

灵动微MM32F5270定时器单脉冲输出
描述
1
单脉冲输出
定时器单脉冲输出是比较输出应用中的一种模式,所谓的单脉冲就是通过配置定时器使其在一个可控延时后,产生一个脉宽可控的脉冲。
单脉冲模式(One Pulse Mode)下,计数器响应一个激励,产生一个脉宽可调的脉冲。配置 TIMx_CR1 寄存器的OPM=1,选择单脉冲模式,触发信号有效沿或配置 CEN=1 都可以启动计数器,直到下个更新事件发生或配置 CEN=0 时,计数器停止计数。
产生脉冲的必要条件是比较值与计数器的初始值不同,所以在计数器启动之前的必要配置如下:
递增计数方式:计数器 CNT < CCRx ≤ ARR。
递减计数方式:计数器 CNT > CCRx。

图 1 单脉冲模式
例如,在 TI2 检测到上升沿,延迟 tDELAY 之后,在 OC2 上产生一个长度为 tPULSE 的正脉冲。配置 TI2FP2 作为触发源:
1
配置 TIMx_CCMR1 寄存器中的 CC2S = 01,将 TI2FP2 映射到 TI2。
1
配置 TIMx_CCER 寄存器中的 CC2P = 0,检测 TI2FP2 的上升沿。
3
配置 TIMx_SMCR 寄存器中的 TS = 110, TI2FP2 作为从模式控制器的触发(TRGI)。
4
配置 TIMx_SMCR 寄存器中的 SMS = 110,选择触发模式, TI2FP2 使能计数器工作。
OPM 的波形由 TIMx_ARR 和 TIMx_CCR1 决定(要考虑时钟频率和计数器预分频器):由 TIMx_CCR1寄存器的值和 CNT 初始值决定触发信号与单脉冲开始之间的延迟 tDELAY, TIMx_ARR - TIMx_CCR1 的值为脉冲的宽度 tPULSE。
下面是一个产生负脉冲的例子,即发生比较匹配时产生从 1 到 0 的波形,计数器达到预装载值时产生一个从 0 到 1 的波形:
1
配置 TIMx_CCMR1 寄存器 OC1M = 111,选择 PWM 模式 2。
2
配置 TIMx_CCER 寄存器 CC1P = 1,输出低电平有效。
1
配置 TIMx_CCMR1 中 OC1PE = 1 和 TIMx_CR1 寄存器中 ARPE=1,使能预装载寄存器。
4
配置 TIMx_CCR1 寄存器和 TIMx_ARR 寄存器。
1
配置 TIMx_EGR 寄存器 UG=1 产生一个更新事件。
6
等待在 TI2 上的一个外部触发事件。
此例中, TIMx_CR1 寄存器中的 DIR=0、 CMS=0、 OPM= 1,在下一个更新事件(当计数器从自动装载值返回到 0)时停止计数。
2
实验
2.1 实验说明
配置TIM1_CH1单脉冲输出,TIM1_CH2输入捕获,TIM1从模式选择触发模式,TIM3_CH1输出PWM,触发TIM1计数器开始计数。当TIM1_CH2捕捉到有效信号时,TIM1计数器开始计数,按照配置好的脉宽,TIM1_CH1输出一个脉冲信号。
2.2 程序编写
程序部分参考MM32提供的例程,相关代码在此基础上更改。
2.21 GPIO初始化
配置PA8作为TIM1_CH1、PA9作为TIM1_CH2
void TIM1_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_GPIO_ClockCmd(GPIOA, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource8, GPIO_AF_1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_1);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPD;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
同样的,配置PB4作为TIM3_CH1,代码略。
2.22 TIM1初始化
程序中调用TIM1_Monopulse_Init()函数配置TIM1的自动预装载值为(10000-1),预分频器的值为(SystemCoreClock / 1000000 - 1),即TIM1定时器发生更新事件的周期为10ms。
TIM1_Monopulse_Init(10000 - 1, SystemCoreClock / 1000000 - 1);
在该函数中配置了TIM1_CH1输出PWM,输出信号极性为高电平有效,脉冲宽度为50%,使能TIM1单脉冲输出模式。配置TIM1_CH2输入捕获,从模式触发源选择TI2FP2作为计数器的触发输入,在信号的上升沿启动。详见函数定义如下:
void TIM1_Monopulse_Init(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_ICInitTypeDef TIM_ICInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2ENR_TIM1, ENABLE);
TIM_DeInit(TIM1);
TIM_TimeBaseStructInit(&TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Period = arr;
TIM_TimeBaseStruct.TIM_Prescaler = psc;
TIM_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStruct);
TIM_OCStructInit(&TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse = arr / 2;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OCIdleState = TIM_OCIdleState_Reset;
TIM_OC1Init(TIM1, &TIM_OCInitStruct);
TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_ICStructInit(&TIM_ICInitStruct);
TIM_ICInitStruct.TIM_Channel = TIM_Channel_2;
TIM_ICInitStruct.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStruct.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStruct.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStruct.TIM_ICFilter = 0x0;
TIM_ICInit(TIM1, &TIM_ICInitStruct);
TIM_ARRPreloadConfig(TIM1, ENABLE);
TIM_SelectOnePulseMode(TIM1, TIM_OPMode_Single);
TIM_SelectInputTrigger(TIM1, TIM_TS_TI2FP2);
TIM_SelectSlaveMode(TIM1, TIM_SlaveMode_Trigger);
TIM_SetCounter(TIM1, 0);
TIM_CtrlPWMOutputs(TIM1, ENABLE);
TIM_Cmd(TIM1, ENABLE);
}
2.23 TIM3初始化
程序中调用TIM3_PWM_Init()函数配置TIM3的自动预装载值为(10000-1),预分频器的值为(SystemCoreClock / 1000000 - 1),即TIM3定时器发生更新事件的周期为20ms。
TIM3_PWM_Init(10000 - 1, SystemCoreClock / 1000000 - 1);
在该函数中配置了TIM3_CH1输出PWM,输出信号极性为高电平有效,脉冲宽度为25%。详见函数定义如下:
void TIM3_PWM_Init(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1ENR_TIM3, ENABLE);
TIM_TimeBaseStructInit(&TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Period = arr;
TIM_TimeBaseStruct.TIM_Prescaler = psc;
TIM_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStruct);
TIM_OCStructInit(&TIM_OCInitStruct);
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse = (arr / 4) * 3;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStruct);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
TIM_SetCounter(TIM3, 0);
TIM_Cmd(TIM3, ENABLE);
}
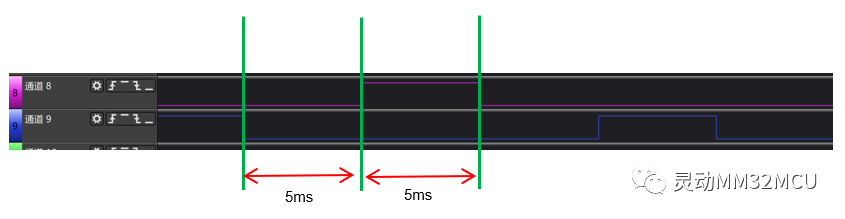
按照上述配置,PB4(TIM3_CH1)作为PA9(TIM1_CH2)的输入端,当PA9捕捉到PB4输出的PWM的上升沿时,TIM1计数器启动计数,控制延时为5ms,PA8输出一个脉宽为5ms的脉冲。
2.3 下载验证
连接PA9(TIM1_CH2)和PB4(TIM3_CH1),使用逻辑分析仪连接PA8和PA9,运行程序观测波形如下:

