

 EMC 测试:CAN总线PCB设计优化
EMC 测试:CAN总线PCB设计优化
描述
CAN总线是控制器局域网络(Controller Area Network, CAN)的简称,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线。
CAN总线上任意节点可在任意时刻主动地向网络上其它节点发送信息而不分主次,因此可在各节点之间实现自由通信。低速CAN是普通CAN协议,支持500K的速率,高速CAN有CANFD协议,速率可达几M。CAN收发器TJA1044就支持CANFD。
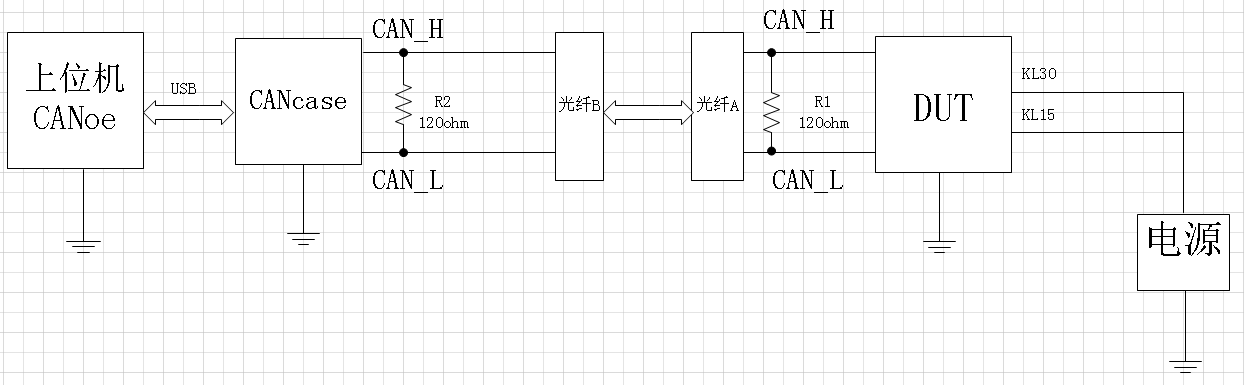
在EMC等电磁抗扰类实验中,需要监控CAN总线的通信是否受到干扰。受到干扰会导致CAN通信中断,但是产品功能异常。比如说仪表CAN中断就会导致显示异常或者直接黑屏。
所以在做这类实验时,需要用光耦进行隔离,先用一个光耦把CAN总线信号转换成光信号,通过光纤连到暗室外。在室外再通过一个光耦把光信号转换成CAN信号。
CAN_H/CAN_L线也要双绞紧密,尽量使两根线夹角接近90度。
这样来排除非实验因素对CAN总线造成的干扰。
PCB设计优化:
信号线CAN_H和CAN_L线路 layout 要等长;
信号线的长度要短;
信号线必须以最小距离平行布置;
信号线不能以90°角连接,应该使用两个135°角;
对于信号线,应尽量不使用过孔;
信号线不可互相交叉;
在总线收发器芯片和连接器之间不应该放置其它集成芯片;
共模电感必须靠近总线收发器放置,共模电感下方加GND覆铜隔离;
终端电阻需靠近总线收发器放置;
电容应该靠近接插件放置;
钳位二极管需要靠近接插件放置;
CAN控制器和收发器之间的RXD、TXD线要短;
RXD线、TXD线不可以互相交叉。
审核编辑 黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
EMC PCB设计总结2026-03-23 831
-
SN65HVD1050 EMC优化CAN总线收发器数据表2024-07-03 596
-
EMC大揭秘 PCB设计必备指南2024-06-15 4474
-
PCB设计的EMC有哪些注意事项2024-06-12 2012
-
PCB设计中的EMC问题和哪些因素有关2023-09-06 2059
-
考虑EMC的PCB设计.zip2022-12-30 660
-
PCB设计中的EMC设计指南2022-02-16 1555
-
EMC的PCB设计解析2021-01-06 3813
-
通过测试集成收发器性能实现对CAN数据总线系统的EMC进行预评价2020-03-28 4645
-
pcb设计考虑emc的接地技巧2016-03-29 939
-
EMC整改及PCB设计(培训资料)2016-03-01 1454
-
PCB设计中的EMC概念2011-11-23 3217
-
PCB的EMC设计2010-02-24 1222
-
PCB设计考虑EMC的接地技巧2009-11-17 1621
全部0条评论

快来发表一下你的评论吧 !
