

Google TPU架构演进及十大经验
描述
David Patterson,Google杰出工程师、UC Berkeley荣誉退休教授、美国国家工程院、科学院院士、文理科学院“三院”院士。他是RISC(精简指令集计算机)、RAID(独立磁盘冗余阵列)和NOW(工作站网络)的缔造者,他与John Hennessy的著作《计算机体系结构:量化研究方法》在业内久负盛名。
2017年,David Patterson加入Google TPU团队,2018年3月,他与John Hennessy共同获得图灵奖,2008年获ACM/IEEE Eckert-Mauchly 奖(被誉为计算机体系结构最高奖),2000年获得冯·诺依曼奖章。
本文是他近期在加州大学伯克利分校的演讲,他分享了Google TPU近十年的发展历程以及心得体会,并阐述了提升机器学习硬件能效对碳足迹的影响。OneFlow社区对此进行了编译。
01一场由TPU引发的“地震”
2013年,Google AI负责人Jeff Dean经过计算后发现,如果有1亿安卓用户每天使用手机语音转文字服务3分钟,消耗的算力就已是Google所有数据中心总算力的两倍,何况全球安卓用户远不止1亿。
如果仅通过扩大数据中心规模来满足算力需求,不但耗时,而且成本高昂。因此,Google决定针对机器学习构建特定领域计算架构(Domain-specific Architecture),希望将深度神经网络推理的总体拥有成本(TCO)降低至原来的十分之一。
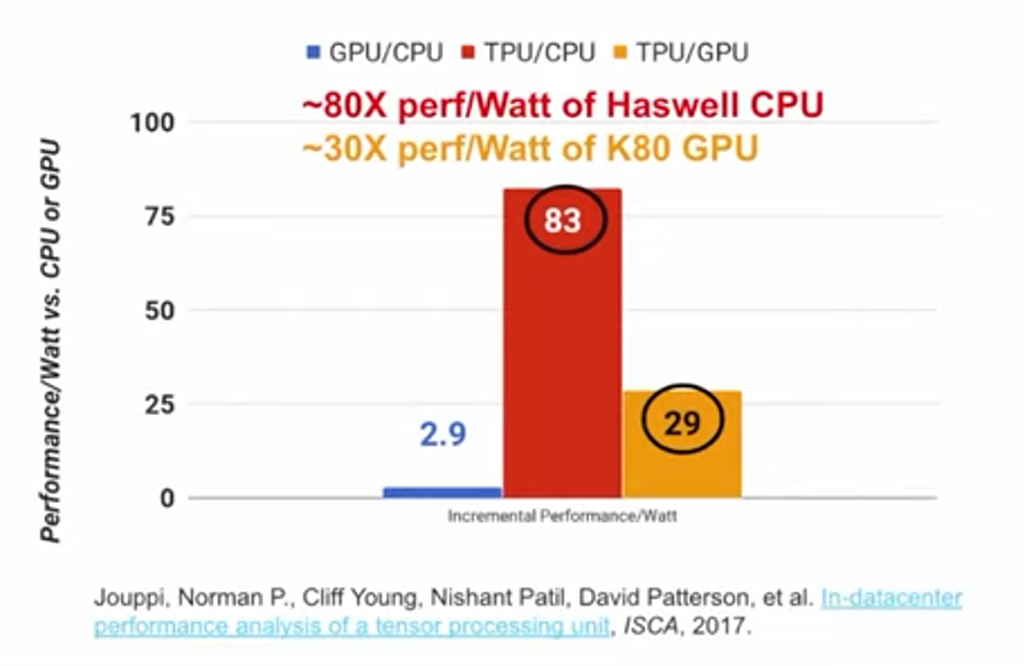
于是,Google在2014年开始研发TPU,项目进展神速,仅15个月后TPU就可在Google数据中心部署应用,而且TPU的性能远超预期,它的每瓦性能是是GPU的30倍、CPU的80倍。(数据源自论文: https://arxiv.org/ftp/arxiv/papers/1704/1704.04760.pdf)
2016年,在Google I/O开发者大会上,Google首席执行官Sundar Pichai对外公布了TPU这一突破性成果,他介绍道:
