

采用不同技术的高分辨率前照灯的设计思路
描述
高分辨率车辆前照灯将照明划分为大量可单独控制的像素,以有效的改善交通体验和辅助自动驾驶。本文首先介绍高分辨率前照灯的功能,以及相关法律法规和前照灯系统的常见要求。基于这些要求,介绍了采用不同技术的高分辨率前照灯的设计思路。
PART#01
汽车前照灯现有功能及技术
近年来,在汽车行业中,主动照明功能被认为是对传统前照灯的补充。其中针对交通区域的自适应照明,可以提高交通安全性和舒适性,此外,也有一些功能可以通过在道路上显示照明信息进行交互。下面将介绍前照灯当前和潜在的开发功能和技术。
1. 自适应前照灯系统(AFS)和自适应远光灯系统(ADB)
实际生活中,车辆将会在不同照明条件下行驶,为了适应驾驶环境并照顾其他交通参与者,引入了动态自适应的前照灯照明系统,以优化在各种场景中驾驶员视野(FoV)中的路况。同时,自适应前照灯系统还可以帮助减少不适当的交通照明造成的危险。
1)自适应前照灯系统(AFS)
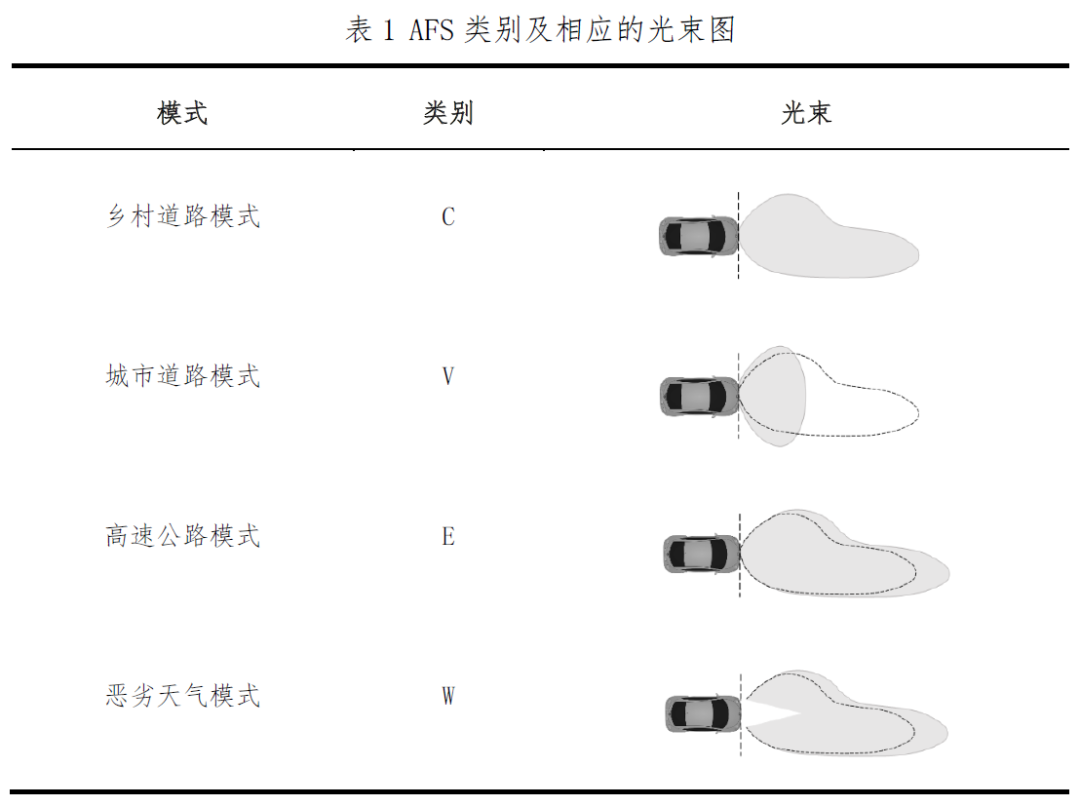
自适应前照灯系统(AFS)的研究始于20世纪90年代,在21世纪初AFS纳入联合国欧洲经济委员会(UNECE)的监管框架,2006年第一个AFS成功上市。AFS旨在修改道路上的汽车照明模式,为不同驾驶场景和道路条件下的驾驶员视野提供最佳照明性能,主要灯光模式包括大灯随动转向模式、乡村道路模式、城市道路模式、高速公路模式、恶劣天气模式等。表1中列出了不同类别AFS的光束图。
2)自适应远光灯系统(ADB)
