

功能安全的算法选择标准
描述
深度学习已经彻底改变了机器学习系统及其功能,但它不一定是最适合所有任务的方法。对于其他类型的应用程序,使用传统的模式识别方法(如逻辑回归、朴素贝叶斯或 k 均值聚类)可能更合适。因此,选择正确的机器学习算法的标准是必要的。这些标准描述如下。
问题的复杂性是支配选择的直接标准,它必须适合方法的复杂性。该标准可以转换为算法必须学习的参数数量。例如,逻辑回归算法学习图 8 中映射函数的两个参数。可能需要深度神经网络来学习数百万个参数,才能获得与逻辑回归方法相似的结果。图 12 第 11 页显示了根据其复杂性排序的机器学习算法的近似分布。h_θ (x)
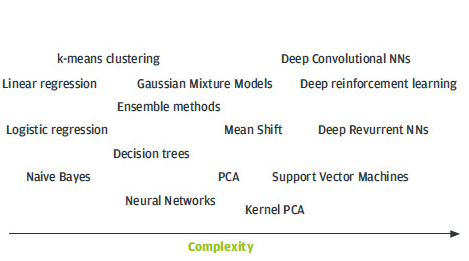
图12:基于复杂性的机器学习算法分类。
每种算法背后的数学是这一经验发现的基础。偏差-方差权衡是选择和构建机器学习系统的一个重要方面。偏差是由学习方法做出的错误假设产生的错误。它与拟合不足的问题直接相关。高偏置算法无法找到输入特征和目标标签之间的相关关系。相反,方差是衡量方法对输入数据中存在的随机噪声的敏感性的度量。高方差系统可能会导致过度拟合,其中算法对随机噪声而不是实际输入特征进行建模。在实践中,必须在偏差和方差之间进行权衡,因为这两个量彼此成正比。另一个应该考虑的标准是数据工程师在训练分类器时需要调整的调优参数的数量。
最后,还需要考虑输入数据的性质。特征空间中数据的线性分离在现实世界中是不寻常的。可以说,对于某些应用,可以假设线性。这方面的一个例子是根据第3节开头描述的大小和速度对汽车和非汽车物体进行分类。这个假设对于选择合适的机器学习方法至关重要,因为与非线性分类器相比,线性分类器对于可以线性分离的数据更快、更有效。
功能安全注意事项
功能安全是系统整体安全的一部分。ISO 26262“道路车辆 - 功能安全”描述了道路车辆电气和电子 (E/E) 系统的发展。通过各种活动或技术解决方案使系统变得安全。这些所谓的安全措施反映在指定需求、创建架构和设计以及执行验证和确认的过程活动中。
避免系统故障是ISO 26262的一个方面。人为故障是传统工程系统中的系统性故障。此类失败的一些明显示例包括:不完整的需求和测试用例,被遗忘的设计重要方面或未能发现问题的验证。使用机器学习时也是如此。此外,要学习的任务和相应的测试用例也都由人类描述。此处仍可能发生系统故障。因此,机器学习模型的开发需要应用最佳实践或适当的标准流程。仅此还不够。为了控制机器学习算法中的系统故障,需要采取安全措施,因为系统元素的部分开发将在未来通过此类算法完成。只有当两者都能得到保证时,才能消除这些故障。
最近,由于机器学习在自动驾驶系统中的使用越来越多,机器学习背景下的安全性得到了更多的关注。Amodei等人,2016年,讨论了与事故风险相关的研究问题以及解决这些问题的可能方法。传统软件系统中的代码必须满足特定的要求,这些要求随后通过标准化测试进行检查。在机器学习中,计算机可以被认为是通过学习方法接管“编程”模块的任务。这种“编程”表示在考虑第 3 节中介绍的技术背景时学习算法的参数或权重。学习过程通常是随机的,这意味着无法定义硬性要求。因此,机器学习组件是一个黑匣子系统。因此,由于其高维度和大量参数,很难甚至不可能解释学习的内容。
环境传感器和相关处理起着超出功能安全要求的决定性作用,尤其是在高度自动化驾驶的情况下。预期功能的安全性(SOTIF)涉及用于确保预期功能的安全关键方面正确执行的方法和措施,同时考虑传感器和处理算法。然而,对于传统的工程系统和机器学习系统,这个问题必须得到澄清,它仍然是正在进行的讨论的主题。
虚拟模拟器中的分析是披露此类算法的一种方法。我们将这种方法用于第2.2节中介绍的自学习系统的实验。在将机器学习系统部署到现实世界的汽车中之前,理论上可以在这样的模拟环境中学习和评估无限数量的驾驶情况。
现在,机器学习已经从游戏和模拟发展到现实世界的汽车应用,生命岌岌可危。如前所述,功能安全问题因此变得越来越重要,这也影响了科学界。一个结果是研究在模拟中对不同的机器学习和人工智能算法进行基准测试的方法。OpenAI Gym(Brockman et al. 2016)就是这样一个模拟器,它是开发和比较强化学习算法的工具包。
结论与展望
基于机器学习的功能在高度自动驾驶中的应用受到最近成就的推动。最初的原型确实产生了有希望的结果,并表明了在解决相关复杂问题时的优势。然而,即使机器学习是合适的,仍然存在大量挑战。首先有必要为给定的任务选择正确的神经网络类型。这种选择与应用学习方法、必要的预处理和训练数据的数量有关。关于将整体驱动任务分解为更小的子任务的最佳方法,仍然存在讨论。深度学习技术能够在不需要分解的情况下实现端到端方法,但目前认为这在验证和确认功能方面不太合适。机器学习社区需要开发增强的方法,尤其是为了满足功能安全要求,这是相关功能成功工业化的基础。
Elektrobit相信,尽管仍然存在挑战,但机器学习有可能重塑未来的汽车软件和系统格局。为此,已开始两个方面的调查。首先是应用基于机器学习的方法作为高度自动化驾驶场景(选定的子集)的解决方案,例如上面提到的用例。EB robinos 参考架构以及与 NVIDIA 的合作等都有助于开发环境。其次,Elektrobit 利用其在汽车软件功能安全和工业化领域的专业知识,将这些想法及其合作伙伴和客户的产品变为现实。
审核编辑:郭婷
-
预期功能安全是什么?(上)2026-04-10 266
-
加密算法的选择对于加密安全有多重要?2024-12-17 1237
-
功能安全标准在汽车芯片领域的应用2024-07-16 2092
-
ISO26262 汽车功能安全标准第二版2024-07-03 2225
-
ISO 26262:保障驾驶安全的汽车功能安全标准2023-08-29 4541
-
使用于STM32(符合IEC 61508标准)的X-CUBE-STL功能安全包适应其他安全标准2022-11-21 740
-
机器学习功能安全的算法选择标准2022-06-17 1708
-
基于物理层安全的天线选择算法2021-05-31 955
-
ISO 26262功能安全标准体系解读2019-07-22 5326
-
功能安全标准示例2018-10-30 2293
-
基于动态评价选择策略的改进人工蜂群DSABC算法2018-01-07 1406
-
数字万用表安全认证标准与安全使用2017-09-18 3758
-
如何有效使用隔离安全标准2014-08-25 2788
全部0条评论

快来发表一下你的评论吧 !