“通过Google云平台,用户不但可以接触到Google内部使用的高性能软件,还可以使用Google内部开发的专用硬件。机器学习的计算规模巨大,因此Google研发了机器学习专用硬件,也就是‘张量处理单元(TPU)’。TPU的每瓦性能比市面上所有GPU和FPGA都高出一个数量级。用户可以通过Google云平台体验TPU的优异性能。DeepMind研发的AlphaGo在与韩国棋手李世石的对战中使用的底层硬件就是TPU。”

希腊神话中,特洛伊战争的起因是两方争夺世界上最美的女人——海伦,后世诗人将海伦的美貌“令成千战舰为之起航”。我认为TPU就像海伦,它的出现引起了“成千芯片与之竞逐”。
可以说,TPU的问世引发了硅谷的“地震”。TPU宣布诞生后,Intel耗资数十亿美元收购了多家芯片公司,阿里巴巴、Amazon等竞争对手纷纷开始研发类似产品。TPU重新唤起了人们对计算机架构的关注,后来的几年内,出现了上百家相关初创企业,年均总融资额近20亿美元,各种新奇的想法层出不穷。
五年后,Sundar Pichai又在2021年Google I/O开发者大会公布TPU v4:
“AI技术的进步有赖于计算基础设施的支持,而TPU正是Google计算基础设施的重要部分。新一代TPU v4芯片的速度是v3的两倍多。Google用TPU集群构建出Pod超级计算机,单台TPU v4 Pod包含4096块v4芯片,每台Pod的芯片间互连带宽是其他互连技术的10倍,因此,TPU v4 Pod的算力可达1 ExaFLOP,即每秒执行10的18次方浮点运算,相当于1000万台笔记本电脑的总算力。”
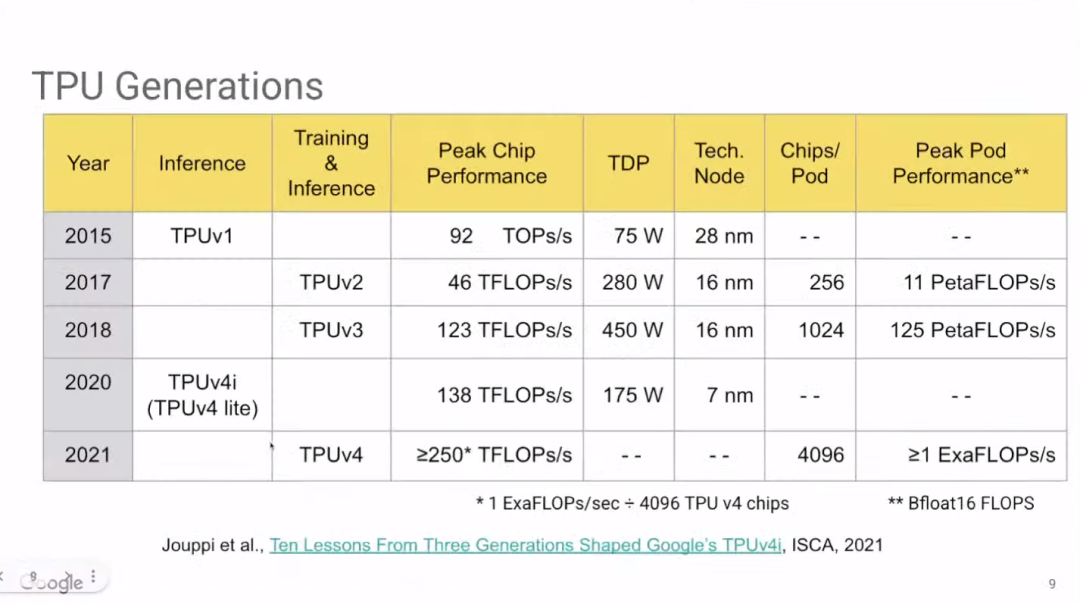
上图展示了TPU的发展历史。其中,Google尚未公布TPU v4i(TPU v4 lite)的相关细节。去年Google宣布TPU v4i已在云服务上可用,也发表了一篇关于TPU v4i的论文。
(https://www.gwern.net/docs/ai/scaling/hardware/2021-jouppi.pdf)
02 十年演进,十大教训
过往十年,我们在ML计算架构的发展中汲取了十大教训。