自适应远光灯系统(ADB)是由AFS系统演变而来。ADB系统的最早定义写在UNECE第48号法规中,该法规将其定义为AFS的主光束,其光束模式适应迎面而来和前方车辆的存在,以提高驾驶员的远距离能见度,而不会对其他道路使用者造成不适、分心或眩光。除无眩光前照灯外,下一步ADB系统还将添加道路投影功能。例如,导航信息的投影、动态车道辅助(显示狭窄通道的车辆宽度)、车辆警告和状态信息的投影等。此外,道路投影还可以实现驾驶员与其他道路参与者之间的交互,通过在路面上显示文字和图像,其他道路参与者可以准确地获取车辆的意图。这种交互方式很有可能在未来自动驾驶环境中实现广泛应用。
2. 前照灯相关技术
前照灯系统的光束模式和功能可以通过高分辨率光分布覆盖整个照明区域来实现。该前照灯系统通过与车辆状态和驾驶员操作相关的各种检测传感器来评估驾驶环境中的道路场景,从而动态调整单个像素,以生成相应的照明模式。系统元件和工作流程如图1所示。
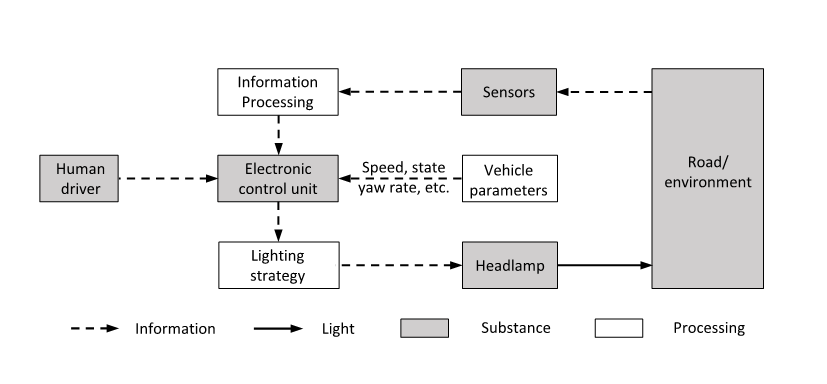
图1 高分辨率前照灯系统工作流程图
从工作过程可以看出,照明策略是由电子控制单元生成的。之后,高分辨率光分布的实现主要取决于前照灯,确切地说,取决于前照灯的调制技术。前照灯系统的调制技术包括LED阵列、微像素LED、不同的扫描技术等,采用的系统设备包括声光偏转器(AOD)、微光机电系统(MEOMS)、旋转镜、数字微镜设备(DMD)、LCD和硅上液晶(LCoS)等。高分辨率光分布调制技术的分类如图2所示。
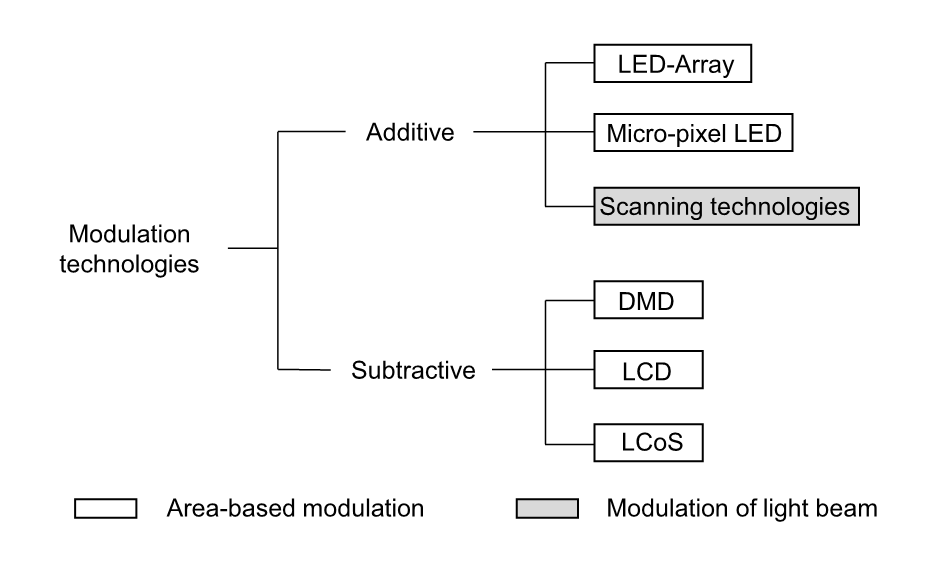
图2 高分辨率光分布调制技术分类
PART#02
汽车前照灯相关法规和要求
