

 单片机DMA驱动串口过程
单片机DMA驱动串口过程
描述
先上代码:
#define COMM_COM USART2
#define COMM_COM_CLK RCC_APB1Periph_USART2
#define COMM_COM_TX_GPIO_CLK RCC_AHB1Periph_GPIOD //UART TX
#define COMM_COM_TX_PIN GPIO_Pin_5
#define COMM_COM_TX_GPIO_PORT GPIOD
#define COMM_COM_TX_SOURCE GPIO_PinSource5
#define COMM_COM_TX_AF GPIO_AF_USART2
#define COMM_COM_RX_GPIO_CLK RCC_AHB1Periph_GPIOD //UART RX
#define COMM_COM_RX_PIN GPIO_Pin_6
#define COMM_COM_RX_GPIO_PORT GPIOD
#define COMM_COM_RX_SOURCE GPIO_PinSource6
#define COMM_COM_RX_AF GPIO_AF_USART2
#define COMM_COM_IRQn USART2_IRQn
#define COMM_COM_Priority 9 //优先级
#define COMM_COM_BaudRate 115200 //波特率
#define COMM_COM_IRQHandler USART2_IRQHandler //中断函数接口(见stm32f4xx_it.c)
USART配置:
/************************************************
函数名称 :USART_COMM_Configuration
功 能 :通信串口配置
参 数 :无
返 回 值 :无
作 者 :strongerHuang
*************************************************/
void USART_COMM_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* 时钟配置 */
RCC_AHB1PeriphClockCmd(COMM_COM_TX_GPIO_CLK | COMM_COM_RX_GPIO_CLK, ENABLE);
if((USART1 == COMM_COM) || (USART6 == COMM_COM))
RCC_APB2PeriphClockCmd(COMM_COM_CLK, ENABLE);
else
RCC_APB1PeriphClockCmd(COMM_COM_CLK, ENABLE);
/* 复用配置 */
GPIO_PinAFConfig(COMM_COM_TX_GPIO_PORT, COMM_COM_TX_SOURCE, COMM_COM_TX_AF);
GPIO_PinAFConfig(COMM_COM_RX_GPIO_PORT, COMM_COM_RX_SOURCE, COMM_COM_RX_AF);
/* 引脚配置 */
GPIO_InitStructure.GPIO_Pin = COMM_COM_TX_PIN; //USART Tx
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(COMM_COM_TX_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = COMM_COM_RX_PIN; //USART Rx
GPIO_Init(COMM_COM_RX_GPIO_PORT, &GPIO_InitStructure);
/* NVIC配置 */
NVIC_InitStructure.NVIC_IRQChannel = COMM_COM_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = COMM_COM_Priority;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* USART配置 */
USART_InitStructure.USART_BaudRate = COMM_COM_BaudRate; //波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //传输位数
USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位
USART_InitStructure.USART_Parity = USART_Parity_No ; //校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发功能
USART_Init(COMM_COM, &USART_InitStructure);
USART_ClearFlag(COMM_COM, USART_FLAG_RXNE | USART_FLAG_TC);
USART_ITConfig(COMM_COM, USART_IT_RXNE, ENABLE); //接收中断
USART_DMACmd(COMM_COM, USART_DMAReq_Tx, ENABLE); //使能DMA
USART_Cmd(COMM_COM, ENABLE); //使能USART
}
DMA配置中的宏定义:
#define COMM_DR_ADDRESS ((uint32_t)USART2 + 0x04)
#define COMM_DMA DMA1
#define COMM_DMA_CLK RCC_AHB1Periph_DMA1
#define COMM_TX_DMA_CHANNEL DMA_Channel_4
#define COMM_TX_DMA_STREAM DMA1_Stream6
#define COMM_TX_DMA_FLAG_TCIF DMA_FLAG_TCIF6
#define COMM_TX_DMA_IRQn DMA1_Stream6_IRQn
#define COMM_TX_DMA_Priority 8 //优先级
#define COMM_TX_DMA_IRQHandler DMA1_Stream6_IRQHandler //中断函数接口(见stm32f4xx_it.c)
#define COMM_TX_DMA_IT_TCIF DMA_IT_TCIF6