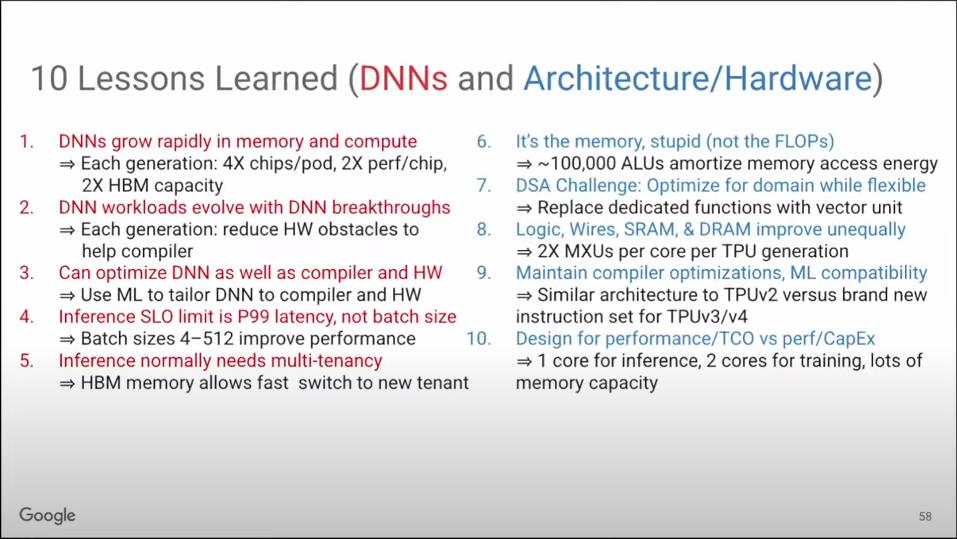
其中,前五个都和ML模型本身有关,后五个则关乎硬件和架构。这些经验对深度学习以外的领域也有借鉴意义。
教训一:DNN所需内存空间和算力迅速增长
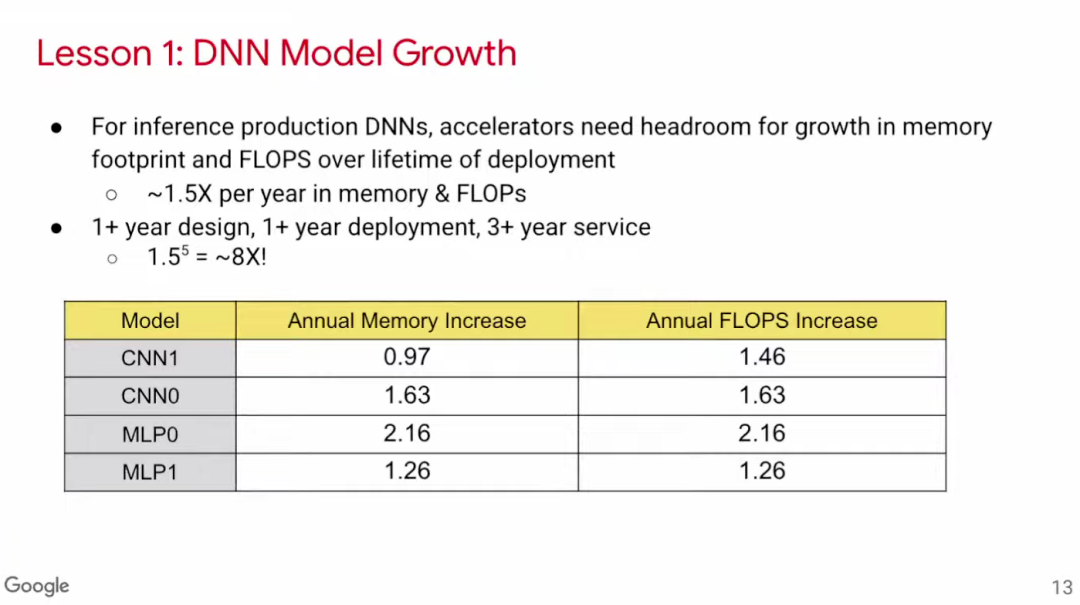
我们阅读近几年的论文后发现,推理模型所需的内存空间和算力平均每年增长50%。由于芯片设计和部署至少各需要1年,投入实际使用并优化需要3年。可见,从一款芯片开始设计到生产周期结束的5年内,模型所需的内存空间和算力已增长到大约8倍。因此,在芯片设计之初就要将这种增长考虑在内。
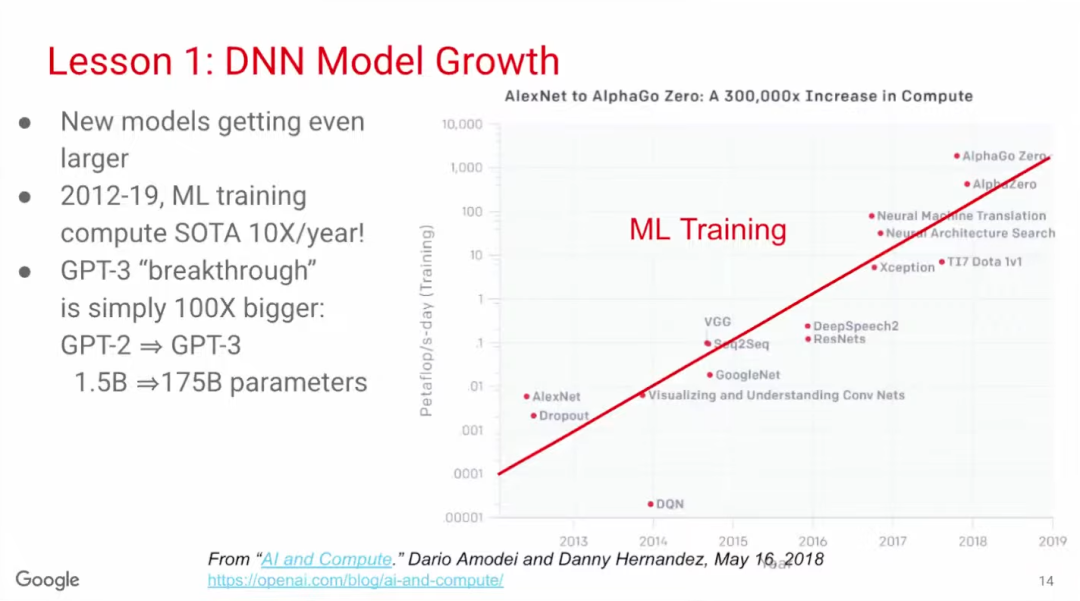
训练模型的长速度比推理模型更快。根据OpenAI的统计,2012-2019年,SOTA训练模型的算力需求年均增长10倍。备受关注的GPT-3模型的参数量更是从15亿(GPT-2)增长到1750亿,提高了100倍。
教训二:DNN工作负载随着DNN突破不断演变
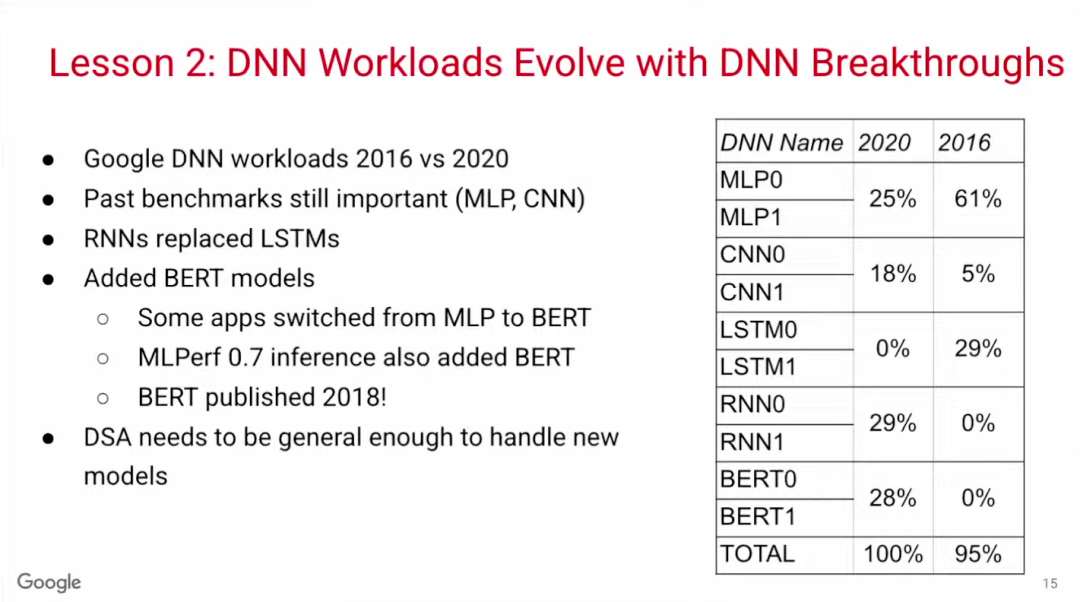
深度学习是一个日新月异的领域。2016年,MLP(多层感知器)模型仍是主流,但到2020年,CNN、RNN和BERT等不同模型百花齐放。BERT是一种全新的Transformer模型,诞生于2018年,短短两年后,四分之一以上的Google内部应用都在使用BERT模型,可见深度学习发展变化之快。因此,ML计算架构需要能够支持多种模型。
教训三:DNN模型可优化
通常而言,计算机架构师只需懂硬件、体系结构、编译器,如果还懂操作系统则更好,但他们不需要懂应用。然而,构建针对特定领域的架构则需要软硬件兼通。
对ML工程师而言,只要可以让模型跑得更好,他们非常愿意根据硬件/编译器改进DNN模型。毕竟DNN模型不像GCC编译器,后者已成为被广泛采纳的编译器标准,不会轻易根据硬件改动。
DNN模型之所以可以优化,部分原因是这些程序本身不算庞大,大约只是成千上万行PyTorch或TensorFlow代码,操作可行性较强。
