_path = data_dict["train"], data_dict["val"]
# nc: number of classes 数据集有多少种类别
nc = 1 if single_cls else int(data_dict["nc"]) # number of classes
# 如果只有一个类别并且data_dict里没有names这个key的话,我们将names设置为["item"]代表目标
names = ["item"] if single_cls and len(data_dict["names"]) != 1 else data_dict["names"] # class names
assert len(names) == nc, f"{len(names)} names found for nc={nc} dataset in {data}" # check
# 当前数据集是否是coco数据集(80个类别)
is_coco = isinstance(val_path, str) and val_path.endswith("coco/val2017.txt") # COCO dataset
4.3 model
# 检查权重命名合法性:
# 合法:pretrained = True ;
# 不合法: pretrained = False ;
pretrained = check_wights(weights)
# 载入模型
if pretrained:
# 使用预训练
# ---------------------------------------------------------#
# 加载模型及参数
ckpt = flow.load(weights, map_location="cpu") # load checkpoint to CPU to avoid CUDA memory leak
# 这里加载模型有两种方式,一种是通过opt.cfg 另一种是通过ckpt['model'].yaml
# 区别在于是否使用resume 如果使用resume会将opt.cfg设为空,按照ckpt['model'].yaml来创建模型
# 这也影响了下面是否除去anchor的key(也就是不加载anchor), 如果resume则不加载anchor
# 原因: 保存的模型会保存anchors,有时候用户自定义了anchor之后,再resume,则原来基于coco数据集的anchor会自己覆盖自己设定的anchor
# 详情参考: https://github.com/ultralytics/yolov5/issues/459
# 所以下面设置intersect_dicts()就是忽略exclude
model = Model(cfg or ckpt["model"].yaml, ch=3, nc=nc, anchors=hyp.get("anchors")).to(device) # create
exclude = ["anchor"] if (cfg or hyp.get("anchors")) and not resume else [] # exclude keys
csd = ckpt["model"].float().state_dict() # checkpoint state_dict as FP32
# 筛选字典中的键值对 把exclude删除
csd = intersect_dicts(csd, model.state_dict(), exclude=exclude) # intersect
# 载入模型权重
model.load_state_dict(csd, strict=False) # load
LOGGER.info(f"Transferred {len(csd)}/{len(model.state_dict())} items from {weights}") # report
else:
# 不使用预训练
model = Model(cfg, ch=3, nc=nc, anchors=hyp.get("anchors")).to(device) # create
# 注意一下: one-yolov5的amp训练还在开发调试中,暂时关闭,后续支持后打开。但half的推理目前我们是支持的
# amp = check_amp(model) # check AMP
amp = False
# Freeze
# 冻结权重层
# 这里只是给了冻结权重层的一个例子, 但是作者并不建议冻结权重层, 训练全部层参数, 可以得到更好的性能, 不过也会更慢
freeze = [f"model.{x}." for x in (freeze if len(freeze) > 1 else range(freeze[0]))] # layers to freeze
for k, v in model.named_parameters():
v.requires_grad = True # train all layers
# NaN to 0 (commented for erratic training results)
# v.register_hook(lambda x: torch.nan_to_num(x))
if any(x in k for x in freeze):
LOGGER.info(f"freezing {k}")
v.requires_grad = False
4.4 Optimizer
选择优化器
# Optimizer nbs = 64 # nominal batch size accumulate = max(round(nbs / batch_size), 1) # accumulate loss before optimizing hyp["weight_decay"] *= batch_size * accumulate / nbs # scale weight_decay optimizer = smart_optimizer(model, opt.optimizer, hyp["lr0"], hyp["momentum"], hyp["weight_decay"])
4.5 学习率
