

FreeRTOS|再次移植
描述
FreeRTOS系列推文很久之前就完结了, 最近在GD32进行相关移植, 发现还有更好的移植方案, 比起直接修改启动文件更加实用, 这里只简单做下介绍和总结;
第一步: 准备一个裸机工程文件, 最好配置了GPIO和串口, 因为这两个是最方便查看效果的;
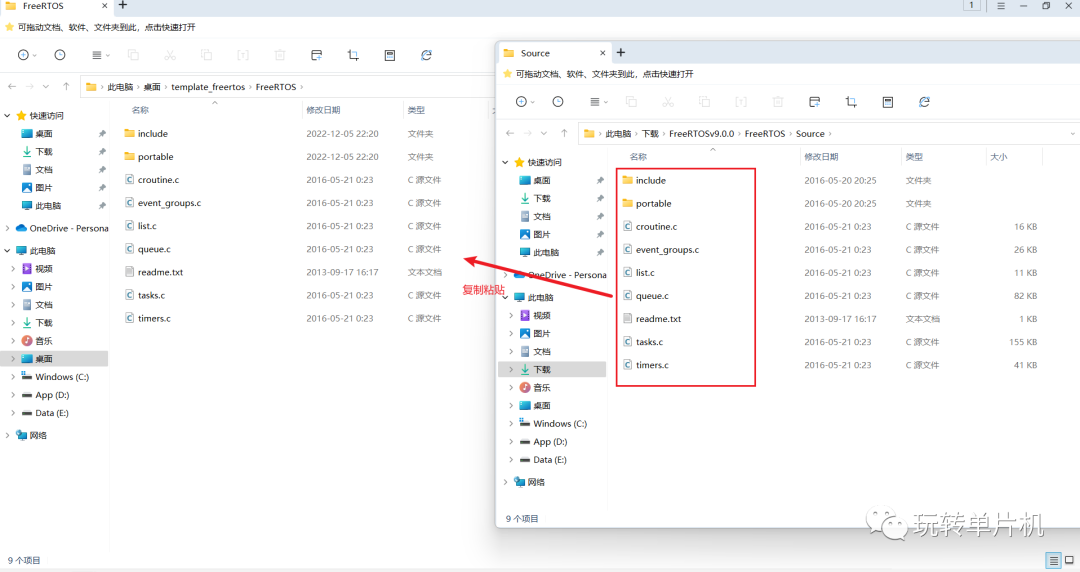
第二步:把FreeRTOS的源码直接复制到工程目录下,这样就算没安装支持包都可以直接使用,也方便相关管理和维护:
第三步: 添加分组, 然后把相关源码添加进去:
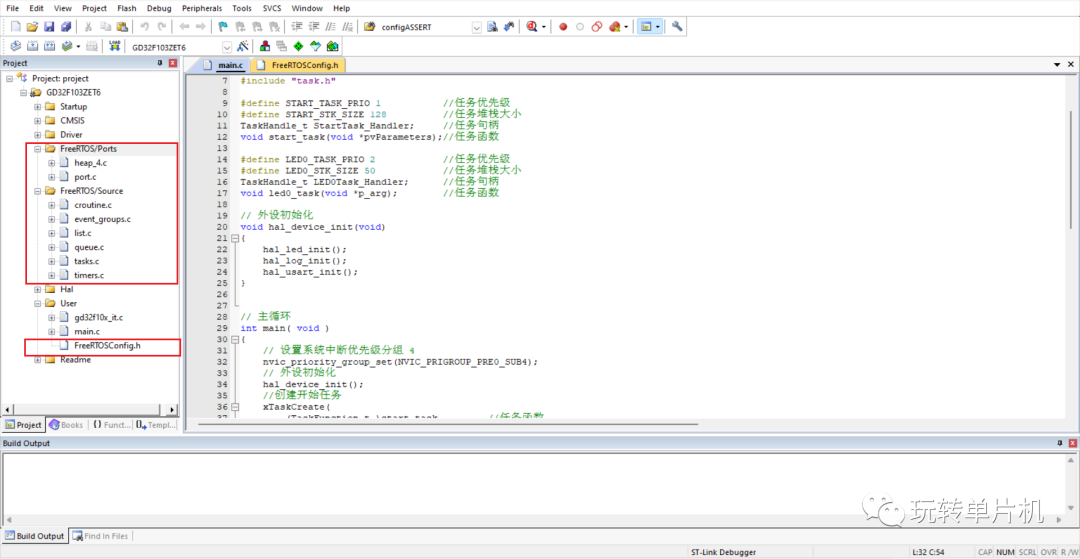
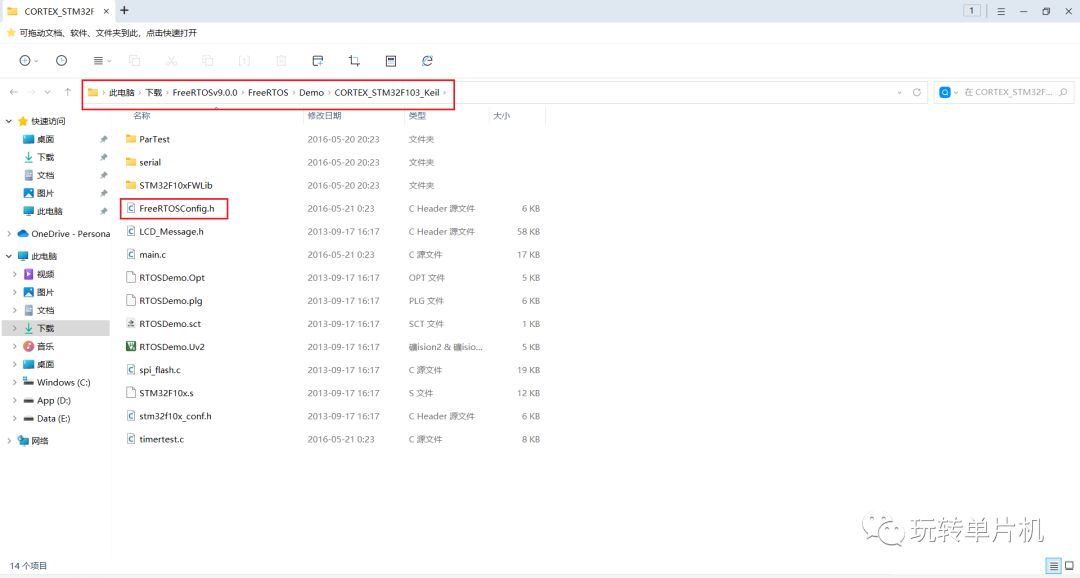
注意: 配置文件可以在官方demo中找到:
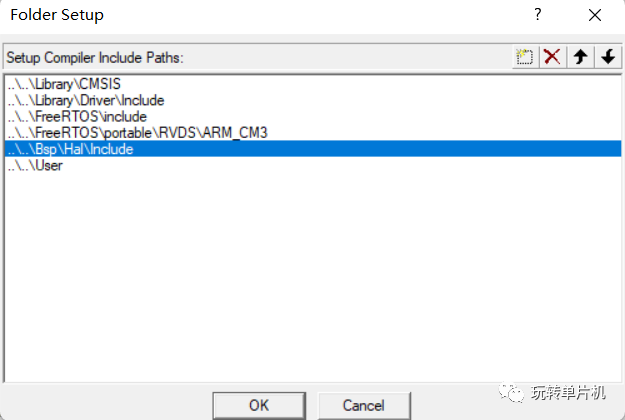
第四步: 添加路径:
第五步: 在FreeRTOSConfig.h进行适当修改:
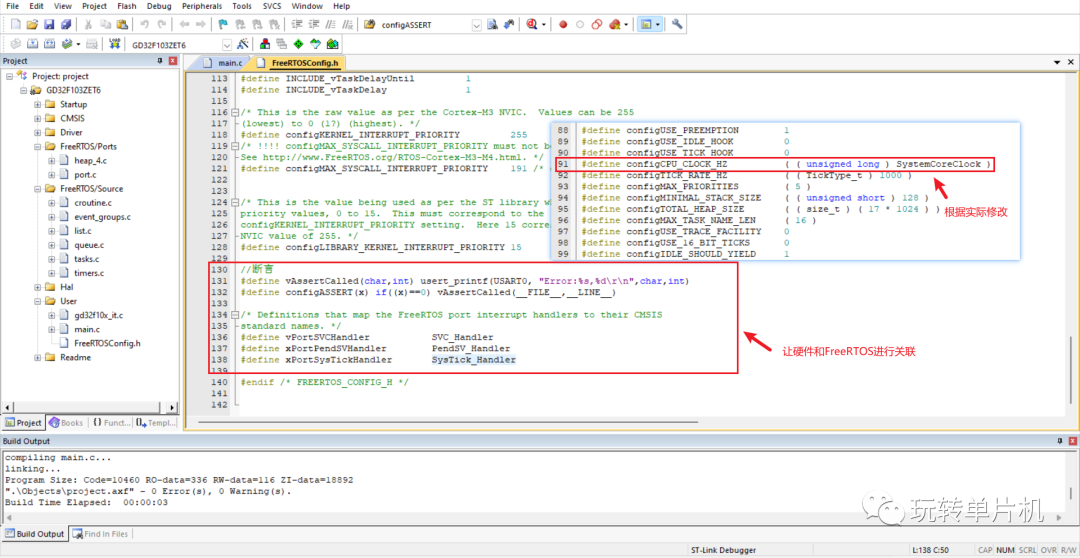
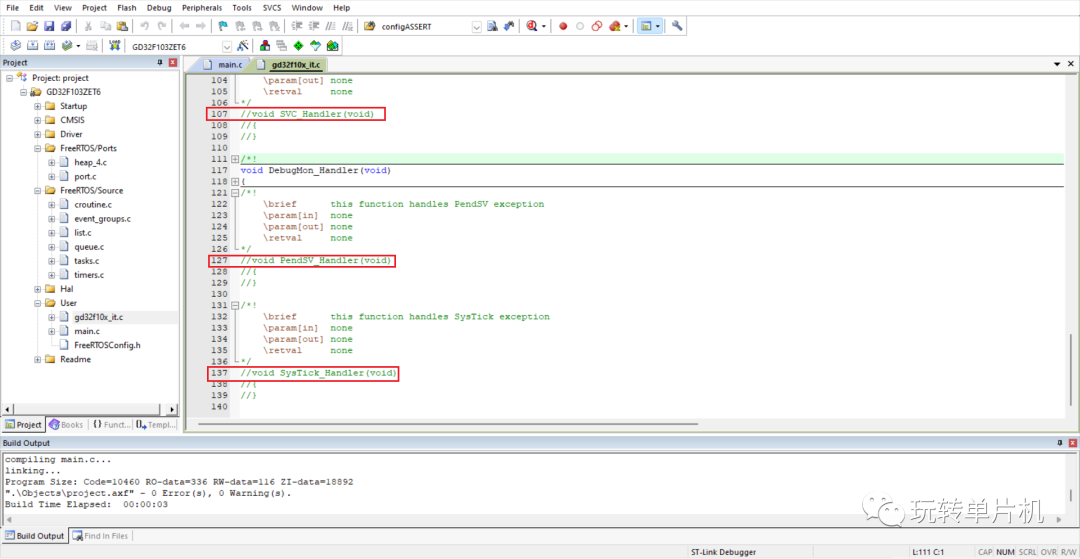
第六步: 屏蔽三个中断函数:
第七步: 编写任务函数:
#include "hal_led.h"
#include "hal_log.h"
#include "hal_usart.h"
#include "hal_printf.h"
#include "FreeRTOS.h"