Google的一篇论文介绍了一种模型优化技术Platform-aware AutoML,AutoML使用的方法称为“神经架构搜索(Neural Architecture Search)”,即机器自动在搜索空间中寻找更优的神经网络模型结构。在上述论文的例子中,经机器自动优化后的CNN1模型,在相同的硬件和编译器上可实现相同的准确率,而运算性能为原模型的1.6倍。
教训四:影响推理体验的是延迟,而非批次规模
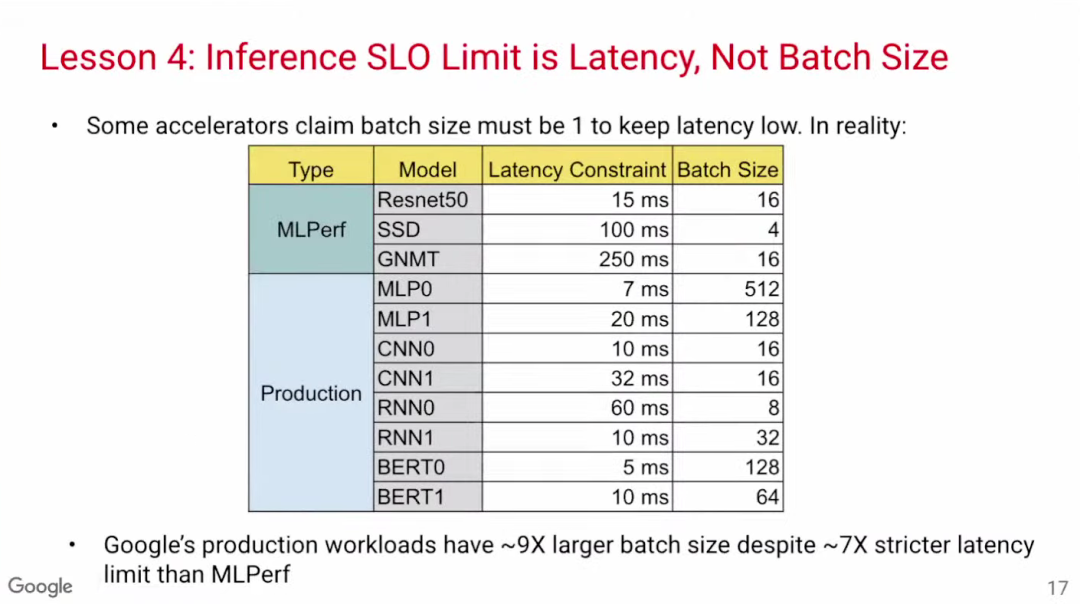
一些关于模型推理优化的论文把重点放在数据批次规模(batch size)上,认为要把batch size设置为1才能使延迟降到最低。然而,通过MLPerf基准数据可见,Google的生产模型在batch size相当大的情况下也能实现低延迟,这可能是因为这些模型是基于TPU开发,因此更加高效。
教训五:生产端推理需要多租户技术
DNN需要使用多租户技术(multi-tenancy)。不少深度学习论文的一个假设是同一时间只需运行一个模型,但在实际应用中,有不少情况都需要在不同模型中切换。
比如,机器翻译涉及各种语言对,就需要不同的模型;传统的软件开发需要用到一个主模型和多个实验模型;甚至有时因为对吞吐量和延迟有不同的侧重要求,就需要不同的batch size,进而需要不同的模型。
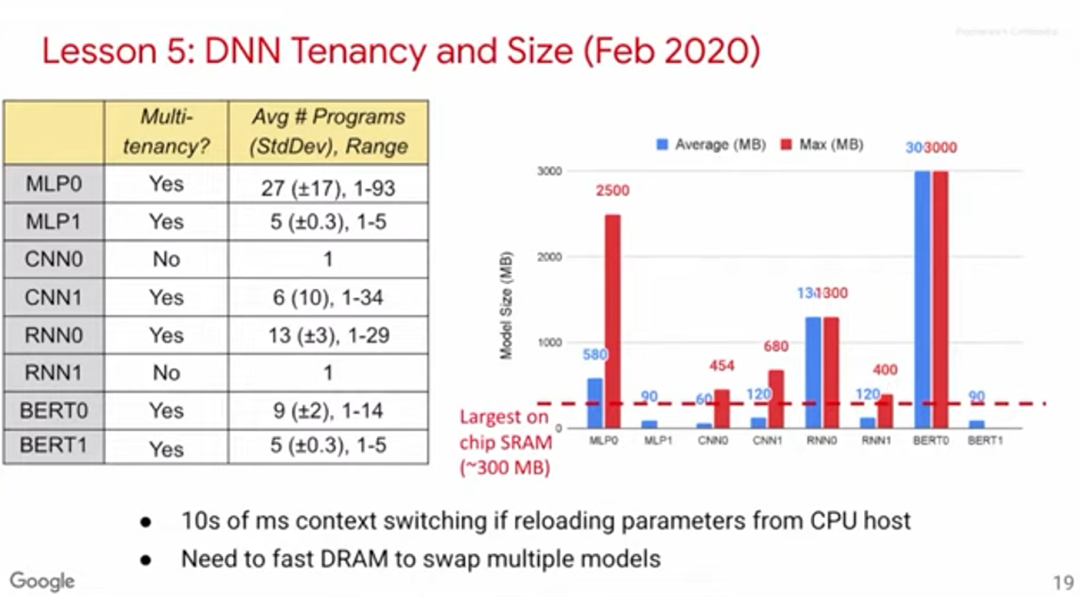
如上图所示,我们收集了8个模型的基准数据,其中6个模型涉及多租户。右方的柱状图展示了模型大小(以MB计算)。红色虚线表示单块芯片的最大SRAM,可见不少模型需要的内存远大于此,这意味着需要有存取速度极快的DRAM。部分芯片的设计思路是利用SRAM解决所有任务,但在多租户应用场景下,我们认为这很难办到。
教训六:重要的是内存,而非浮点运算数
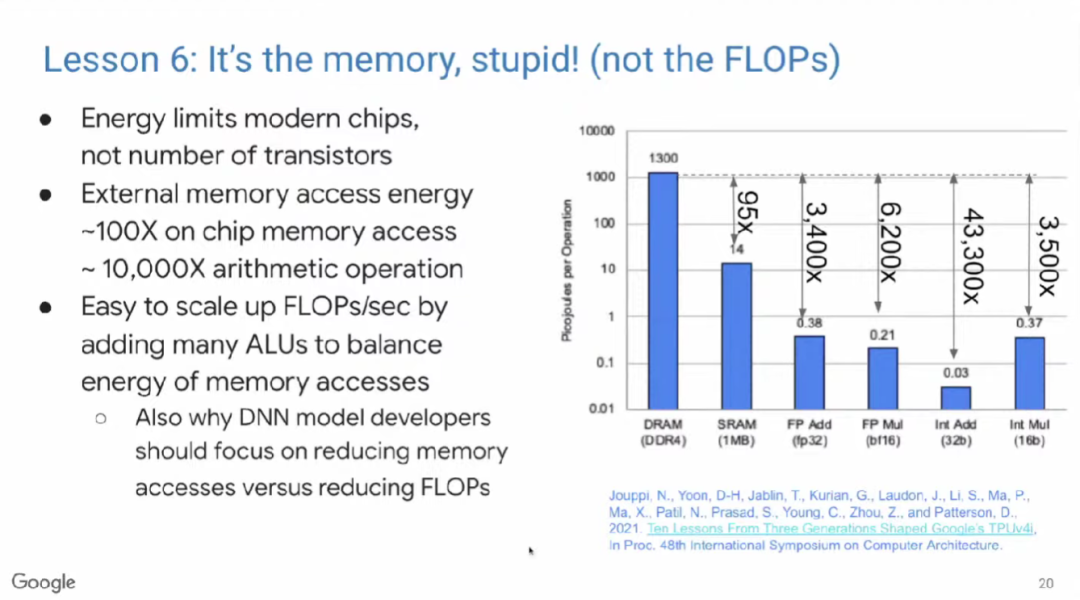
借用克林顿竞选总统时的口号——“重要的是经济,懂吗?”(OneFlow译注:当时美国正值经济萧条,克林顿将经济作为竞选演说的重要话题,最终赢得选举),在此,我想说,“重要的是内存,不是浮点运算数(FLOPs),懂吗?”