# Scheduler if opt.cos_lr: # 使用one cycle 学习率 https://arxiv.org/pdf/1803.09820.pdf lf = one_cycle(1, hyp["lrf"], epochs) # cosine 1->hyp['lrf'] else: # 使用线性学习率 def f(x): return (1 - x / epochs) * (1.0 - hyp["lrf"]) + hyp["lrf"] lf = f # linear # 实例化 scheduler scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf) # plot_lr_scheduler(optimizer, scheduler, epochs)
4.6 EMA
单卡训练: 使用EMA(指数移动平均)对模型的参数做平均, 一种给予近期数据更高权重的平均方法, 以求提高测试指标并增加模型鲁棒。
# EMA
ema = ModelEMA(model) if RANK in {-1, 0} else None
4.7 Resume
断点续训
# Resume best_fitness, start_epoch = 0.0, 0 if pretrained: if resume: best_fitness, start_epoch, epochs = smart_resume(ckpt, optimizer, ema, weights, epochs, resume) del ckpt, csd
4.8 SyncBatchNorm
SyncBatchNorm可以提高多gpu训练的准确性,但会显著降低训练速度。它仅适用于多GPU DistributedDataParallel 训练。
# SyncBatchNorm
if opt.sync_bn and cuda and RANK != -1:
model = flow.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
LOGGER.info("Using SyncBatchNorm()")
4.9 数据加载
# Trainloader https://start.oneflow.org/oneflow-yolo-doc/source_code_interpretation/utils/dataladers_py.html
train_loader, dataset = create_dataloader(
train_path,
imgsz,
batch_size // WORLD_SIZE,
gs,
single_cls,
hyp=hyp,
augment=True,
cache=None if opt.cache == "val" else opt.cache,
rect=opt.rect,
rank=LOCAL_RANK,
workers=workers,
image_weights=opt.image_weights,
quad=opt.quad,
prefix=colorstr("train: "),
shuffle=True,
)
labels = np.concatenate(dataset.labels, 0)
# 获取标签中最大类别值,与类别数作比较,如果大于等于类别数则表示有问题
mlc = int(labels[:, 0].max()) # max label class
assert mlc < nc, f"Label class {mlc} exceeds nc={nc} in {data}. Possible class labels are 0-{nc - 1}"
# Process 0
if RANK in {-1, 0}:
val_loader = create_dataloader(
val_path,
imgsz,
batch_size // WORLD_SIZE * 2,
gs,
single_cls,
hyp=hyp,
cache=None if noval else opt.cache,
rect=True,
rank=-1,
workers=workers * 2,
pad=0.5,
prefix=colorstr("val: "),
)[0]
# 如果不使用断点续训
if not resume:
if plots:
plot_labels(labels, names, save_dir)
# Anchors
# 计算默认锚框anchor与数据集标签框的高宽比
# 标签的高h宽w与anchor的高h_a宽h_b的比值 即h/h_a, w/w_a都要在(1/hyp['anchor_t'], hyp['anchor_t'])是可以接受的
# 如果bpr小于98%,则根据k-mean算法聚类新的锚框
if not opt.noautoanchor:
# check_anchors : 这个函数是通过计算bpr确定是否需要改变anchors 需要就调用k-means重新计算anchors。
# bpr(best possible recall): 最多能被召回的ground truth框数量 / 所有ground truth框数量 最大值为1 越大越好
# 小于0.98就需要使用k-means + 遗传进化算法选择出与数据集更匹配的anchor boxes框。
check_anchors(dataset, model=model, thr=hyp["anchor_t"], imgsz=imgsz)
model.half().float() # pre-reduce anchor precision
callbacks.run("on_pretrain_routine_end")
4.10 DDP mode
# DDP mode if cuda and RANK != -1: model = smart_DDP(model)
4.11 附加model attributes
