

在OpenCV4.5.4版本上完成YOLOv5 7.0推理演示与测试
描述
昨天发了YOLOv5 7.0支持实例分割的推文,收到不少留言问推理速度怎么样,所以我今天测试了一下,选择的是YOLOv5s的SEG模型,导出ONNX格式之后,在OpenCV4.5.4版本上完成了推理演示与测试。
ONNX格式输入与输出
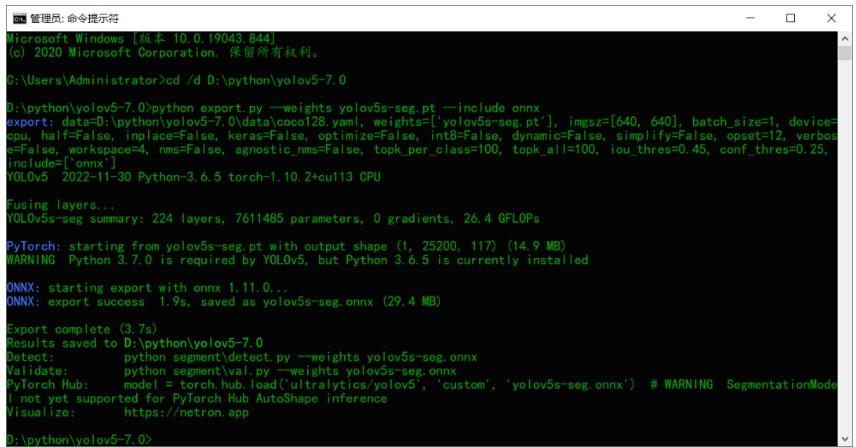
首先需要把yolov5s-seg.pt文件导出为ONNX格式,这个很简单,一条命令行搞定:
python export.py --weights yolov5s-seg.pt --include onnx
运行结果如下:
导出之后查看输入与输出格式显示如下:
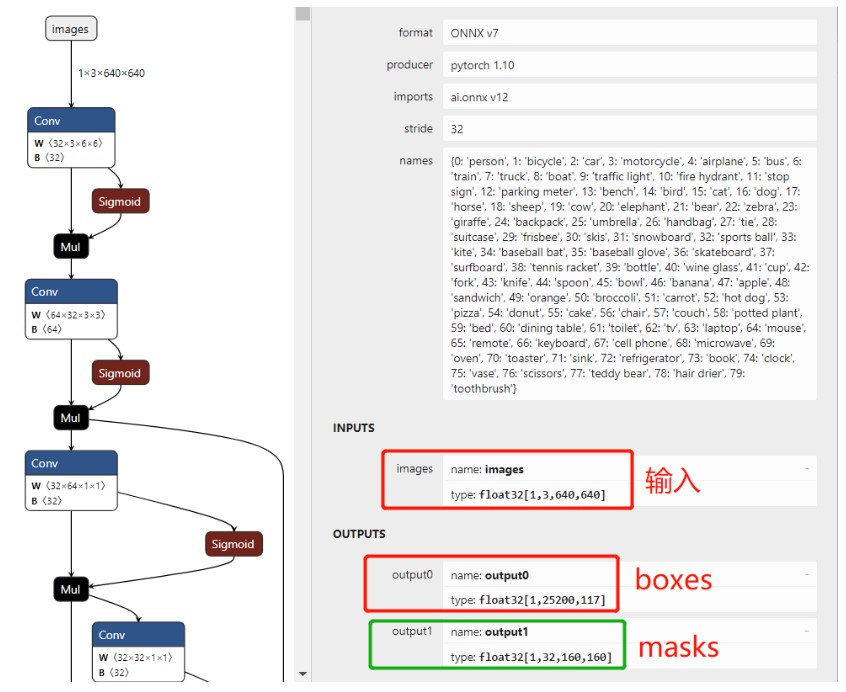
其中输入部分跟YOLOv5对象检测没有什么分别,都是NCHW格式图像输入,甚至预处理都完全一致。
输出部分内容分为两个部分,output0主要是box框架信息,跟mask预测的1x32个向量,前面85个解析跟YOLOv5对象检测完成一致,后面32向量是解析mask的时候会使用的。
output1格式是1x32x160x160, 针对每个box通过boxes部分的1x32 跟它点乘机得到1x160x160 就得到这个box对应的预测mask信息,然后根据box大小从mask中截取roi之后,叠加到输出结果上就可以了。
OpenCV DNN推理
整个代码实现部分绝大部分跟OpenCV DNN部署YOLOv5对象检测一致,需要修改的只有两个地方,一个是推理时候的预测结果,YOLOv5返回一个,这边是返回两个,所以需要修改一下代码把代码从:
def detect(image, net): # 1x3x640x640 blob = cv2.dnn.blobFromImage(image, 1 / 255.0, (INPUT_WIDTH, INPUT_HEIGHT), swapRB=True, crop=False) net.setInput(blob) preds = net.forward() return preds
修改为:
def detect(image, net): rgb = cv.cvtColor(image, cv.COLOR_BGR2RGB) input_image = cv.resize(src=rgb, dsize=(INPUT_WIDTH, INPUT_HEIGHT)) blob_img = np.float32(input_image) / 255.0 input_x = blob_img.transpose((2, 0, 1)) input_blob = np.expand_dims(input_x, 