现代微处理器最大的瓶颈是能耗,而不是芯片集成度。Yahoo!创始人Mark Horowitz在十多年前就发现,访问片外DRAM的能耗是访问片上DRAM的100倍,是算术运算的5000~10,000倍。因此,我们希望可以通过增加浮点运算单元(FPU)来分摊内存访问开销。基于Mark Horowitz的数据,芯片上的FPU数量被设置为10,000个左右。ML模型开发人员常常试图通过减少浮点运算数来优化模型,但其实减少内存访问数才是更有效的办法。
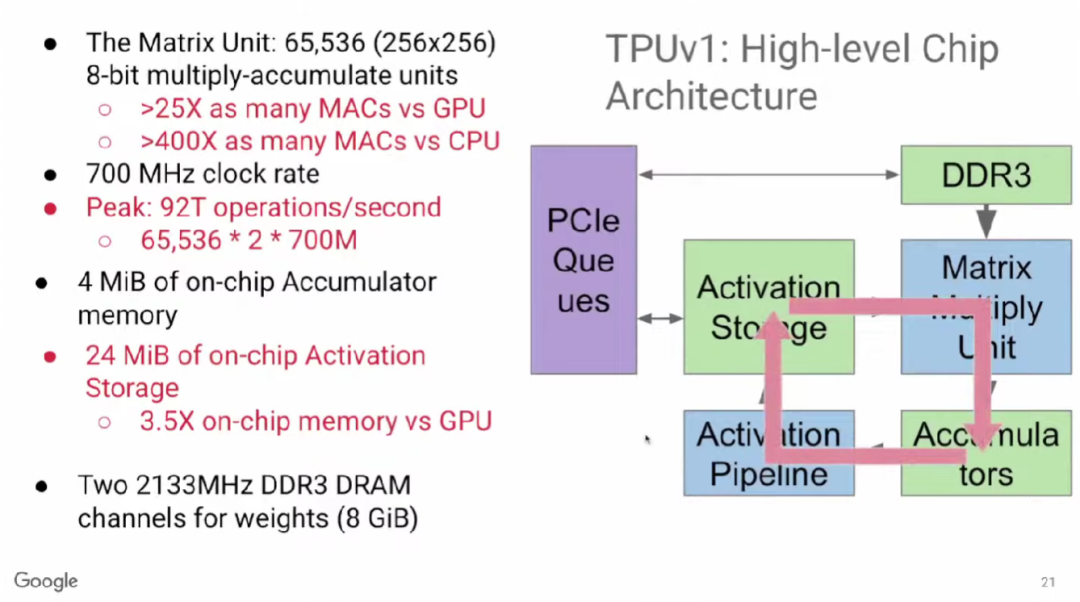
TPU v1有65,000多个乘法单元,比GPU、CPU等硬件高出许多倍。尽管它的时钟频率较低,仅为700MHz,但由于其乘法单元数量巨大,且每个乘法单元可进行2个运算操作,因此TPU v1每秒可执行65,000×2×700M≈90 TeraOPS次操作。
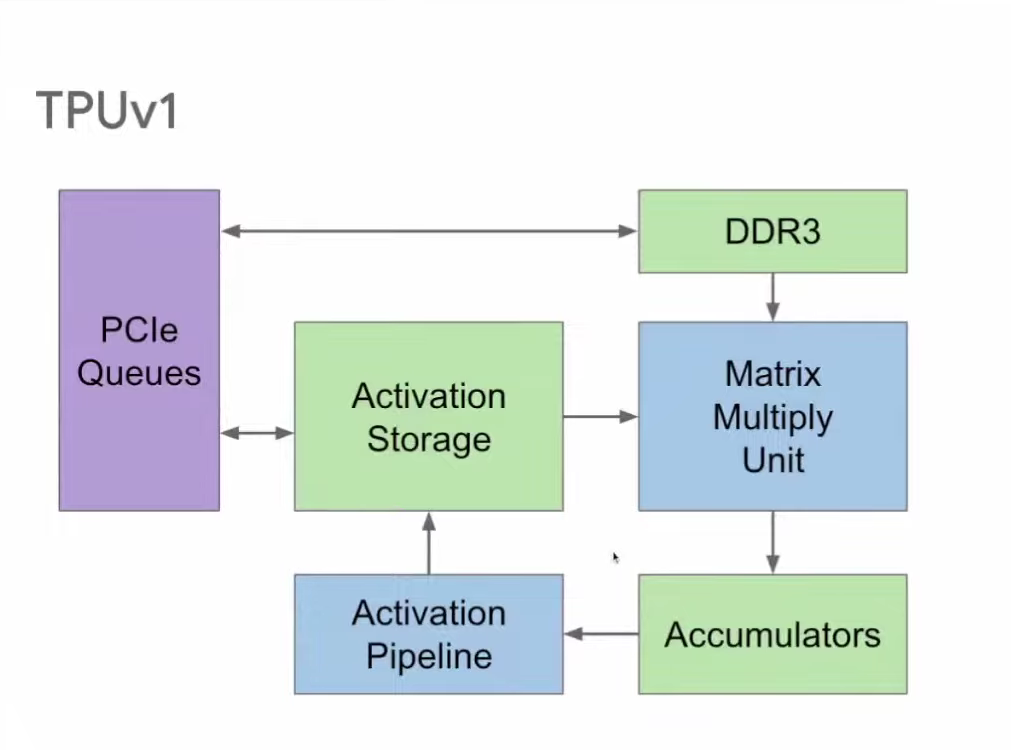
上图右侧展示了运算时的主要工作循环。65,000多个乘法器组成矩阵乘法单元(Matrix Multiply Unit)。计算时,首先启动累加器(Accumulator),然后通过激活函数管道(Activation Pipeline)进行非线性函数运算。累加器和激活函数输出存储(Activation Storage)是两个主要功能单元之间的缓冲区。内存(DDR3)向矩阵乘法单元输入参数;最后,计算结果通过PCIe队列返回服务器。
因此,TPU v1中主要的数据流动如下图红色箭头所示,此外的数据流动还包括DDR3向其中输入权重,以及计算输出结果发送至主机。