# Model attributes nl = de_parallel(model).model[-1].nl # number of detection layers (to scale hyps) hyp["box"] *= 3 / nl # scale to layers hyp["cls"] *= nc / 80 * 3 / nl # scale to classes and layers hyp["obj"] *= (imgsz / 640) ** 2 * 3 / nl # scale to image size and layers hyp["label_smoothing"] = opt.label_smoothing model.nc = nc # attach number of classes to model model.hyp = hyp # attach hyperparameters to model # 从训练样本标签得到类别权重(和类别中的目标数即类别频率成反比) model.class_weights = labels_to_class_weights(dataset.labels, nc).to(device) * nc # attach class weights model.names = names # 获取类别名
4.12 Start training
# Start training
t0 = time.time()
nb = len(train_loader) # number of batches
# 获取预热迭代的次数iterations # number of warmup iterations, max(3 epochs, 1k iterations)
nw = max(round(hyp["warmup_epochs"] * nb), 100) # number of warmup iterations, max(3 epochs, 100 iterations)
# nw = min(nw, (epochs - start_epoch) / 2 * nb) # limit warmup to < 1/2 of training
last_opt_step = -1
# 初始化maps(每个类别的map)和results
maps = np.zeros(nc) # mAP per class
results = (0, 0, 0, 0, 0, 0, 0) # P, R, mAP@.5, mAP@.5-.95, val_loss(box, obj, cls)
# 设置学习率衰减所进行到的轮次,即使打断训练,使用resume接着训练也能正常衔接之前的训练进行学习率衰减
scheduler.last_epoch = start_epoch - 1 # do not move
# scaler = flow.cuda.amp.GradScaler(enabled=amp) 这个是和amp相关的loss缩放模块,后续one-yolv5支持好amp训练后会打开
stopper, _ = EarlyStopping(patience=opt.patience), False
# 初始化损失函数
# 这里的bbox_iou_optim是one-yolov5扩展的一个参数,可以启用更快的bbox_iou函数,模型训练速度比PyTorch更快。
compute_loss = ComputeLoss(model, bbox_iou_optim=bbox_iou_optim) # init loss class
callbacks.run("on_train_start")
# 打印日志信息
LOGGER.info(
f"Image sizes {imgsz} train, {imgsz} val
"
f"Using {train_loader.num_workers * WORLD_SIZE} dataloader workers
"
f"Logging results to {colorstr('bold', save_dir)}
"
f"Starting training for {epochs} epochs..."
)
for epoch in range(start_epoch, epochs): # epoch ------------------------------------------------------------------
callbacks.run("on_train_epoch_start")
model.train()
# Update image weights (optional, single-GPU only)
# Update image weights (optional) 并不一定好 默认是False的
# 如果为True 进行图片采样策略(按数据集各类别权重采样)
if opt.image_weights:
# 根据前面初始化的图片采样权重model.class_weights(每个类别的权重 频率高的权重小)以及maps配合每张图片包含的类别数
# 通过rando.choices生成图片索引indices从而进行采用 (作者自己写的采样策略,效果不一定ok)
cw = model.class_weights.cpu().numpy() * (1 - maps) ** 2 / nc # class weights
# labels_to_image_weights: 这个函数是利用每张图片真实gt框的真实标签labels和开始训练前通过 labels_to_class_weights函数
# 得到的每个类别的权重得到数据集中每张图片对应的权重。
# https://github.com/Oneflow-Inc/oneflow-yolo-doc/blob/master/docs/source_code_interpretation/utils/general_py.md#192-labels_to_image_weights
iw = labels_to_image_weights(dataset.labels, nc=nc, class_weights=cw) # image weights
dataset.indices = random.choices(range(dataset.n), weights=iw, k=dataset.n) # rand weighted idx
# 初始化训练时打印的平均损失信息
mloss = flow.zeros(3, device=device) # mean losses
if RANK != -1:
# DDP模式打乱数据,并且ddp.sampler的随机采样数据是基于epoch+seed作为随机种子,每次epoch不同,随机种子不同
train_loader.sampler.set_epoch(epoch)