欧洲地区的汽车照明的标准一般采用UNECE法规,除北美外,世界上许多地区也使用该法规,或将其作为汽车照明的基础。这些法规包括车辆前照灯设计和安装的要求。在所有关于车辆前照灯的UNECE法规中,近光和远光的光分布要求作为前照灯开发和验证最重要的指南。
例如,UNECE法规第123条中关于右行交通近光的要求中提到为了评估光分布,车辆前方25m处的平面垂直屏幕被定义为2D表示。该2D表示反映了道路上的真实照明,如图3所示。该条法规定义了前照灯FoV中的照明分布(即水平FoVH和垂直FoVV方向上输出光的开启角)。H-H线和V-V线代表水平轴和垂直轴。在H-H线上方的右侧有一条截止线,该截止线与其他几条线形成一个区域(图3中的Ⅲ区),规定了该区域的最大照度值,即不得超过该值,以避免让迎面而来的司机和行人产生眩光。
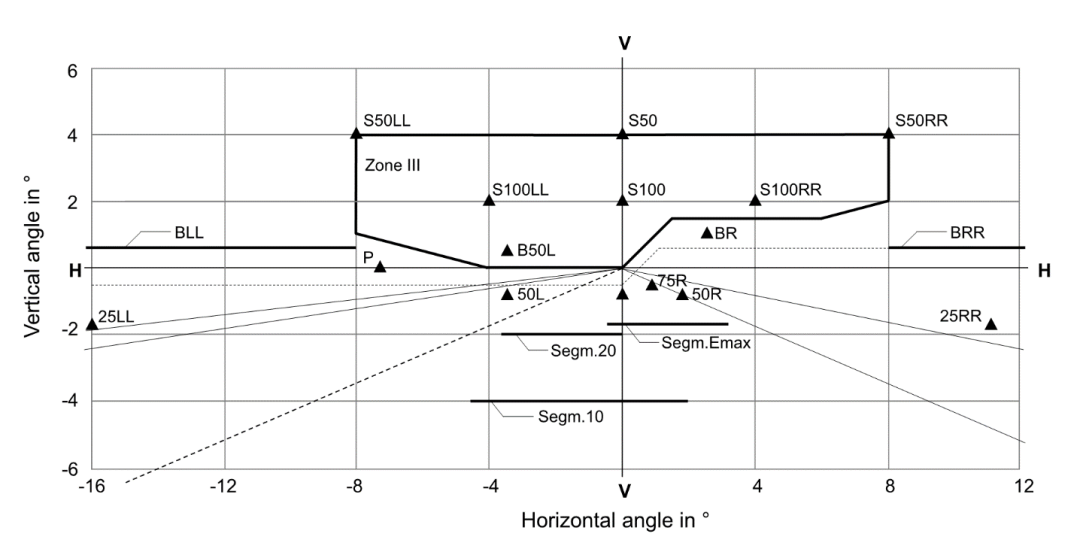
图3 右侧交通的调节近光分布表示
(UNECE R123)
此外,UNECE第113条还对远光分布进行了额外定义。规定在前照灯前方25m处安装一个垂直测量屏幕,以确定光分布。远光分布的表示如图4所示。该屏幕定义了角度方面的远光分布。与近光灯测量屏幕类似,存在与不同等级车辆的最小和最大发光强度相关的定义点。点1-5位于H-H线上,左右两侧分别以3°、6°、9°和12°的角度分布。所需的发光强度在点1处最高,因为它随着角度分布的增加而降低。此外,点6-7位于V-V线上。点6位于水平面上方2°,点7位于水平面下方4°
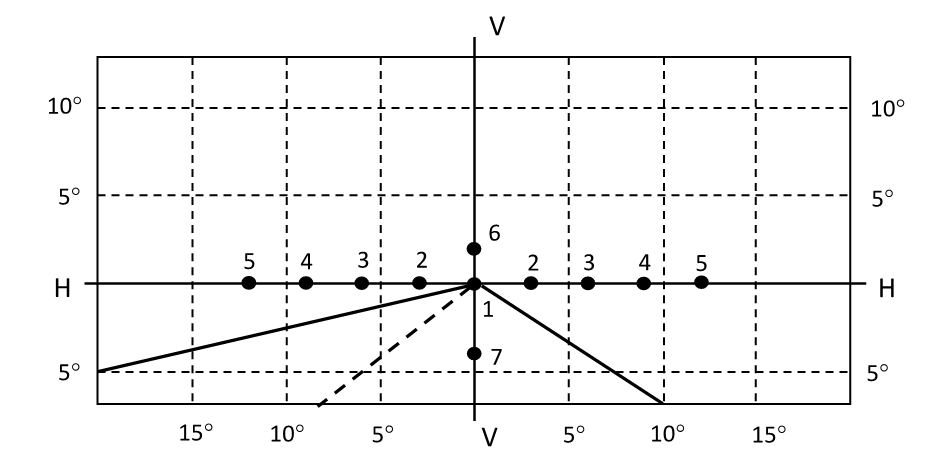
图4 右侧交通的规定远光灯分布表示
(UNECE R113)