TPU v1使用了脉动阵列(systolic array),这一概念早在40年前就被提出,做法是以固定的时间间隔使数据从不同方向流入阵列中的处理单元(cell),最后将数据累积,以完成大型矩阵乘法运算。由于70年代的芯片只有一个金属层,不能很好地实现互连,所以Kung和Leiserson提出“脉动阵列“以减少布线,简化连接。
现代芯片有多达10个金属层,不存在这方面的问题,其最大难点是能耗,而脉动阵列的能效极高,使用脉动阵列可以使芯片容纳更多乘法单元,从而分摊内存访问开销。
教训七:DSA既要专门优化,也要灵活
作为一种针对特定领域的架构(DSA),TPU的难点在于既要进行针对性的优化,同时还须保持一定的灵活性。Google在推出用于推理的TPU v1之后,决定攻克更难的问题——训练。
训练之所以比推理更加复杂,是因为训练的计算量更大,包含反向传播、转置和求导等运算。而且训练时需要将大量运算结果储存起来用于反向传播的计算,因此也需要更大的内存空间。
TPU v1只支持INT8计算,对训练而言动态范围不够大,因此Google在TPU v2引入了一种的新的浮点格式BFloat16,用于机器学习计算。训练的并行化比推理的并行化更难。由于针对的是训练而非推理,所以TPU v2的可编程性也比TPU v1更高。
与TPU v1相比,TPU v2的改进分为5步。第一步,TPU v1有两个存储区域:Accumulator和Activation Storage,前者负责储存矩阵相乘结果,后者负责储存激活函数输出。
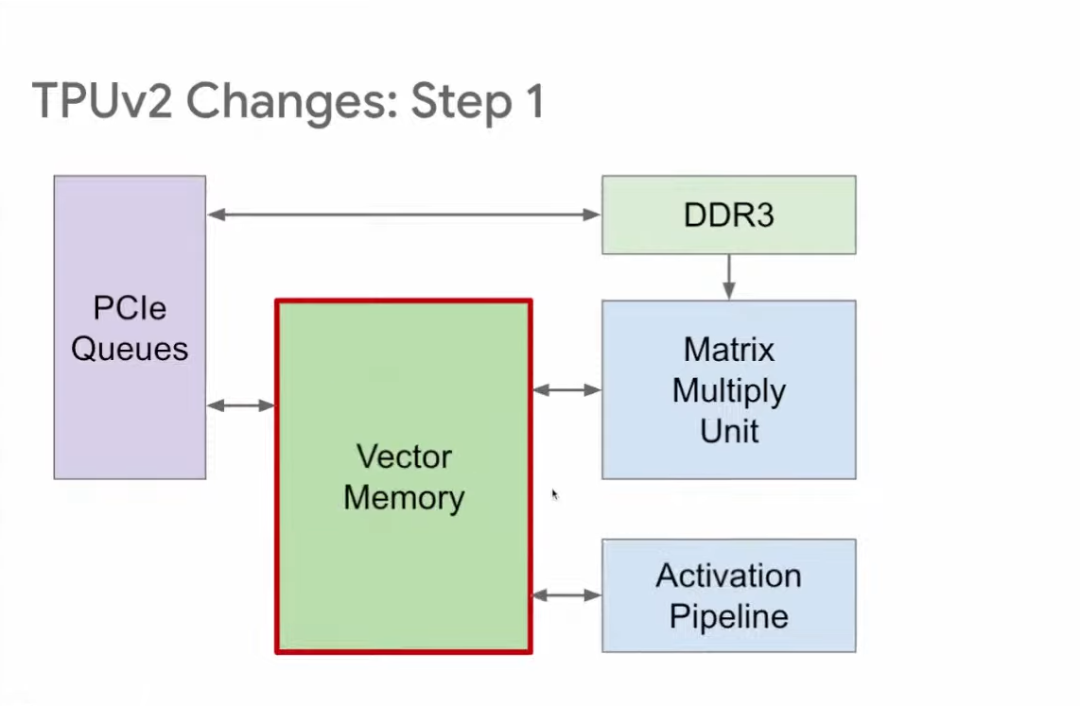