# 进度条,方便展示信息
pbar = enumerate(train_loader)
LOGGER.info(('
' + '%11s' * 7) % ('Epoch', 'GPU_mem', 'box_loss', 'obj_loss', 'cls_loss', 'Instances', 'Size'))
if RANK in {-1, 0}:
# 创建进度条
pbar = tqdm(pbar, total=nb, bar_format="{l_bar}{bar:10}{r_bar}{bar:-10b}") # progress bar
# 梯度清零
optimizer.zero_grad()
for i, (
imgs,
targets,
paths,
_,
) in pbar: # batch -------------------------------------------------------------
callbacks.run("on_train_batch_start")
# ni: 计算当前迭代次数 iteration
ni = i + nb * epoch # number integrated batches (since train start)
imgs = imgs.to(device).float() / 255 # uint8 to float32, 0-255 to 0.0-1.0
# Warmup
# 预热训练(前nw次迭代)热身训练迭代的次数iteration范围[1:nw] 选取较小的accumulate,学习率以及momentum,慢慢的训练
if ni <= nw:
xi = [0, nw] # x interp
# compute_loss.gr = np.interp(ni, xi, [0.0, 1.0]) # iou loss ratio (obj_loss = 1.0 or iou)
accumulate = max(1, np.interp(ni, xi, [1, nbs / batch_size]).round())
for j, x in enumerate(optimizer.param_groups):
# bias lr falls from 0.1 to lr0, all other lrs rise from 0.0 to lr0
x["lr"] = np.interp(
ni,
xi,
[hyp["warmup_bias_lr"] if j == 0 else 0.0, x["initial_lr"] * lf(epoch)],
)
if "momentum" in x:
x["momentum"] = np.interp(ni, xi, [hyp["warmup_momentum"], hyp["momentum"]])
# Multi-scale 默认关闭
# Multi-scale 多尺度训练 从[imgsz*0.5, imgsz*1.5+gs]间随机选取一个尺寸(32的倍数)作为当前batch的尺寸送入模型开始训练
# imgsz: 默认训练尺寸 gs: 模型最大stride=32 [32 16 8]
if opt.multi_scale:
sz = random.randrange(imgsz * 0.5, imgsz * 1.5 + gs) // gs * gs # size
sf = sz / max(imgs.shape[2:]) # scale factor
if sf != 1:
ns = [math.ceil(x * sf / gs) * gs for x in imgs.shape[2:]] # new shape (stretched to gs-multiple)
# 下采样
imgs = nn.functional.interpolate(imgs, size=ns, mode="bilinear", align_corners=False)
# Forward
pred = model(imgs) # forward
loss, loss_items = compute_loss(pred, targets.to(device)) # loss scaled by batch_size
if RANK != -1:
loss *= WORLD_SIZE # gradient averaged between devices in DDP mode
if opt.quad:
loss *= 4.0
# Backward
# scaler.scale(loss).backward()
# Backward 反向传播
loss.backward()
# Optimize - https://pytorch.org/docs/master/notes/amp_examples.html
# 模型反向传播accumulate次(iterations)后再根据累计的梯度更新一次参数
if ni - last_opt_step >= accumulate:
# optimizer.step 参数更新
optimizer.step()
# 梯度清零
optimizer.zero_grad()
if ema:
# 当前epoch训练结束 更新ema
ema.update(model)
last_opt_step = ni
# Log
# 打印Print一些信息 包括当前epoch、显存、损失(box、obj、cls、total)、当前batch的target的数量和图片的size等信息
if RANK in {-1, 0}:
mloss = (mloss * i + loss_items) / (i + 1) # update mean losses
pbar.set_description(("%11s" + "%11.4g" * 5) % (f"{epoch}/{epochs - 1}", *mloss, targets.shape[0], imgs.shape[-1]))
# end batch ----------------------------------------------------------------
# Scheduler
lr = [x["lr"] for x in optimizer.param_groups] # for loggers
scheduler.step()
if RANK in {-1, 0}:
