

基于DSP的蓄电池充放电装置的设计
充电电路
描述
本装置采用非同步采样方法,保证了电压电流的采样值更准确,系统更加稳定。为了减少蓄电池充放电系统稳态时的噪声,提高动态响应,引入滞环PI调节器,相对于不带滞环的PI调节器,控制过程相对更为简单并且提高了系统的稳定性。本文以12V,100A·h铅酸蓄电池为例,介绍了全数字控制蓄电池充放电电路和控制方法。
1 系统主电路
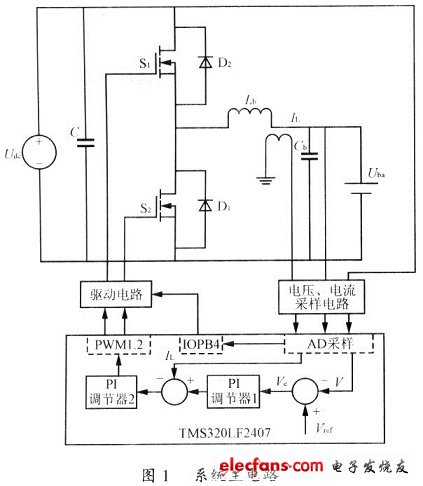
蓄电池充放电的Buck—Boost主电路和TMS320LF2407控制目标板示于图1。该电路的电流可双向流动:当电流由Udc流向Uba时,S1和D1轮番工作(S2和D2阻断),蓄电池充电;当电流由Uba流向Ude时,S2和D2轮番工作(S1和D1阻断)蓄电池放电,此时Ude变成负载。用传感器对Ude、Uba和IL进行采样送入DSP中,进行AD转换。当程序判断电路工作正常时送出电路启动信号IOPB4。在这之前电路则处于关闭的不工作状态。
2 系统控制原理
2.1控制方法简介
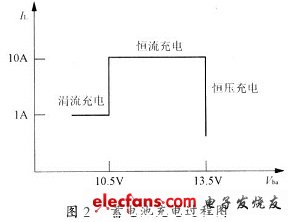
如图1所示,由传感器送来的Udc、Uba和IL三路采样信号经过DSP内部的AD模块转换。通过比较Ude和Uba电压的大小判断电路工作于充电状态还是放电状态。当Ude》Uba时,电路工作于Buck(蓄电池充电)模式。根据Uba的大小判断蓄电池工作于涓流充电、恒流充电还是恒压充电方式。12V的蓄电池实际上是由6个单体蓄电池串联而成,因此,UbaL=1.75 V×6=10.5 V;Uba_H=2.25×6=13.5V。当蓄电池电压过低,低于Uba_l,时,为了延长蓄电池寿命采用小电流对蓄电池充电,充电电流为,ILL=O.0l C。当蓄电池电压升高到UbaL时转为恒流充电,充电电流为,IL_H=O.1 C。当蓄电池电压升高到Uba_H时(13.5V),转为恒压充电,充电电压为13.5V,此时充电电流应该继续减小。这里对于12V,100A.h的蓄电池来说。C=100A。当Udc《Uba时,电路工作于Boost(蓄电池放电)模式。
2.2 三级充电模式
传统蓄电池大多采用两级充电模式,这种充电模式对于深度放电的蓄电池来说(蓄电池单体电压低于1.75V)是不够的。本装置在恒流、恒压充电模式之前增加了涓流充电模式,如图2所示。涓流充电模式对深度放电的蓄电池来说是必不可少的。
2.3 非同步采样方法
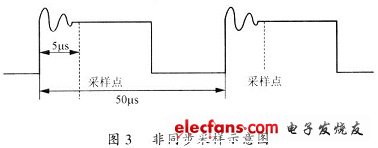
同步采样方法是在开关管开始工作时进行电压、电流采样,因为开关管动作会引起电压、电流尖峰,采样的数值就有很大偏差,造成系统不稳定,因此,采用非同步采样方法控制精度更高。如图3所示,本装置的PWM开关频率为20kHz,通过在周期中断程序中延时5μs,就可以避免开关管动作对采样值产生影响,实现非同步采样。
2.4带滞环的PI调节器
DC/DC变换器的动态和稳态调节目标不同。动态时要求系统响应快,超调量小,此时要求调节器能有效控制系统振荡,快速进入稳定状态。稳态时要求系统稳定性好,稳定范围宽。针对这两种状态,对蓄电池充放电的PI调节实行滞环调节。
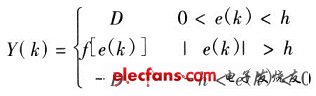
式中:f[e(k)]为PI调节函数。
当输出误差e(k)的绝对值比较小时,采用滞环两点控制;当e(k)在滞环外时(误差的绝对值较大时)采用PI调节。这样就可以既快速又平稳地调节蓄电池充放电了。
3 软件设计
采用DSP的通用定时器T1、T2分别产生PWM,、PWM2输出,控制S1、S2的开通和关断,选择连续增计数模式,产生PWM步骤如下:
1)根据载波周期设置TxPR;
2)设置TxCON寄存器以确定计数模式和时钟源,并启动PWM输出操作;
3)将对应于PWM脉冲的在线计算宽度(占空比)的值加载到TxCMPR寄存器中。
控制主程序通过比较电路两端电压Uba和Uda大小来判断蓄电池的工作方式。图4是蓄电池充电程序流程图,通过比较蓄电池电压的大小来选择充电模式。每种充电模式都包含一个滞环PI调节。图5是蓄电池放电程序流程图。图6是系统中断程序流程图,当处于蓄电池充电模式时x=1,程序返回重新比较蓄电池电压,判断充电方式,处于放电模式时x=2,程序返回重新进行PI调节。



4 试验结果
采用图1的Buc-k.Boost电路,用DSPTMS320LF2407来控制的蓄电池充放电装置,采用20kHz的采样频率。如图7所示,分别为蓄电池工作于涓流充电、恒流充电、恒压充电和放电的电压、电流波形。

5 结语
采用电流双向流动的Buck-Boost电路和16位DSP实现蓄电池充放电功能,增加了蓄电池脉冲充电模式,采用非同步采样法,运用滞环PI调节,延长了蓄电池寿命,提高了系统的控制精度和稳定度,提高了蓄电池的充电和供电质量。
-
UPS系统原理、蓄电池充放电试验及维护手册2024-02-25 2833
-
为什么要对蓄电池进行充放电和活化操作?2023-12-13 3472
-
蓄电池定期核对性充放电作业指导书2021-09-23 1255
-
蓄电池充放电电路2021-04-07 3153
-
宽量程蓄电池充放电监测仪的功能介绍2021-03-02 1593
-
关于蓄电池放电测试仪的详细介绍2021-02-26 2996
-
蓄电池放电装置怎么操作?2019-09-23 1199
-
TI中基于DSP的蓄电池充放电装置研究2018-04-09 907
-
基于PWM技术蓄电池充放电与检测系统设计2017-01-17 881
-
蓄电池在充放电时AD采样到的值虚高虚低,怎样解决?2016-07-21 4903
-
基于PWM逆变整流的蓄电池充放电装置2011-08-19 7841
-
蓄电池充放电迎来科技曙光2010-01-26 892
-
双向SPWM逆变整流蓄电池充放电维护装置2009-07-06 2371
全部0条评论

快来发表一下你的评论吧 !