为了提升灵活性,TPU v2将上述两个互相独立的缓冲区调整位置后合并为向量存储区(Vector Memory),从而提高可编程性,这也更类似传统的内存区。
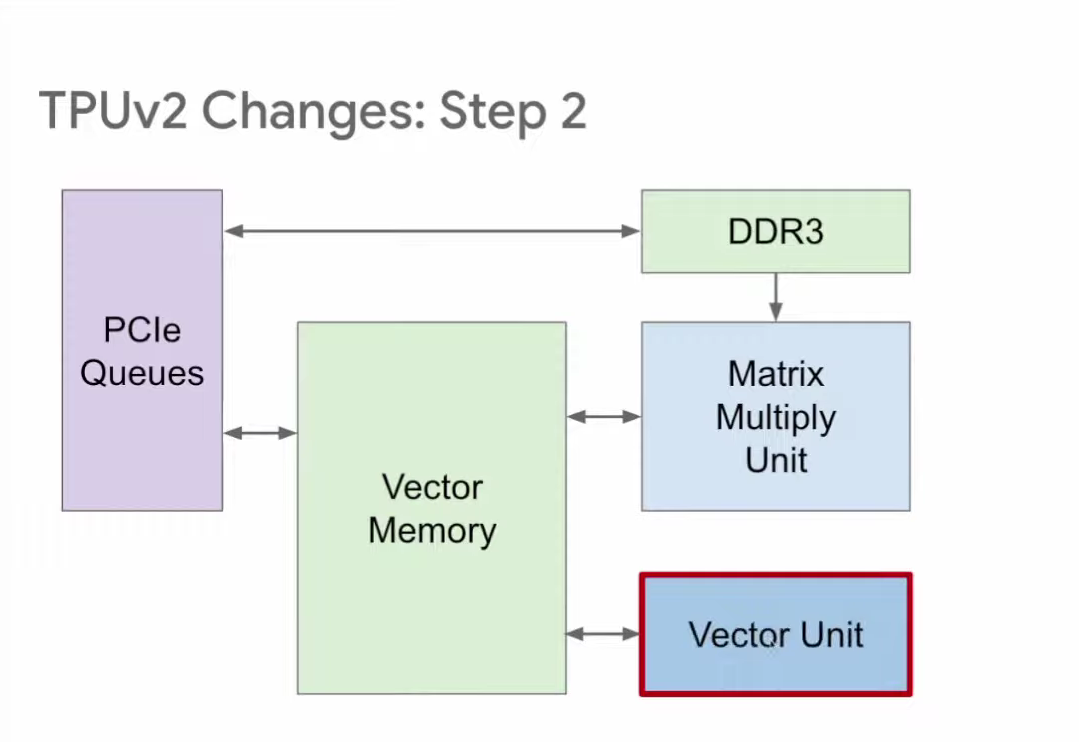
第二步改进针对的是激活函数管道(Activation Pipeline),TPU v1的管道内包含一组负责非线性激活函数运算的固定功能单元。TPU v2则将其改为可编程性更高的向量单元(Vector Unit),使其对编译器和编程人员而言更易用。
第三步,将矩阵乘法单元直接与向量存储区连接,如此一来,矩阵乘法单元就成为向量单元的协处理器。这种结构对编译器和编程人员而言更友好。
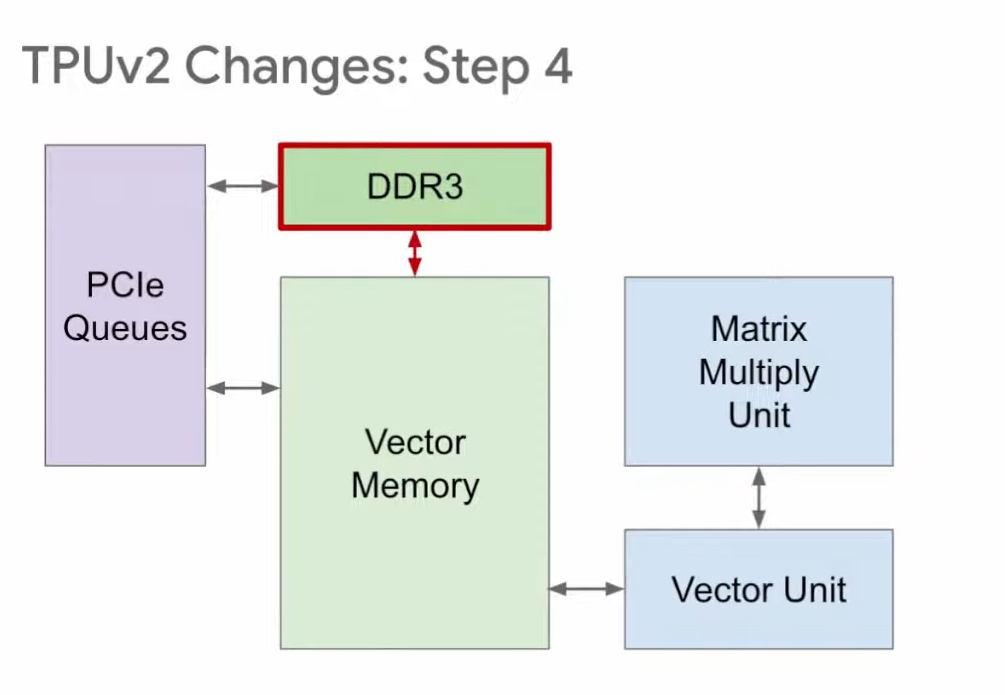
第四步,TPU v1使用DDR3内存,因为它针对的是推理,只需使用已有的权重,不需要生成权重。针对训练的TPU v2则不一样,训练时既要读取权重,也要写入权重,所以在v2中,我们将原本的DDR3改为与向量存储区相连,这样就既能向其读取数据,又能向其写入数据。
然后,我们将DDR3改为HBM。因为从DDR3读取参数速度太慢,影响性能,而HBM的读写速度快20倍。
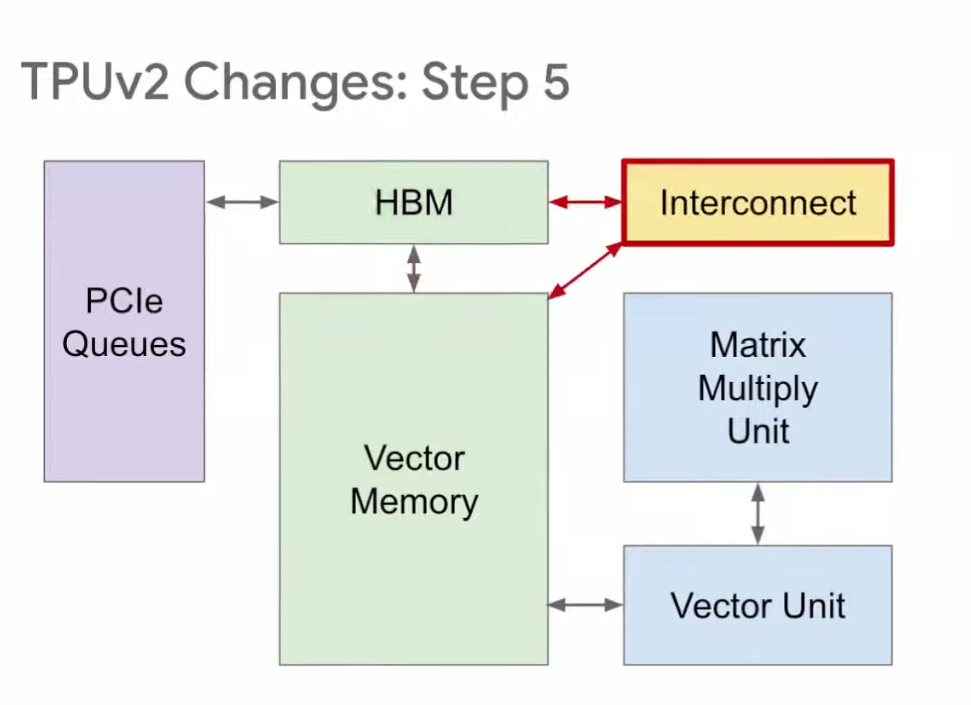
第五步,我们在HBM和向量存储区之间增加互连(Interconnect),用于TPU之间的连接,组成我们之前提到的Pod超级计算机。以上就是从TPU v1到TPU v2的改进。
教训八:半导体技术的发展速度参差不齐
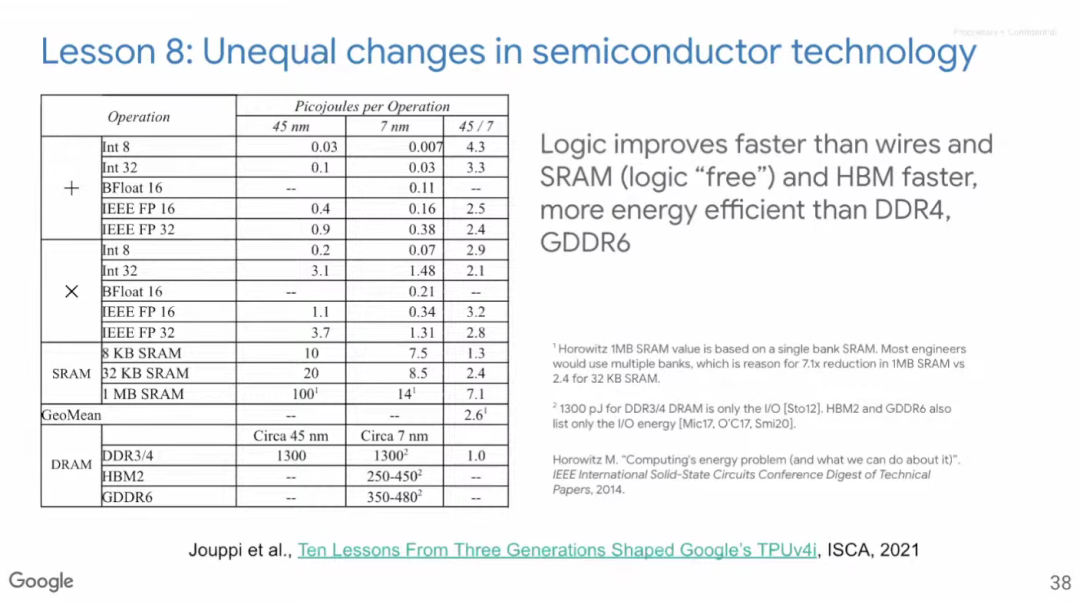