通讯串口的配置
/************************************************
函数名称 :USART_COMM_DMA_Configuration
功 能 :通信串口的DMA配置
参 数 :无
返 回 值 :无
作 者 :strongerHuang
*************************************************/
void USART_COMM_DMA_Configuration(void)
{
DMA_InitTypeDef DMA_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* 使能时钟 */
RCC_AHB1PeriphClockCmd(COMM_DMA_CLK, ENABLE);
/* NVIC配置 */
NVIC_InitStructure.NVIC_IRQChannel = COMM_TX_DMA_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = COMM_TX_DMA_Priority;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* DMA配置 */
DMA_DeInit(COMM_TX_DMA_STREAM);
DMA_InitStructure.DMA_Channel = COMM_TX_DMA_CHANNEL; //DMA通道
DMA_InitStructure.DMA_PeripheralBaseAddr = COMM_DR_ADDRESS; //外设地址
DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)0; //内存地址(待传入参数)
DMA_InitStructure.DMA_DIR = DMA_DIR_MemoryToPeripheral; //传输方向
DMA_InitStructure.DMA_BufferSize = 0; //传输长度(待传入参数)
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设递增
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存递增
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; //数据宽度
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; //循环模式
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium; //优先级
DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Disable;
DMA_InitStructure.DMA_FIFOThreshold = DMA_FIFOThreshold_HalfFull;
DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;
DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;
DMA_Init(COMM_TX_DMA_STREAM, &DMA_InitStructure);
DMA_ClearFlag(COMM_TX_DMA_STREAM, COMM_TX_DMA_FLAG_TCIF);
DMA_ITConfig(COMM_TX_DMA_STREAM, DMA_IT_TC, ENABLE); //使能DMA传输完成中断
DMA_Cmd(COMM_TX_DMA_STREAM, DISABLE); //初始化禁止
}
j接下来实现数据发送与接收
/************************************************
函数名称 :COMM_SendBufByDMA
功 能 :通信串口通过DMA发送数据
参 数 :Buf ------ 数据(地址)
Length --- 数据长度(字节)
返 回 值 :无
作 者 :strongerHuang
*************************************************/
void COMM_SendBufByDMA(uint8_t *Buf, uint16_t Length)
{
DMA_Cmd(COMM_TX_DMA_STREAM, DISABLE); //关闭DMA
//内存地址
DMA_MemoryTargetConfig(COMM_TX_DMA_STREAM, (uint32_t)Buf, DMA_Memory_0);
DMA_SetCurrDataCounter(COMM_TX_DMA_STREAM, Length); //设置DMA传输长度
DMA_Cmd(COMM_TX_DMA_STREAM, ENABLE); //使能DMA
}
DMA是一种在嵌入式实时任务处理中常用的功能。
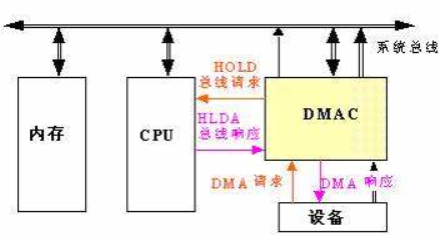
而UART发送数据包,使用DMA方式能大量减轻CPU处理的时间,使其CPU资源不被大量浪费,尤其在UART收发大量数据包(如高频率收发指令)时具有明显优势。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
基于STM32单片机DMA使用库文件设计源代码2023-04-26 878
-
STM32单片机实现DMA+ADC+UART功能2021-12-28 1423
-
STM32单片机串口空闲中断+DMA接收不定长数据2021-12-27 1429
-
C语言条件编译语句and单片机DMA的介绍2021-11-29 994
-
51单片机串口通信2021-11-18 1377
-
PIC单片机的DMA和ADC2021-11-16 1167
-
单片机的串口实验 串口介绍 串口原理2021-11-10 1749
-
什么是单片机的串口通信?2018-07-25 62525
-
基于单片机的串口双机通讯的图解2017-09-15 974
-
51单片机串口通信原理与应用2016-01-08 10566
-
基于单片机虚拟串口驱动LCD1602的电路仿真2010-08-16 1005
全部0条评论

快来发表一下你的评论吧 !
