

交流伺服系统的应用
工业控制
描述
交流伺服系统包含交流伺服驱动器和伺服电机。选用伺服系统,主要为了进行精密的定位控制,伺服驱动器在位置控制模式下运行,控制框图如图一所示。
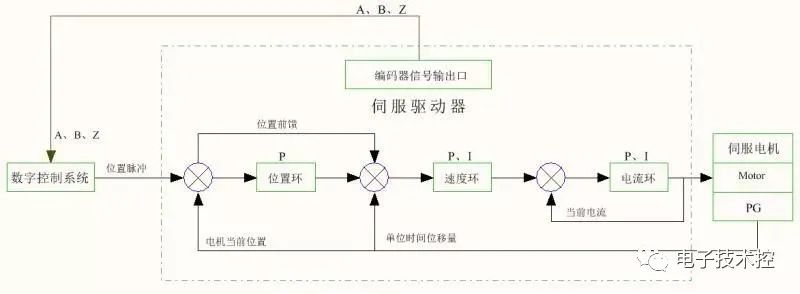
图一 位置闭环控制
一.目前常用的伺服电机是三相交流永磁同步伺服电机,这种电机具有动态特性好、定位精度高的特点。之所以称为“伺服”电机,是因为电机轴末端裝有编码器,其反馈信号可与伺服驱动器构成闭环控制。常用的编码器是光电式增量编码器,根据输出信号的不同特点,可分为6路信号标准编码器;三路信号省线式编码器;串行通信总线式编码器。
标准编码器输出信号:A、B、Z、U、V、W,其中A、B为正交编码脉冲,占空比为50%,相位差是90度电角度,根据超前、滞后关系,可区分电机正、反转;将A、B信号上升沿和下降沿均取出来,可得到4倍频脉冲信号。例如,国内常用的2500C/T编码器,四倍频后,电机旋转一圈,编码器能产生10000个反馈脉冲。
Z为零位脉冲(也称索引脉冲),每转输出一个脉冲,做定位信号;
U、V、W为检测转子磁极位置的信号,即为驱动器提供伺服电机转子的位置信息,以决定注入定子绕组电流的初始相位,保证伺服电机有足够的起动转矩。正常启动之后,伺服驱动器能用Z脉冲修正转子位置,精确的转子旋转位置由A、B信号获取,此时伺服驱动器已不再需要U、V、W信号了,这就是产生省线式编码器的原因。
省线式编码器:在同样的输出线上分时输出A、B、Z信号和U、V、W信号,虽然引出线只标注A、B、Z信号,但起动时还是先在标有A、B、Z的信号线上对应输出U、V、W信号,然后输出A、B、Z信号,使光电编码器的信号输出线减少了一半,焊接插头的工作量大大减少,出差错、出故障的概率也大大减小了。
总线式增量编码器:只需一对差分信号线,即PS+和PS-,是串行通信信号,按专有协议输出代表位置、速率、方向等信息,接线特别简洁,是技术进步的象征,很久以前安川伺服系统就采用此技术,国内应用比较晚。
光电编码器的输出信号,一般要经线驱动芯片(Line Driver),如MC3487、AM26LS31,输出差分信号,差分驱动方式是一个信号传输的好方法,它对噪声不敏感,能消除或减小共模干扰,也能抑制自身产生的电磁干扰,提高了长线传输的可靠性;在伺服驱动器端,用线接收器(Line Receiver)对编码器输出的差分进行接收,信号传输示意图如图二所示。