#include "task.h"
#define START_TASK_PRIO 1 //任务优先级
#define START_STK_SIZE 128 //任务堆栈大小
TaskHandle_t StartTask_Handler; //任务句柄
void start_task(void *pvParameters);//任务函数
#define LED0_TASK_PRIO 2 //任务优先级
#define LED0_STK_SIZE 50 //任务堆栈大小
TaskHandle_t LED0Task_Handler; //任务句柄
void led0_task(void *p_arg); //任务函数
// 外设初始化
void hal_device_init(void)
{
hal_led_init();
hal_log_init();
hal_usart_init();
}
// 主循环
int main( void )
{
// 设置系统中断优先级分组 4
nvic_priority_group_set(NVIC_PRIGROUP_PRE0_SUB4);
// 外设初始化
hal_device_init();
//创建开始任务
xTaskCreate(
(TaskFunction_t )start_task, //任务函数
(const char* )"start_task", //任务名称
(uint16_t )START_STK_SIZE, //任务堆栈大小
(void* )NULL, //传递给任务函数的参数
(UBaseType_t )START_TASK_PRIO, //任务优先级
(TaskHandle_t* )&StartTask_Handler //任务句柄
);
vTaskStartScheduler(); //开启调度
while(1);
}
//开始任务函数
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //进入临界区
//创建 LED0 任务
xTaskCreate(
(TaskFunction_t )led0_task,
(const char* )"led0_task",
(uint16_t )LED0_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED0_TASK_PRIO,
(TaskHandle_t* )&LED0Task_Handler
);
vTaskDelete(StartTask_Handler); //删除开始任务
taskEXIT_CRITICAL(); //退出临界区
}
//LED0 任务函数
void led0_task(void *pvParameters)
{
while(1)
{
/* 测试精度*/
if(RESET == gpio_input_bit_get(GPIOC, GPIO_PIN_6)){
gpio_bit_write(GPIOC, GPIO_PIN_6, SET);
}else{