# mAP
callbacks.run("on_train_epoch_end", epoch=epoch)
ema.update_attr(model, include=["yaml", "nc", "hyp", "names", "stride", "class_weights"])
final_epoch = (epoch + 1 == epochs) or stopper.possible_stop
if not noval or final_epoch: # Calculate mAP
# 测试使用的是ema(指数移动平均 对模型的参数做平均)的模型
# results: [1] Precision 所有类别的平均precision(最大f1时)
# [1] Recall 所有类别的平均recall
# [1] map@0.5 所有类别的平均mAP@0.5
# [1] map@0.5:0.95 所有类别的平均mAP@0.5:0.95
# [1] box_loss 验证集回归损失, obj_loss 验证集置信度损失, cls_loss 验证集分类损失
# maps: [80] 记录每一个类别的ap值
results, maps, _ = val.run(
data_dict,
batch_size=batch_size // WORLD_SIZE * 2,
imgsz=imgsz,
half=amp,
model=ema.ema,
single_cls=single_cls,
dataloader=val_loader,
save_dir=save_dir,
plots=False,
callbacks=callbacks,
compute_loss=compute_loss,
)
# Update best mAP
# fi 是我们寻求最大化的值。在YOLOv5中,fitness函数实现对 [P, R, mAP@.5, mAP@.5-.95] 指标进行加权。
fi = fitness(np.array(results).reshape(1, -1)) # weighted combination of [P, R, mAP@.5, mAP@.5-.95]
# stop = stopper(epoch=epoch, fitness=fi) # early stop check
if fi > best_fitness:
best_fitness = fi
log_vals = list(mloss) + list(results) + lr
callbacks.run("on_fit_epoch_end", log_vals, epoch, best_fitness, fi)
# Save model
if (not nosave) or (final_epoch and not evolve): # if save
ckpt = {
"epoch": epoch,
"best_fitness": best_fitness,
"model": deepcopy(de_parallel(model)).half(),
"ema": deepcopy(ema.ema).half(),
"updates": ema.updates,
"optimizer": optimizer.state_dict(),
"wandb_id": loggers.wandb.wandb_run.id if loggers.wandb else None,
"opt": vars(opt),
"date": datetime.now().isoformat(),
}
# Save last, best and delete
model_save(ckpt, last) # flow.save(ckpt, last)
if best_fitness == fi:
model_save(ckpt, best) # flow.save(ckpt, best)
if opt.save_period > 0 and epoch % opt.save_period == 0:
print("is ok")
model_save(ckpt, w / f"epoch{epoch}") # flow.save(ckpt, w / f"epoch{epoch}")
del ckpt
# Write 将测试结果写入result.txt中
callbacks.run("on_model_save", last, epoch, final_epoch, best_fitness, fi)
# end epoch --------------------------------------------------------------------------
# end training ---------------------------------------------------------------------------
4.13 End
打印一些信息
日志: 打印训练时间、plots可视化训练结果results1.png、confusion_matrix.png 以及(‘F1’, ‘PR’, ‘P’, ‘R’)曲线变化 、日志信息
通过调用val.run() 方法验证在 coco数据集上 模型准确性 + 释放显存
Validate a model's accuracy on COCO val or test-dev datasets. Note that pycocotools metrics may be ~1% better than the equivalent repo metrics, as is visible below, due to slight differences in mAP computation.
if RANK in {-1, 0}:
LOGGER.info(f"
{epoch - start_epoch + 1} epochs completed in {(time.time() - t0) / 3600:.3f} hours")
for f in last, best:
if f.exists():
strip_optimizer(f) # strip optimizers
if f is best:
LOGGER.info(f"
Validating {f}...")