为保证交通安全和舒适性,车辆前照灯还需要满足一些要求。例如,AFS和ADB功能可以通过高分辨率光分布覆盖整个照明区域来实现。因此,高分辨率是此类前照灯的先决条件。高分辨率带来的无眩光远光的主要优点是消眩光区域可以控制。高分辨率前照灯可以精确关闭迎面而来车辆挡风玻璃和人脸区域的像素,但仍然可以通过照亮其他部分让驾驶员注意到这些道路参与者。此外,它还实现了照射交通标志的昏暗照明区域,以避免通过反射自眩。这些去眩光功能统称为遮光。图5显示了一个类似的例子。这种精确的遮光灯在复杂的交通情况下特别有用。除此之外,道路投影功能还需要高分辨率来动态调整投影内容。

图5 交通环境中无眩光远光灯示意图
PART#03 汽车前照灯设计
1. 光源
LED和激光二极管(LDs)通常被视为当前高分辨率前照灯的光源。在AFS照明功能中运用的是基于区域的调制系统,LED和LDs都可以用作光源。由于光源的亮度应小于或等于调制器的亮度,否则就会降低效率。因此,当使用带有基于面积的调制器的LED时,必须进行预先计算。然而,LDs由于其极小的发射面积和相对狭窄的发散角而没有限制。此外,与LED相比,LDs的准高斯分布和较窄的发射发散度允许在系统中使用小型光学元件,从而在紧凑性方面具有优势。
除了从光源接收光再将调制光投射到行驶区域的调制技术外,还有一种直接照明系统,即微像素LED。该调制器本身是一种光源,其发射的光具有高分辨率分布。它通常与投影透镜系统一起工作。但由于白色LED的工作机制,投影透镜系统可能会导致对比度问题。微像素LED通过将蓝光与黄色荧光磷光体层结合来产生白光。二极管发出的蓝光部分被磷光体吸收,并被转换成更长的波长。未转换光和转换光的组合在人类视觉系统中形成白光。在大多数情况下,从磷光体表面发射具有朗伯分布的光。该工作原理如图6所示。