0) net.setInput(input_blob) layer = net.getUnconnectedOutLayersNames() masks, preds = net.forward(layer) return preds, masks这样就好啦 第二个改动的地方在后处理部分,如何解析出mask部分,这部分我通过翻看YOLOv5 7.0官方推理演示的源码,它是基于torch实现的,我一通猛改之后改成了基于numpy实现。生成mask的代码如下:
color_mask = np.zeros((fh, fw, 3), dtype=np.uint8) black_mask = np.zeros((fh, fw), dtype=np.float32) mv = cv.split(color_mask) for i in range(len(boxes)): x1, y1, x2, y2 = boxes[i] x1 = max(0, x1) y1 = max(0, y1) classid = class_ids[i] m1 = masks[i] mask = np.reshape(sigmoid(np.matmul(m1, mask2)), (160, 160)) mx1 = max(0, np.int((x1 * sx)/x_factor)) mx2 = max(0, np.int((x2 * sx)/x_factor)) my1 = max(0, np.int((y1 * sy)/y_factor)) my2 = max(0, np.int((y2 * sy)/y_factor)) mask_roi = mask[my1:my2,mx1:mx2] result_mask = cv.resize(mask_roi, (x2-x1, y2-y1)) result_mask[result_mask > 0.5] = 1.0 result_mask[result_mask <= 0.5] = 0.0 rh, rw = result_mask.shape if (y1+rh) >= fh: rh = fh - y1 if (x1+rw) >= fw: rw = fw - x1 black_mask[y1:y1+rh, x1:x1+rw] = result_mask[0:rh, 0:rw] mv[2][black_mask == 1], mv[1][black_mask == 1], mv[0][black_mask == 1] = [np.random.randint(0, 256), np.random.randint(0, 256), np.random.randint(0, 256)] color = colors[int(classid) % len(colors)] cv.rectangle(frame, (x1, y1), (x2, y2), color, 2) cv.rectangle(frame, (x1, y1 - 20), (x2, y1), color, -1) cv.putText(frame, class_list[classid], (x1, y1 - 10), cv.FONT_HERSHEY_SIMPLEX, .5, (0, 0, 0))
把这段代码放在NMS之后,替换YOLOv5对象检测的NMS之后的解析代码即可。最终Python版本OpenCV DNN推理的运行效果如下:
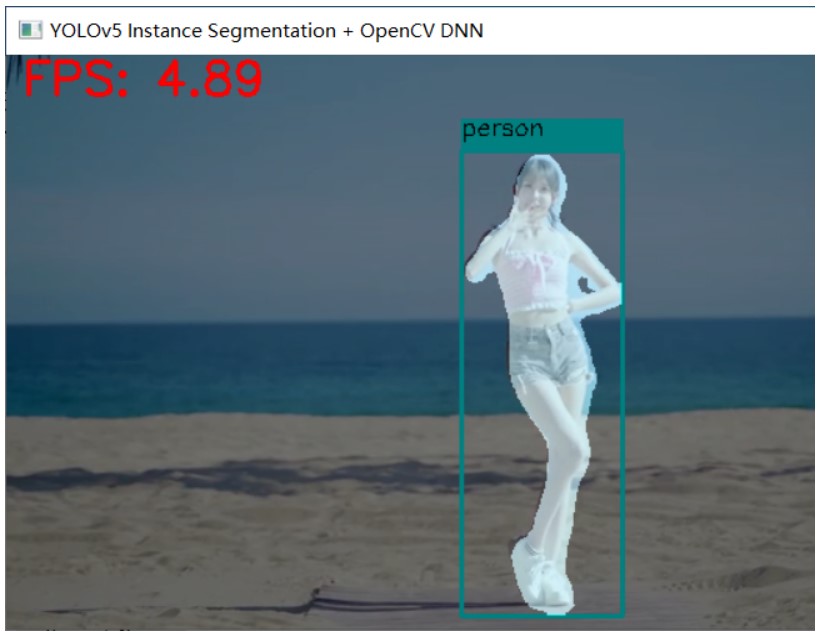
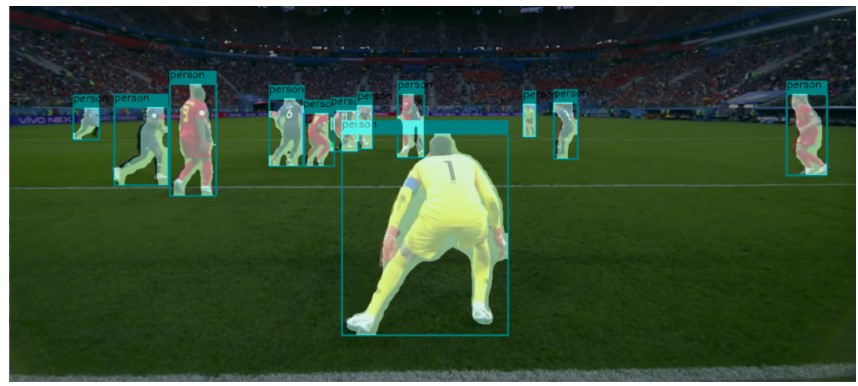
速度这么慢,怒而改成OpenCV DNN C++推理,N卡加持: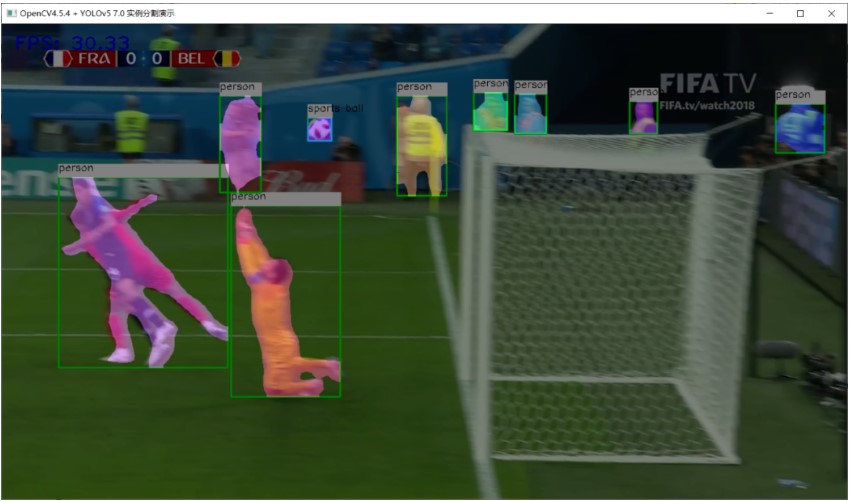
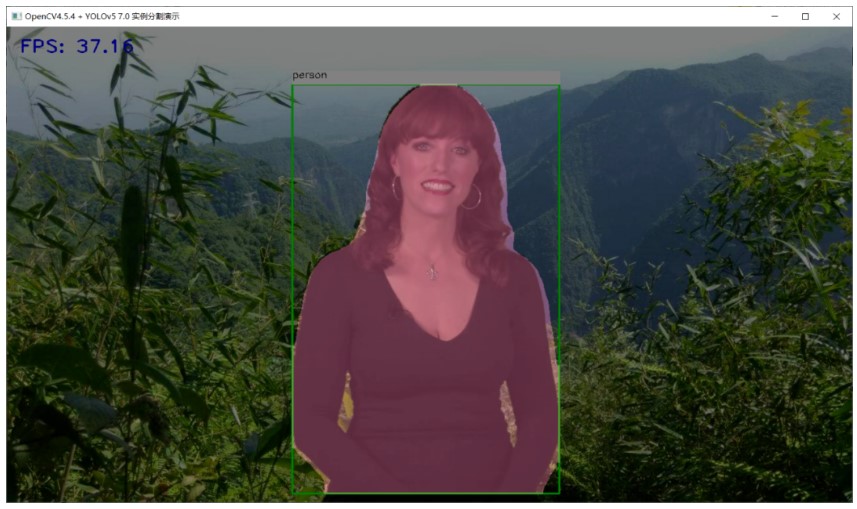
基本上可以跑到40FPS左右,感觉很不错了!
审核编辑:刘清
-
在Jetson Nano上使用TensorRT C++实现YOLOv5模型推理2022-11-17 5802
-
Yolov5算法解读2023-05-17 14450
-
在C++中使用OpenVINO工具包部署YOLOv5-Seg模型2023-12-21 4156
-
在RK3568教学实验箱上实现基于YOLOV5的算法物体识别案例详解2024-12-03 2241
-
怎样使用PyTorch Hub去加载YOLOv5模型2022-07-22 3585
-
OpenCV C++程序编译与演示2022-11-10 1830
-
如何YOLOv5测试代码?2023-05-18 668
-
YOLOv5在OpenCV上的推理程序2022-11-02 3531
-
YOLOv5 7.0版本下载与运行测试2022-11-30 6227
-
yolov5和YOLOX正负样本分配策略2023-08-14 4757
-
OpenCV4.8+YOLOv8对象检测C++推理演示2023-09-27 2942
-
基于OpenCV DNN实现YOLOv8的模型部署与推理演示2024-03-01 3673
-
yolov5训练部署全链路教程2025-07-25 2205
-
基于瑞芯微RK3576的 yolov5训练部署教程2025-09-11 3445
-
瑞芯微(EASY EAI)RV1126B yolov5训练部署教程2026-05-09 558
全部0条评论

快来发表一下你的评论吧 !