results, _, _ = val.run(
data_dict,
batch_size=batch_size // WORLD_SIZE * 2,
imgsz=imgsz,
model=attempt_load(f, device).half(),
iou_thres=0.65 if is_coco else 0.60, # best pycocotools results at 0.65
single_cls=single_cls,
dataloader=val_loader,
save_dir=save_dir,
save_json=is_coco,
verbose=True,
plots=plots,
callbacks=callbacks,
compute_loss=compute_loss,
) # val best model with plots
callbacks.run("on_train_end", last, best, plots, epoch, results)
flow.cuda.empty_cache()
return
5 run函数
封装train接口 支持函数调用执行这个train.py脚本
def run(**kwargs): # Usage: import train; train.run(data='coco128.yaml', imgsz=320, weights='yolov5m') opt = parse_opt(True) for k, v in kwargs.items(): setattr(opt, k, v) # 给opt添加属性 main(opt) return opt
6 启动训练时效果展示
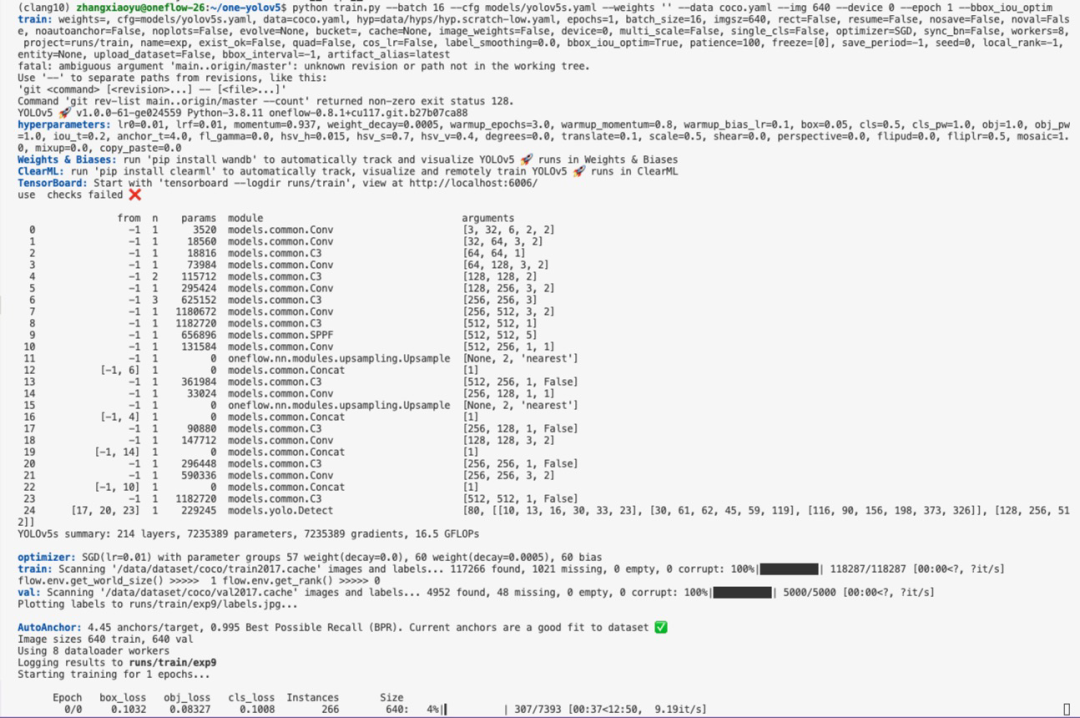
-
yolov5训练部署全链路教程2025-07-25 2205
-
在K230上部署yolov5时 出现the array is too big的原因?2025-05-28 822
-
基于YOLOv5的目标检测文档进行的时候出错如何解决?2023-09-18 622
-
yolov5和YOLOX正负样本分配策略2023-08-14 4757
-
YOLOv8+OpenCV实现DM码定位检测与解析2023-08-10 2599
-
如何YOLOv5测试代码?2023-05-18 668
-
Yolov5算法解读2023-05-17 14450
-
使用旭日X3派的BPU部署Yolov52023-04-26 2079
-
使用Yolov5 - i.MX8MP进行NPU错误检测是什么原因?2023-03-31 980
-
【YOLOv5】LabVIEW+YOLOv5快速实现实时物体识别(Object Detection)含源码2023-03-13 3589
-
YOLOv5解析之downloads.py 代码示例2022-12-30 1471
-
YOLOv5全面解析教程:计算mAP用到的numpy函数详解2022-11-21 3730
-
YOLOv5网络结构解析2022-10-31 6776
-
龙哥手把手教你学视觉-深度学习YOLOV5篇2021-09-03 8028
全部0条评论

快来发表一下你的评论吧 !