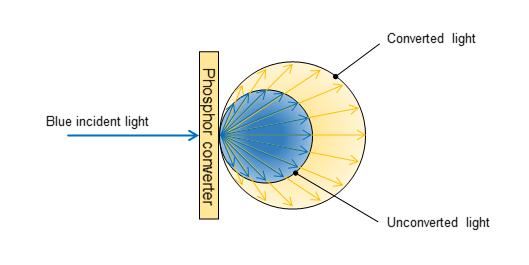
图6 微像素LED工作原理
与传统的白色LED不同,微像素LED可以照亮LED芯片上的一部分像素,而其他像素保持未激活状态。由于菲涅耳效应,微像素LED前的透镜可能会将一些蓝光从被照明像素反射到芯片表面上的未激活区域。反射的蓝光刺激磷光体,导致这些非像素产生不必要的光,如图7所示。
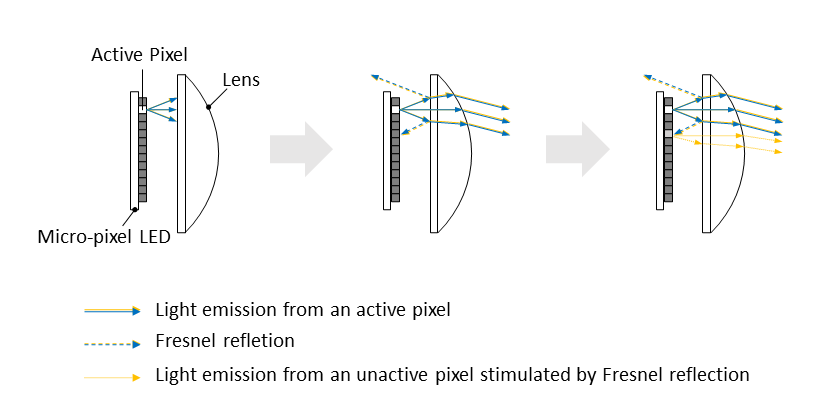
图7 微像素LED光学系统的菲涅耳反射
导致对比度降低
因为照射区域中存在应遮住的光线,所以这种现象会对前照灯的对比度性能产生负面影响。因此,应考虑采取适当的措施,例如防反射(AR)涂层。
2. 调制技术
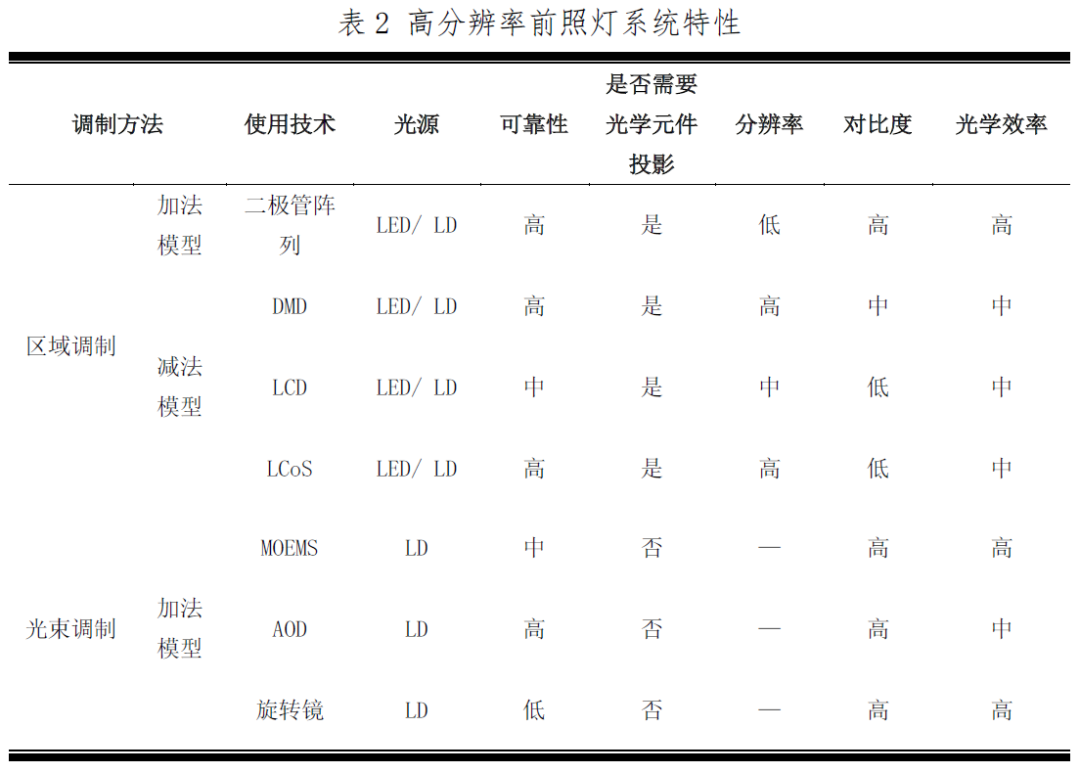
在整合前照灯系统中使用的技术时,调制技术和系统的匹配程度是主要分析和比较的部分。与当前前照灯系统中的其他光学系统相比,缺少附加光学系统会导致相对较窄的FOV。当需要更宽的视野时,仍然需要光学元件投影加以辅助(加法)。相比之下,DMD、LCD和LCoS前照灯通过遮光或滤光(减法)实现调制,这些系统必须与光学投影系统配合使用。对于使用高分辨率基于面积的调制器,由于使用减法生成照明方案和投影图案,光学效率通常低于使用加法的调制器。
总之,对于实现前照灯系统,加法和减法调制器都有其缺点。不同技术的缺点主要来自这些技术本身的工作机制,不同调制技术方面特性设计如表2所示。可根据具体设计意图选择合适的光源和调制技术作为解决方案。
PART#04 未来展望