其中,通道8连接PA8,通道9连接PA9:

测量两段间距均为5ms,运行结果和上述配置一致。
关于灵动
上海灵动微电子股份有限公司成立于 2011 年,是中国本土领先的通用 32 位 MCU 产品及解决方案供应商。公司基于 Arm Cortex-M 系列内核开发的 MM32 MCU 产品拥有 F/L/A/SPIN/W 五大系列,目前已量产 200 多款型号,累计交付超3亿颗,每年都有近亿台配备了灵动 MM32MCU 的优秀产品交付到客户手中,在本土通用 32 位 MCU 公司中位居前列。
灵动客户涵盖智能工业、汽车电子、通信基建、医疗健康、智慧家电、物联网、个人设备、手机和电脑等应用领域。灵动是中国为数不多的同时获得了 Arm-KEIL、IAR、SEGGER 官方支持的本土 MCU 公司,并建立了独立、完整的通用 MCU 生态体系。灵动始终秉承着“诚信、承诺、创新、合作”的精神,为客户提供从硬件芯片到软件算法、从参考方案到系统设计的全方位支持。

-
【MM32F5270】Keil开发环境搭建2024-11-06 5290
-
基于MM32F5270的I2S音频播放2023-10-30 3314
-
MM32F5270 产品手册(中文版)2023-02-23 808
-
一文简析MM32F5270定时器单脉冲输出模式2022-12-30 2844
-
MM32F5270 TIM精准脉冲数量输出2022-12-09 2557
-
基于MM32F5270控制器的I2S音频播放2022-09-16 4417
-
基于MM32F5270开发板获取雨滴传感器的数据相关资料介绍2022-08-24 3522
-
MM32F5270总线架构设计2022-05-11 3198
-
STM32定时器单脉冲输出模式2021-12-08 1893
全部0条评论

快来发表一下你的评论吧 !
