

机器人传感器:本体感知传感器和外部感知传感器
机器人
描述
机器人本质上是一种具有自主运作能力的机器。为了实现自主性,需要一整套传感器来满足不同任务的要求,例如自主导航、物体检测、接近感测等。随着传感器技术越来越成熟,过去几年来,各类传感器的成本逐渐降低,推动了其在机器人领域的更广泛应用。机器人作为高度集成的机器,需要应用很多传感器,包括从光学编码器、电流传感器到惯性传感器、摄像头以及激光雷达(LiDAR)等。
根据感知的数据,机器人传感器主要可以分为两大类:本体感知传感器和外部感知传感器。本体感知传感器收集机器人本体速度、扭矩和位置等内部数据。这些传感器通常用于机器人的控制。相反,外部感知传感器主要收集外部环境数据,感知环境参数,例如障碍物的位置、施加在机器人上的外力以及许多其他输入。
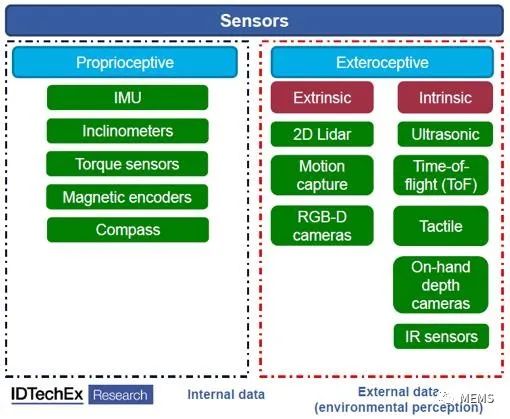
机器人传感器分类
触觉传感器、摄像头、激光雷达、雷达、超声波传感器等是外部感知传感器的几个典型示例。随着各类机器人的日益普及,以及市场对“智能”机器人需求的不断提高,英国知名研究公司IDTechEx预测机器人传感器市场将在未来20年内高速增长。
据麦姆斯咨询介绍,IDTechEx在这份最新报告中深入探讨了9种常见的传感器类型、9种机器人和29种应用,深入分析了关键赋能技术、厂商和市场,并对未来20年的市场规模和销售趋势进行了精准预测。
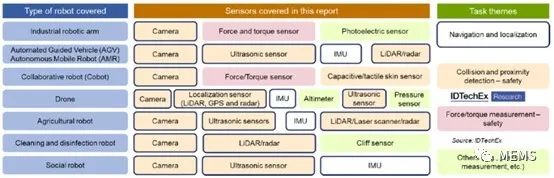
本报告研究覆盖的机器人类型、传感器及其任务
导航和地图测绘传感器
得益于自动驾驶技术的发展,机器人自主运行在过去十年中获得了巨大的发展。作为机器人自主性最重要的体现之一,自主运行使机器人能够在最少的人工干预下独立移动,并完成物流配送、农业应用、测绘和探索等许多任务。
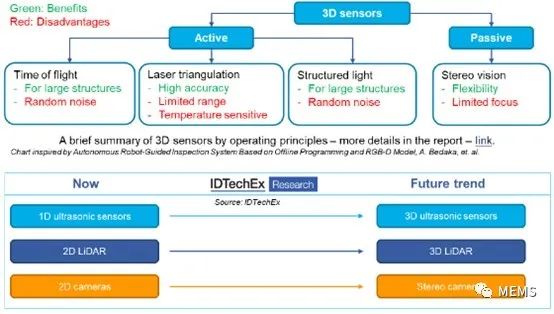
机器人3D传感器应用
自主运行需要包括两个步骤:地图测绘和导航。最初,机器人需要能够测绘周围环境的地图,构建由点云组成的环境模型,并规划移动轨迹/路径,然后遵循规划的轨迹利用导航传感器定位运行。这两个步骤都需要物体检测、导航和从周围环境收集数据的传感器。在实践中,根据不同的工作环境,各类导航和地图测绘传感器通常需要一起使用,并利用传感器融合算法处理来自不同传感器的数据。
典型的导航和地图测绘传感器包括激光雷达、雷达、摄像头、GPS/GNSS和超声波传感器(包括1D和3D)等。下表比较了其中一些传感器的优缺点,IDTechEx在报告中提供了更深入的技术分析。
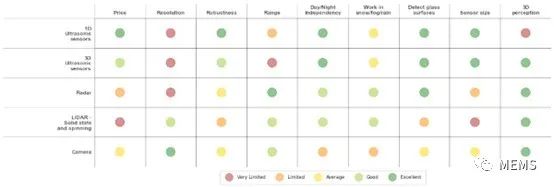
典型导航和地图测绘传感器对比分析
碰撞/接近传感器
