

Dijkstra和A*算法及其Matlab实现
描述
写在前面的话:只是对两种路径优化算法进行简单的理解和尝试,为后续使用做准备。如果用到,请再次好好理解原理和Matlab源码。
首先给出Matlab下的三个脚本文件:
TestScript.m
% % TestScript for Assignment 1 % %% Define a small map % map = false(10); map = ans; % Add an obstacle % map (1:5, 6) = true; map = logical(map); start_coords = [1, 1]; dest_coords = [40, 20]; %% close all; % [route, numExpanded] = DijkstraGrid (map, start_coords, dest_coords); % Uncomment following line to run Astar [route, numExpanded] = AStarGrid (map, start_coords, dest_coords); %HINT: With default start and destination coordinates defined above, numExpanded for Dijkstras should be 76, numExpanded for Astar should be 23.
AStarGrid.m
function [route,numExpanded] = AStarGrid (input_map, start_coords, dest_coords) % Run A* algorithm on a grid. % Inputs : % input_map : a logical array where the freespace cells are false or 0 and % the obstacles are true or 1 % start_coords and dest_coords : Coordinates of the start and end cell % respectively, the first entry is the row and the second the column. % Output : % route : An array containing the linear indices of the cells along the % shortest route from start to dest or an empty array if there is no % route. This is a single dimensional vector % numExpanded: Remember to also return the total number of nodes % expanded during your search. Do not count the goal node as an expanded node. % set up color map for display用一个map矩阵来表示每个点的状态 % 1 - white - clear cell % 2 - black - obstacle % 3 - red = visited 相当于CLOSED列表的作用 % 4 - blue - on list 相当于OPEN列表的作用 % 5 - green - start % 6 - yellow - destination cmap = [1 1 1; ... 0 0 0; ... 1 0 0; ... 0 0 1; ... 0 1 0; ... 1 1 0; ... 0.5 0.5 0.5]; colormap(cmap); % variable to control if the map is being visualized on every % iteration drawMapEveryTime = true; [nrows, ncols] = size(input_map); % map - a table that keeps track of the state of each grid cell用来上色的 map = zeros(nrows,ncols); map(~input_map) = 1; % Mark free cells map(input_map) = 2; % Mark obstacle cells % Generate linear indices of start and dest nodes将下标转换为线性的索引值 start_node = sub2ind(size(map), start_coords(1), start_coords(2)); dest_node = sub2ind(size(map), dest_coords(1), dest_coords(2)); map(start_node) = 5; map(dest_node) = 6; % meshgrid will `replicate grid vectors' nrows and ncols to produce % a full grid % type `help meshgrid' in the Matlab command prompt for more information parent = zeros(nrows,ncols);%用来记录每个节点的父节点 % [X, Y] = meshgrid (1:ncols, 1:nrows); xd = dest_coords(1); yd = dest_coords(2); % Evaluate Heuristic function, H, for each grid cell % Manhattan distance用曼哈顿距离作为启发式函数 H = abs(X - xd) + abs(Y - yd); H = H'; % Initialize cost arrays f = Inf(nrows,ncols); g = Inf(nrows,ncols); g(start_node) = 0; f(start_node) = H(start_node); % keep track of the number of nodes that are expanded numExpanded = 0; % Main Loop while true % Draw current map map(start_node) = 5; map(dest_node) = 6; % make drawMapEveryTime = true if you want to see how the % nodes are expanded on the grid. if (drawMapEveryTime) image(1.5, 1.5, map); grid on; axis image; drawnow; end % Find the node with the minimum f value,其中的current是index值,需要转换 [min_f, current] = min(f(:)); if ((current == dest_node) || isinf(min_f)) break; end; % Update input_map map(current) = 3; f(current) = Inf; % remove this node from further consideration numExpanded=numExpanded+1; % Compute row, column coordinates of current node [i, j] = ind2sub(size(f), current); % ********************************************************************* % ALL YOUR CODE BETWEEN THESE LINES OF STARS % Visit all of the neighbors around the current node and update the % entries in the map, f, g and parent arrays % action=[-1 0; 1 0; 0 -1; 0 1];%上,下,左,右 for a=1:4 expand=[i,j]+action(a,:); expand1=expand(1,1); expand2=expand(1,2); %不超出边界,不穿越障碍,不在CLOSED列表里,也不是起点,则进行扩展 if ( expand1>=1 && expand1<=nrows && expand2>=1 && expand2<=nrows && map(expand1,expand2)~=2 && map(expand1,expand2)~=3 && map(expand1,expand2)~=5) if ( g(expand1,expand2)> g(i,j)+1 ) g(expand1,expand2)= g(i,j)+1; f(expand1,expand2)= g(expand1,expand2)+H(expand1,expand2); parent(expand1,expand2)=current; map(expand1,expand2)=4; end end end %********************************************************************* end %% Construct route from start to dest by following the parent links if (isinf(f(dest_node))) route = []; else route = [dest_node]; while (parent(route(1)) ~= 0) route = [parent(route(1)), route]; end % Snippet of code used to visualize the map and the path for k = 2:length(route) - 1 map(route(k)) = 7; pause(0.1); image(1.5, 1.5, map); grid on; axis image; end end end
DijkstraGrid.m