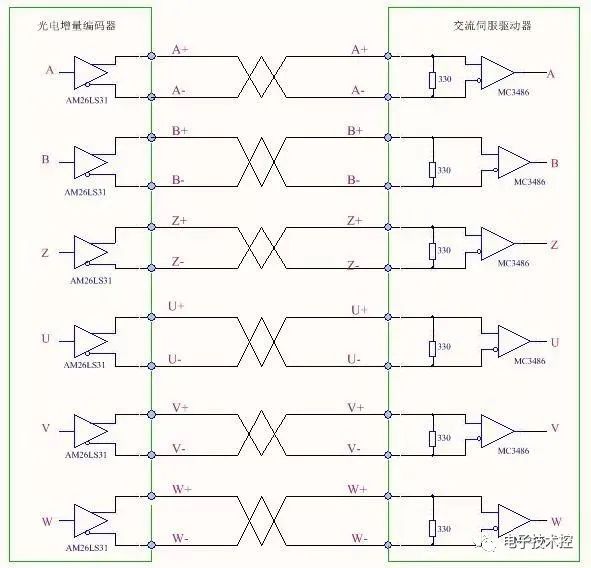
图二 编码器信号传输示意图
二.参考图一,伺服驱动器除了要接受编码器反馈信号外,在位置控制模式下还必须接收来自上层控制器的指令脉冲。上层数字控制器一般提供脉冲和方向信号,每一脉冲对应电机进给一步,方向信号以高低电平控制电机正反转;与此对应,伺服驱动器位置指令脉冲输入方式应设置为:脉冲+符号。
控制器输出的位置指令,一般是经线驱动器处理的差分对信号,而驱动器一般用高速光耦接收位置指令脉冲,参考图三。
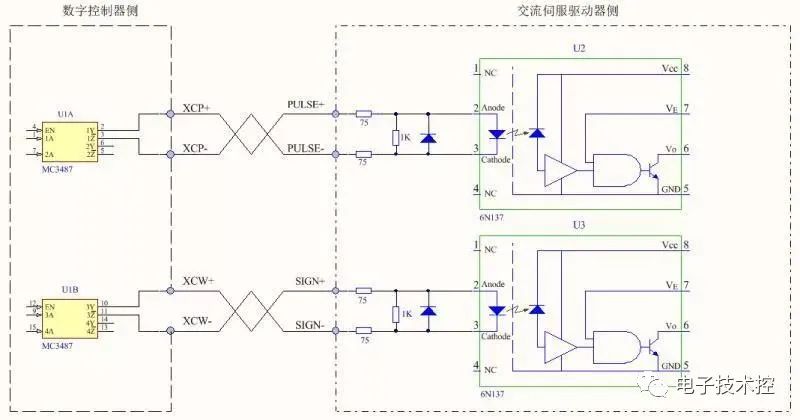
图三 位置指令脉冲传输
控制器(如数控系统、PLC、定位模块等)输出的位置指令,由伺服驱动单元来执行伺服电机的驱动。脉冲个数决定伺服电机转动的角度(或工作台移动的距离),脉冲频率决定电机的转速,在额定负载能力范围内,电机输出力矩由负载决定,负载越大则电机力矩越大。工业上常见的各种专用、通用CNC机床,伺服系统均工作于位置控制模式。
三.伺服驱动常用的数字量(开关量)输出信号有如下几个:
SRDY:伺服准备好信号。主电源正常且驱动器无报警,则输出导通(ON),否则输出截止(OFF);
COIN:定位完成信号。位置偏差小于参数设定值则ON,否则OFF;
ALM:报警信号,伺服驱动器检测到异常,输出ON,无警报则OFF,(也有无报警输出ON,故障时OFF)。
数字输出口,流行光电隔离输出,输出级与伺服单元内部电路完全隔开。伺服输出口既有固定功能输出口,也有功能可编程输出口,各厂家互不相同。
输出口的电路结构也稍有不同,可以从光耦的集电极和发射极独立输出+、-信号端子(如图四左侧电路),也可以将输出光耦的发射极于驱动器内部连接在一起,引出一个公共端子,供各数字输出口共同使用。(如图四右侧电路),光耦输出级导通时,C、E极之间大约有1V的压降,不满足TTL低电平标准,不能和TTL电路直接相连。
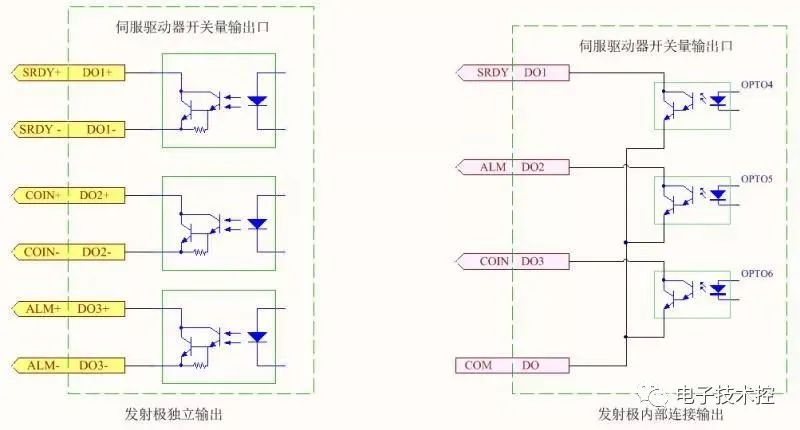
图四 数字量输出接口
四.对于开关量输入接口,常使用独立的外部开关电源对信号回路供电,控制器用继电器常开触点或开集电极三极管、光耦进行控制,如图五所示。