除了自主运行,安全始终是所有机器人的首要任务,尤其是随着人机交互(HRI)的提高以及任务的越来越复杂。IDTechEx预计,相关法规将越来越严格,以确保人机交互的安全水平。为了使机器人符合安全要求,机器人需要能够精确感知与人类操作员之间的相对距离和碰撞可能。当人类操作员/物体接近时,机器人需要减速或停止。为此,机器人通常需要利用碰撞/接近传感器。
随着传感器技术的进步,碰撞检测和接近检测之间的界限已经模糊。碰撞检测和接近检测之间的根本区别是物体和传感器/机器人之间的距离。从技术角度来看,碰撞/接近传感器通常基于光反射法、飞行时间法、三角测量法、电容检测法和超声波测距法这五种检测原理中的一种或多种。
下图比较了几种商用传感器的检测原理,概述了每种检测方法的响应时间和最大检测范围。总体趋势来看,机器人终端用户希望传感器具有响应速度快、探测范围大、占位面积小等特点。然而,对于不同的应用,某些特性可能会有所取舍。例如,用于物流或物料处理的室内自主运行机器人,可能就不需要像室外移动机器人那样大的探测范围。
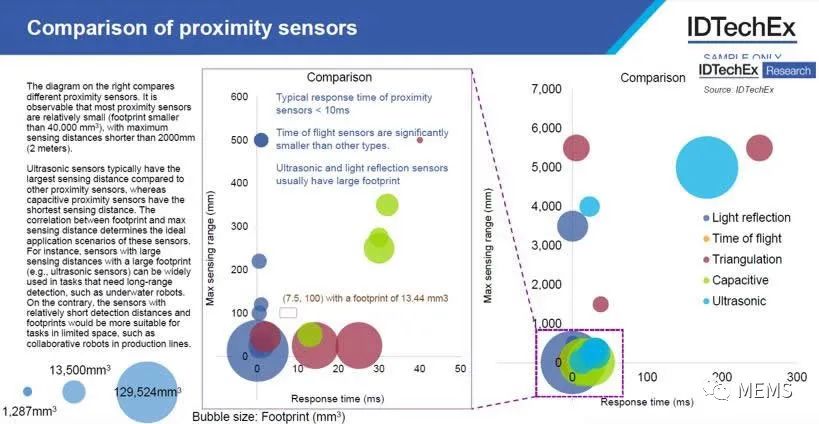
接近检测技术对比分析
总结
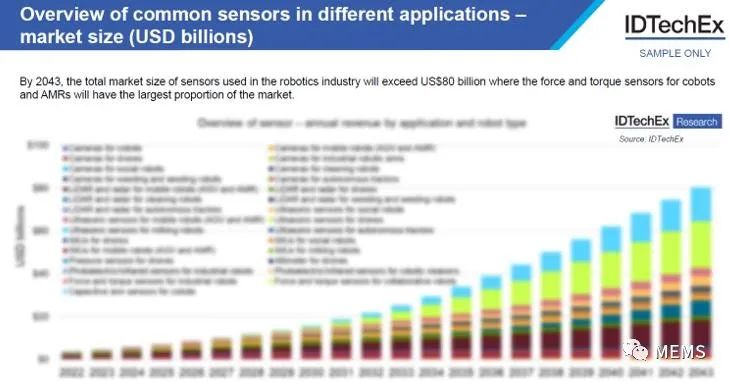
IDTechEx深入分析了29种机器人应用中的传感器,表明机器人传感器市场将迎来高速增长。鉴于机器人和自主运行机械的巨大市场规模,IDTechEx预计机器人传感器市场规模将在未来20年增长20倍,到2043年增长至800亿美元以上。每类机器人及其传感器都有各自的需求和市场驱动。巨大的市场规模和高速增长代表着大量机遇,本报告对此进行了详细分析。
按应用细分的机器人传感器市场预测(样刊模糊化)
编辑:黄飞
-
机器人竞技幕后:磁传感器芯片激活 “精准感知力”2025-08-26 931
-
为什么说关节扭矩传感器是高端机器人的“触觉神经”?2026-04-17 907
-
智能机器人对于传感器的需求2015-01-20 6808
-
机器人传感器2018-01-03 3823
-
机器人也能感知?一篇文章告诉你传感器的秘密2018-05-11 9443
-
面向频谱感知的传感器网络设计2018-11-06 1907
-
机器人传感器的类别和应用原理2018-11-08 2986
-
传感器将成为机器人无可替代的依赖之一2018-11-28 3771
-
基于ARM9的DF-1机器人传感器系统设计2019-06-21 2477
-
距离传感器有什么用2019-08-21 3305
-
机器人传感器应用2021-09-16 1876
-
机器人内置传感器如何保证精度2017-09-29 962
-
智能机器人视觉传感器的技术和应用2019-06-11 14470
-
传感器对机器人的重要性2020-02-03 7517
-
机器人会用到哪些传感器2024-01-03 5044
全部0条评论

快来发表一下你的评论吧 !