function [route,numExpanded] = DijkstraGrid (input_map, start_coords, dest_coords) % Run Dijkstra's algorithm on a grid. % Inputs : % input_map : a logical array where the freespace cells are false or 0 and % the obstacles are true or 1 % start_coords and dest_coords : Coordinates of the start and end cell % respectively, the first entry is the row and the second the column. % Output : % route : An array containing the linear indices of the cells along the % shortest route from start to dest or an empty array if there is no % route. This is a single dimensional vector % numExpanded: Remember to also return the total number of nodes % expanded during your search. Do not count the goal node as an expanded node. % set up color map for display % 1 - white - clear cell % 2 - black - obstacle % 3 - red = visited % 4 - blue - on list % 5 - green - start % 6 - yellow - destination cmap = [1 1 1; ... 0 0 0; ... 1 0 0; ... 0 0 1; ... 0 1 0; ... 1 1 0; ... 0.5 0.5 0.5]; colormap(cmap); % variable to control if the map is being visualized on every % iteration drawMapEveryTime = true; [nrows, ncols] = size(input_map); % map - a table that keeps track of the state of each grid cell map = zeros(nrows,ncols); map(~input_map) = 1; % Mark free cells map(input_map) = 2; % Mark obstacle cells % Generate linear indices of start and dest nodes start_node = sub2ind(size(map), start_coords(1), start_coords(2)); dest_node = sub2ind(size(map), dest_coords(1), dest_coords(2)); map(start_node) = 5; map(dest_node) = 6; % Initialize distance array distanceFromStart = Inf(nrows,ncols); % For each grid cell this array holds the index of its parent parent = zeros(nrows,ncols); distanceFromStart(start_node) = 0; % keep track of number of nodes expanded numExpanded = 0; % Main Loop while true % Draw current map map(start_node) = 5; map(dest_node) = 6; % make drawMapEveryTime = true if you want to see how the % nodes are expanded on the grid. if (drawMapEveryTime) image(1.5, 1.5, map); grid on; axis image; drawnow; end % Find the node with the minimum distance [min_dist, current] = min(distanceFromStart(:)); if ((current == dest_node) || isinf(min_dist)) break; end; % Update map map(current) = 3; % mark current node as visited numExpanded=numExpanded+1; % Compute row, column coordinates of current node [i, j] = ind2sub(size(distanceFromStart), current); % ********************************************************************* % YOUR CODE BETWEEN THESE LINES OF STARS % Visit each neighbor of the current node and update the map, distances % and parent tables appropriately. action=[-1 0; 1 0; 0 -1; 0 1];%上,下,左,右 