gpio_bit_write(GPIOC, GPIO_PIN_6, RESET);
}
usert_printf(USART0, "USART0
");
vTaskDelay(1000);
}
}
第八步: 看效果:
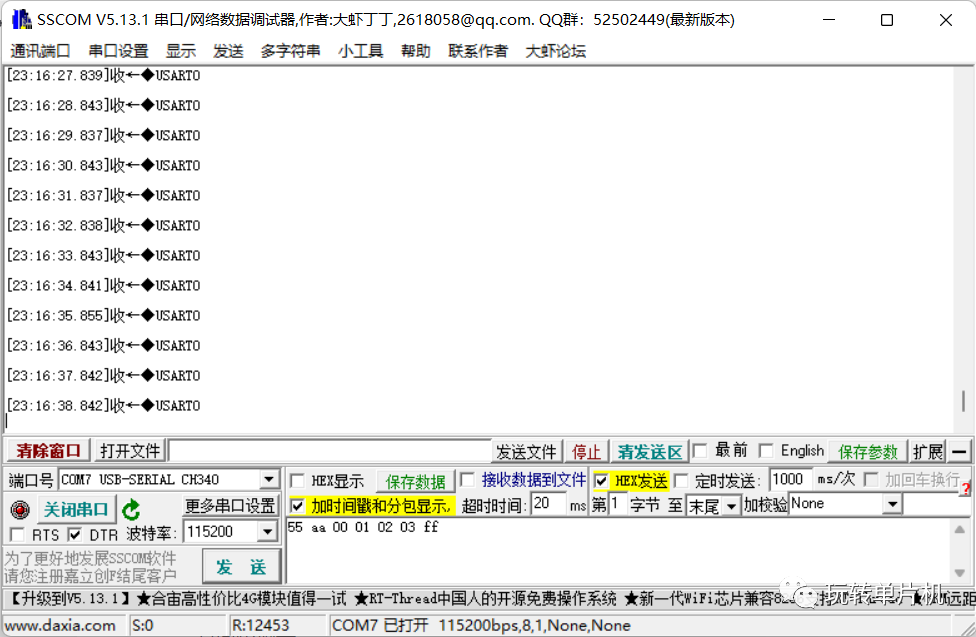
这种移植方案与以前的方案最大的不同就是不修改启动文件, 对于不懂汇编和启动文件的读者比较友好, 也比较推荐这种方案来使用FreeRTOS; 解决问题的方法千千万万, 选择自己喜欢的就好, 也没有什么不可。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
FreeRTOS的移植2023-02-14 2710
-
FreeRTOS操作系统移植文件2022-08-28 788
-
FreeRTOS移植—基于STM322021-12-04 1237
-
IAR移植FreeRTOS2021-12-03 1232
-
STM32移植FreeRTOS(图文实操)2021-11-21 1317
-
转发:stm32 移植 freertos2021-11-20 967
-
嵌入式操作系统FREERTOS的移植.2021-07-30 1525
-
freertos移植教程_freertos任务调度原理2020-04-16 13642
-
FreeRTOS移植到MAPS-资料汇总2015-12-24 910
-
FreeRTOS下对lwIP的移植程序2015-10-29 1149
全部0条评论

快来发表一下你的评论吧 !
