

 【瑞萨RA4系列开发板体验】4.adc使用
【瑞萨RA4系列开发板体验】4.adc使用
电子说
1.4w人已加入
描述
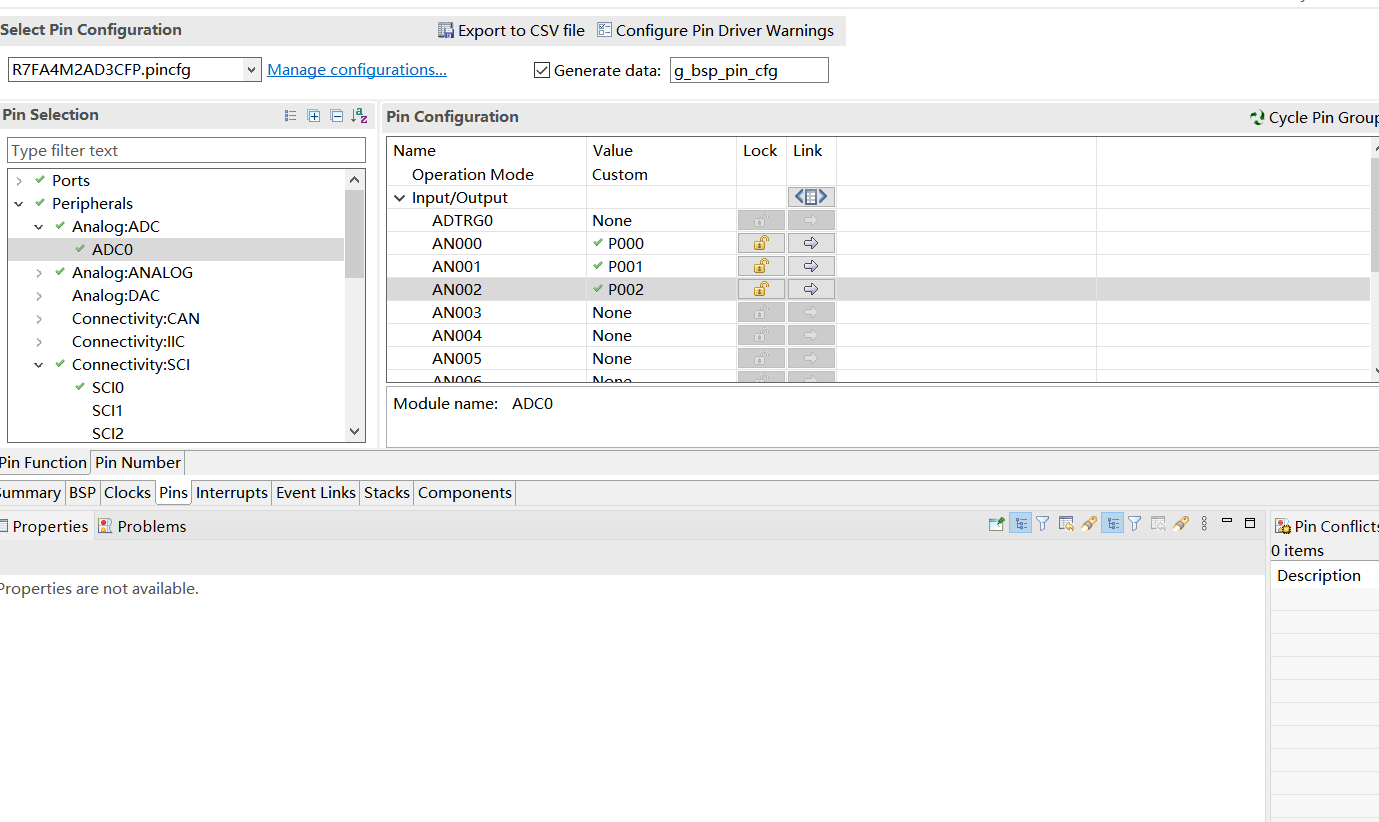
rasc 配置
1.配置adc引脚
2.配置stacks adc

2.
软件
bsp_adc0.h
#ifndef __RA4_ADC0_H__
#define __RA4_ADC0_H__
#include "hal_data.h"
#include "stdio.h"
/*adc始化 */
void adc0_Init(void);
void read_adc(void);
#endif
bsp_adc0.c
#include "bsp_adc0.h"
/*
初始化 */
void adc0_Init(void)
{
fsp_err_t err = FSP_SUCCESS;
/* 初始化adc */
err = R_ADC_Open(&g_adc0_ctrl, &g_adc0_cfg);
/* Handle any errors. This function should be defined by the user. */
if(FSP_SUCCESS != err)
{
printf("ADC0 Open API failed\\r\\n");
}
/* 配置并是能通道 */
err = R_ADC_ScanCfg(&g_adc0_ctrl, &g_adc0_channel_cfg);
assert(FSP_SUCCESS == err);
}
/*
adc中断回调 */
volatile bool scan_complete_flag = false;
void adc0_callback(adc_callback_args_t * p_args)
{
//宏将告知编译器回调函数不使用参数 p_args,从而避免编译器发出警告,
FSP_PARAMETER_NOT_USED(p_args);
scan_complete_flag = true;
}
void read_adc(void)
{
fsp_err_t err = FSP_SUCCESS;
double a0,a1,a2;
uint16_t adc_data=0;
(void) R_ADC_ScanStart(&g_adc0_ctrl);
scan_complete_flag = false;
while (!scan_complete_flag)
{
/* Wait for callback to set flag. */
}
/*
读取adc的值
*/
err = R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_0, &adc_data);
assert(FSP_SUCCESS == err);
a0=(double)(adc_data/4095.0)*3.3;
err = R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_1, &adc_data);
assert(FSP_SUCCESS == err);
a1=(double)(adc_data/4095.0)*3.3;
err = R_ADC_Read(&g_adc0_ctrl, ADC_CHANNEL_2, &adc_data);
assert(FSP_SUCCESS == err);
a2=(double)(adc_data/4095.0)*3.3;
printf("ch0 %f ch2 %f ch3 %fv: %.02f \\r\\n",a0,a1,a2);
}
测试结果

审核编辑 黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
【RA4E2开发板评测】ADC+DAC2025-09-02 2542
-
【RA4M2设计挑战赛】1. RASC配置FreeRTOS2023-02-11 2181
-
【瑞萨RA4系列开发板体验】体验过程2022-12-18 2764
-
【瑞萨RA4系列开发板体验】我的小小体会2022-12-13 3122
-
【瑞萨RA4系列开发板体验】1、开发板要来了(1)2022-12-12 3511
-
【瑞萨RA4系列开发板体验】开发板硬件展示(多图)2022-12-11 2828
-
【瑞萨RA4系列开发板体验】初步认识开发板2022-12-10 3199
-
【瑞萨RA4系列开发板体验】6. ADC测量摇杆模块偏移量2022-12-09 2750
-
【精品聚合】RA-Eco-RA4M2-100PIN开发板试用报告作品汇总2022-12-02 23307
全部0条评论

快来发表一下你的评论吧 !