for a=1:4 expand=[i,j]+action(a,:); expand1=expand(1,1); expand2=expand(1,2); %不超出边界,不穿越障碍,不在CLOSED列表里,则进行扩展 if ( expand1>=1 && expand1<=nrows && expand2>=1 && expand2<=ncols && map(expand1,expand2)~=2 && map(expand1,expand2)~=3 && map(expand1,expand2)~=5 ) % if ( expand1>=1 && expand1<=nrows && expand2>=1 && expand2<=ncols && map(expand1,expand2)~=2 && map(expand1,expand2)~=3 && map(expand1,expand2)~=5) if ( distanceFromStart(expand1,expand2)> distanceFromStart(i,j)+1 ) distanceFromStart(expand1,expand2)= distanceFromStart(i,j)+1; parent(expand1,expand2)=current; map(expand1,expand2)=4; end end end distanceFromStart(current) = Inf; % remove this node from further consideration %********************************************************************* end %% Construct route from start to dest by following the parent links if (isinf(distanceFromStart(dest_node))) route = []; else route = [dest_node]; while (parent(route(1)) ~= 0) route = [parent(route(1)), route]; end % Snippet of code used to visualize the map and the path for k = 2:length(route) - 1 map(route(k)) = 7; pause(0.1); image(1.5, 1.5, map); grid on; axis image; end end end
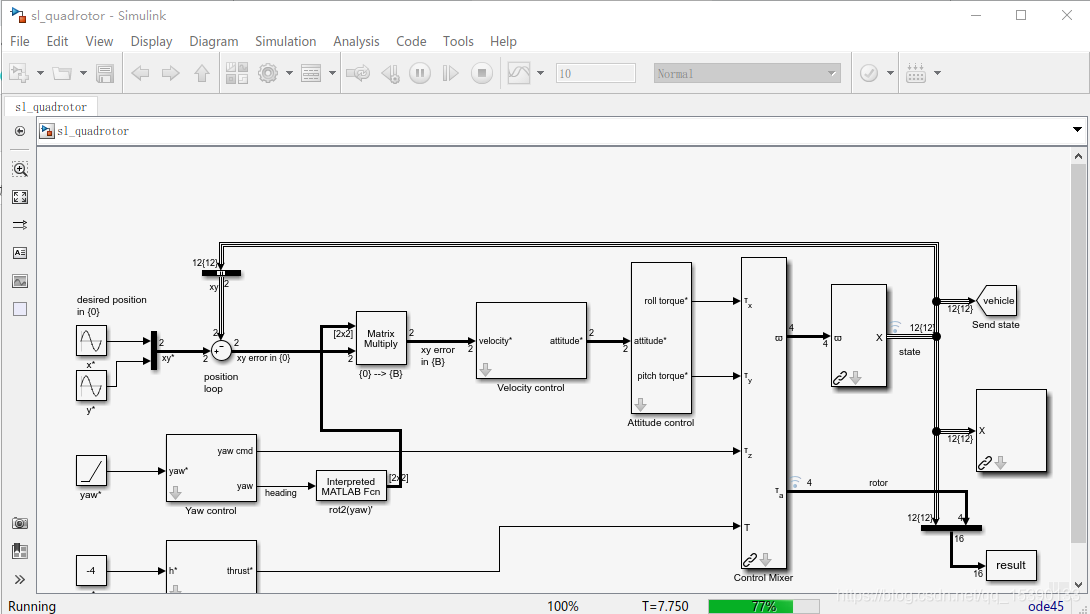
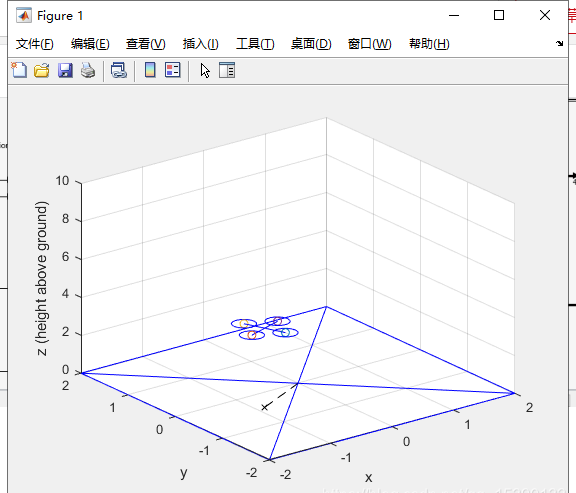
注:运行环境,Matlab 2019a 版本,安装 RTB(Robotic Tool Box) 工具包,链接地址为,RTB安装链接 。
该工具包中可以运行作者大佬写到的matlab/simulink四轴历程,只需要使用指令 sl_quadrotor 即可。
使用方法
在Matlab 中,使用 makemap(30) 来生成地图,通过鼠标来设置障碍形状。该例子生成了一个30*30的方阵,然后直接运行TestScript.m即可。
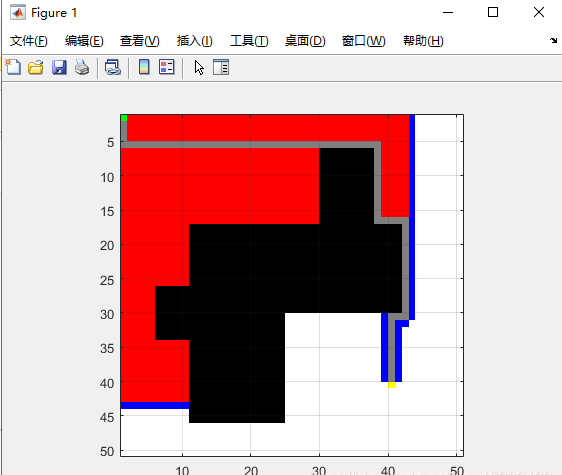
其中要在TestScript.m中选择是采用A算法,还是Dijkstra算法。同时设置起始点和终点在哪。下图显示得到的A算法路径优化结果。
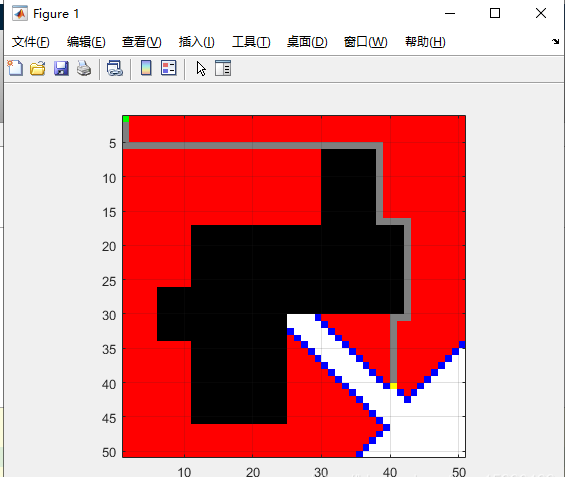
其中绿色点为起点,黄色点为终点,黑色表示障碍,白色表示空闲,红色表示搜寻过,灰色表示最后规划的路径。
下图显示Dijkstra算法的路径优化结果:
对应的动态效果已经录屏,下面给出传送门(录屏水印广告请忽略):
通过对比可以看出:A* 算法搜索速度较快,毕竟里面有贪心算法。
这在地图较大的场景应用较好。但是A*算法只能得到局部最优解,并不能保证全局最优解。
相比之下,Dijkstra算法尽管搜索速度慢,但是是全局最优解。不知道两种方法结合gmapping,hector或者cartographer生成的栅格地图会是什么样的效果。后面期待尝试一下。
审核编辑:汤梓红
-
中国铁路网的Dijkstra算法实现案例2024-04-09 2090
-
路径规划算法实现原理2023-09-06 2062
-
Dijkstra算法和A*算法2023-07-07 3313
-
基于STM32的A*(A星)寻路算法实现2021-12-27 1324
-
系统仿真及其Matlab实现2021-06-17 1101
-
遗传算法原理及其MATLAB实现的详细资料说明2019-12-18 1310
-
使用dijkstra算法的准备工作2019-05-23 1604
-
《图论算法及其MATLAB实现》电子教材和函数及函数功能列表概述2018-10-22 932
-
基于Dijkstra最短路径的抽样算法2017-12-17 1116
-
BP算法及其matlab实现2017-12-02 593
-
基于有向非负极图数据DIJKSTRA算法2017-11-03 970
-
模糊推理的Mamdani算法及其Matlab实现2015-11-17 1565
-
SOFM网络及其在MATLAB中的实现2009-09-18 906
-
数字信号处理及其MATLAB实现2006-03-25 1018
全部0条评论

快来发表一下你的评论吧 !