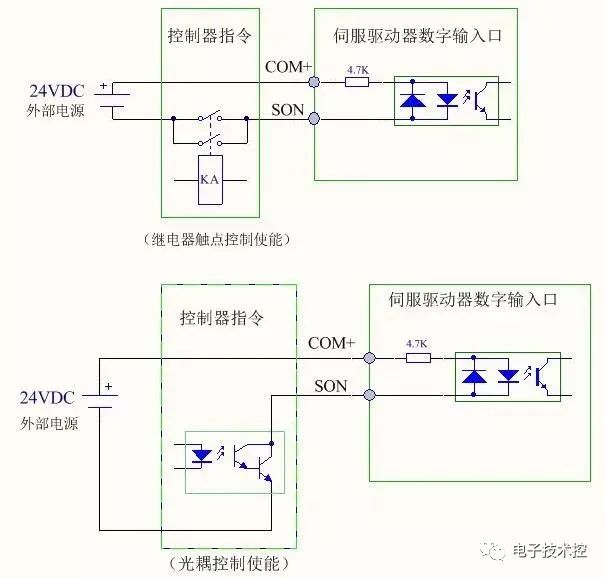
图五 数字量输入接口
继电器应选接触电阻小的微型继电器,可将两个常开点并接使用,以减小接触电阻,并增加可靠性。
数字输入口常用的信号是使能信号SON,不加使能信号,伺服电机轴不锁止,可自由转动;加上使能信号后,电机轴锁止,此时发位置脉冲,电机就会带动工作台移动;只发脉冲而不加使能信号,电机不会转动。可以用SON信号控制电机的转动和停止,但一般用脉冲控制电机启停,连续发脉冲则伺服电机连续旋转;不发脉冲电机就停转。数控系统检测到伺服驱动器报警信号或系统其它功能电路报警,都会停发脉冲并断开使能信号。
五.使用伺服系统要注意的事项:
1.伺服电机U、V、W电源线必须和驱动器U、V、W端子一一对应连接,禁止用调换端子的方法来改变电机转向,否则电机可能飞车或不转;
2.常用伺服驱动的主电源为三相AC220V,必须经三相变压器降压,将三相AC380V变至三相AC220V,切勿直接连到三相AC380V电源上;
3.伺服驱动处于承上启下的地位,接收来自伺服电机编码器的输入信号,同时又将获得的A、B信号分频后连同Z输出到上级控制器,用于位置控制环配置(注:仅部分设备需要此输出信号),一个输入一个输出,别搞混淆了;
4.如主电路电源用交流接触器来接通和分断,则接触器应选用带阻容吸收器的型号,以吸收线圈产生的浪涌电压。
审核编辑:汤梓红
-
交流伺服系统有哪些作用2024-06-11 1574
-
交流伺服系统的组成和应用2024-06-07 2799
-
交流伺服系统具有哪些优点和缺点及常见故障2023-03-07 3198
-
交流伺服系统通用技术条件资料分享2021-04-07 1101
-
现代交流伺服系统原理及控制方法2018-05-02 7601
-
基于DA200的交流伺服系统设计2017-09-26 1093
-
永磁交流伺服系统定位末端抖动抑制_杨明2017-01-08 920
-
高精度交流伺服系统的模糊PID双模控制2016-04-01 852
-
现代交流伺服系统的研究2011-07-20 995
-
永磁交流伺服系统先进控制策略研究2010-02-18 668
-
交流伺服系统在足底矫形器制造中的应用2009-08-26 754
全部0条评论

快来发表一下你的评论吧 !