未来,高分辨率照明功能应在无需驾驶员干预的情况下自动实,这需要多种传感器的协调。当前所谓的高级驾驶员辅助系统(ADAS)就是将不同的传感器集成到车辆上,以检测交通环境。检测到的信息可用作前照灯控制系统的输入,前照灯充当ADAS的输出设备,以便前照灯能够调节,使照明和投影照明内容适应交通场景。例如,传感器可以区分驾驶环境,以便应用AFS的不同照明模式。对车辆前方路况ADAS相应设备的协同工作如图8所示。
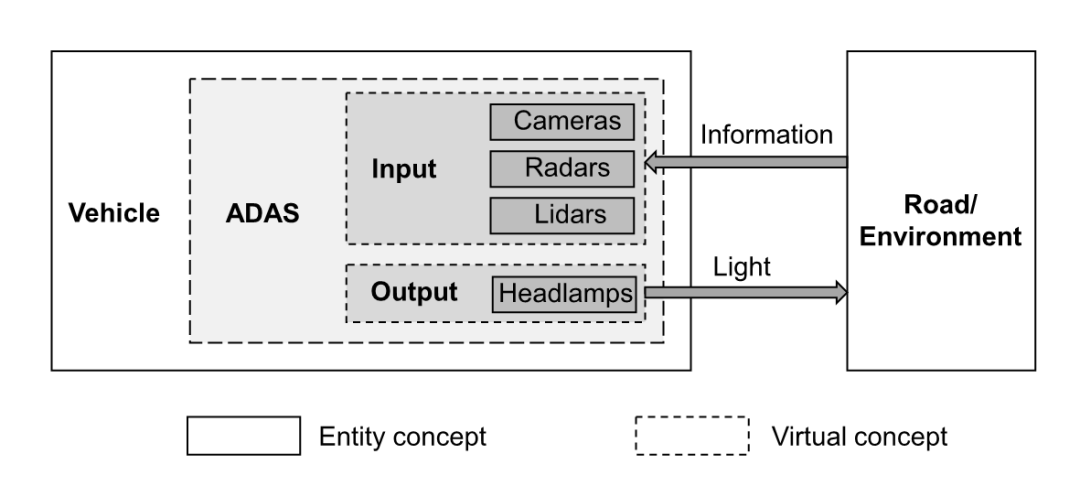
图8 ADAS协同工作示意图
审核编辑 :李倩
-
什么是高分辨率示波器?它有哪些优势?2024-08-08 2980
-
高管洞察:高分辨率音乐需要高分辨率扬声器2024-03-21 1648
-
高分辨率数字调光器2022-11-15 902
-
如何实现DCP的高分辨率控制?2021-04-27 2117
-
如何设计高速高分辨率ADC电路?2021-04-23 2860
-
前照灯领域技术带来新的变革2019-08-21 2211
-
可以使用TI DLP 技术来设计高分辨率自适应前照灯2019-04-18 1323
-
使用TI DLP技术设计高分辨率自适应前照灯2018-11-01 7781
-
增强高分辨率图像捕获的选择2018-10-25 1809
-
垂直分辨率与使用高分辨率示波器测量微小信号的介绍2017-09-29 2022
-
如何优化高分辨率DAC的DC测量2011-01-09 1191
-
超高分辨率图像实时显示系统设计2009-07-09 842
-
高速高分辨率数据采集系统2009-04-30 1019
-
采用TNETV1700的高分辨率IP电话系统设计2009-03-29 1327
全部0条评论

快来发表一下你的评论吧 !