回顾过去可以发现,各类技术的发展速度并不同步。计算逻辑的进步速度很快,芯片布线的发展速度则较慢,而SRAM和HBM比DDR4和GDDR6的速度更快,能效更高。
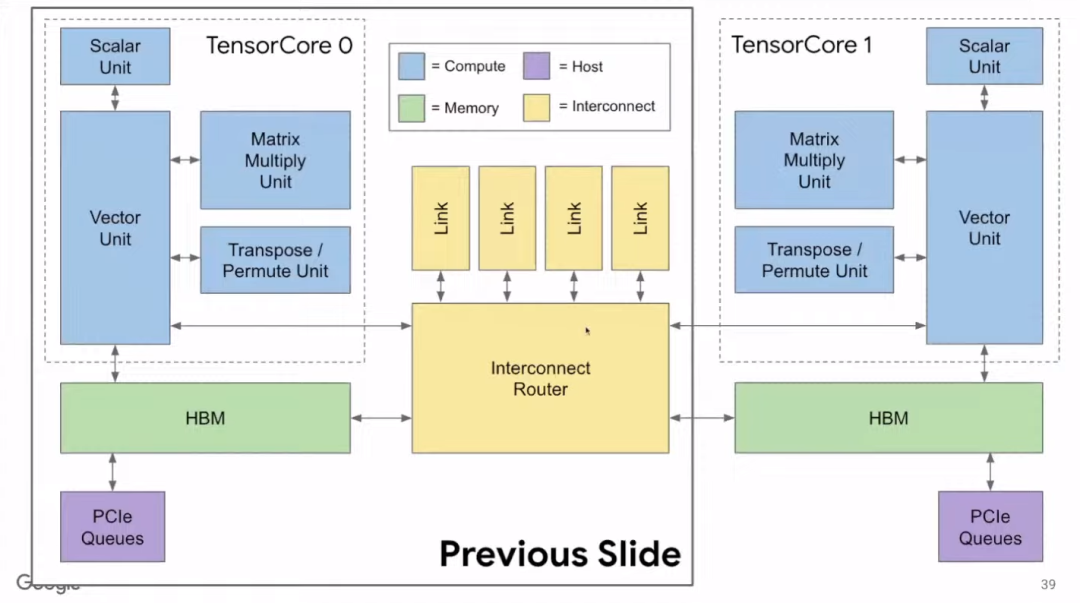
上图虚线框内展示了单个Tensor Core运算单元。TPU v2中有两个互连的Tensor Core。
由于布线技术的进步相对滞后,如果仍像TPU v1一样,每块芯片只有一个Tensor Core,就会导致管道更为冗长,如果管道出了问题也会更加麻烦。因此,我们将两个Tensor Core互相连接,这对编译器而言也更友好。
Google做出TPU v2之后,希望再花一年时间完善v2,所以TPU v3没有引进新技术,只是v2的改进版。
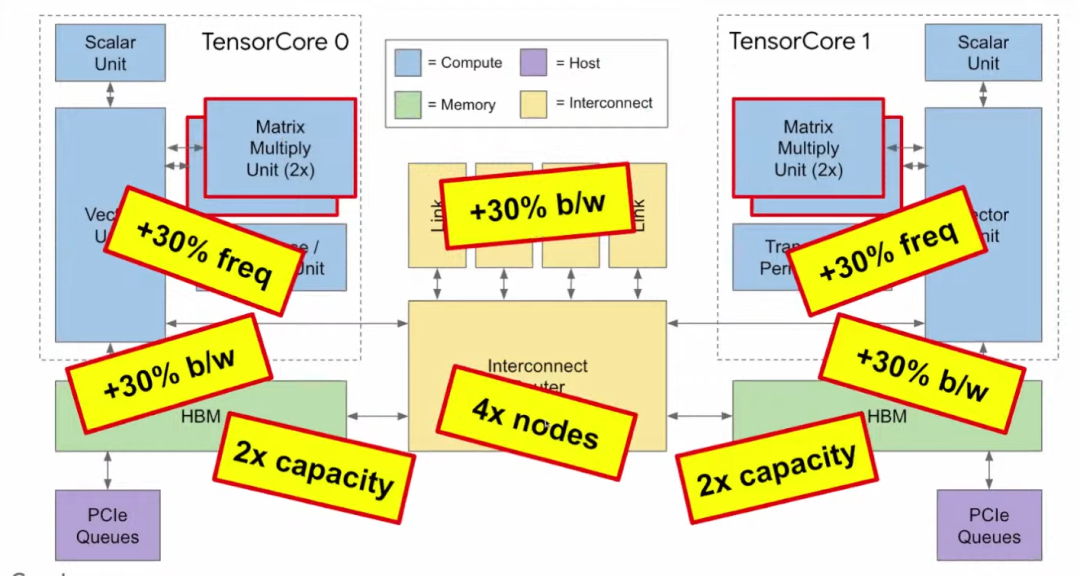
与v2相比,TPU v3有以下特点:
体积只大了不到10%;
矩阵乘法单元(MXU)的数量翻倍,因此峰值性能也翻倍;
时钟频率加快了30%,进一步加快计算速度;
内存带宽扩大了30%;
容量翻倍,可使多种应用更加方便;
芯片间带宽扩大30%;
可连接的节点数是之前的4倍。

上图左上角即为TPU v1的主板。中间是v2,v2的散热方式是风冷,所以图中可见高高突起的风冷散热器。右上角是v3,v3的运行温度太高,所以只能采用液冷。左下角是TPU v2组成的Pod超级计算机,共有256张TPU,峰值性能为11 PFLOP/s;右侧的TPU v3 Pod有1024张TPU,峰值性能可达100 PFLOP/s(1 PFLOP/s即每秒1015次浮点运算)。
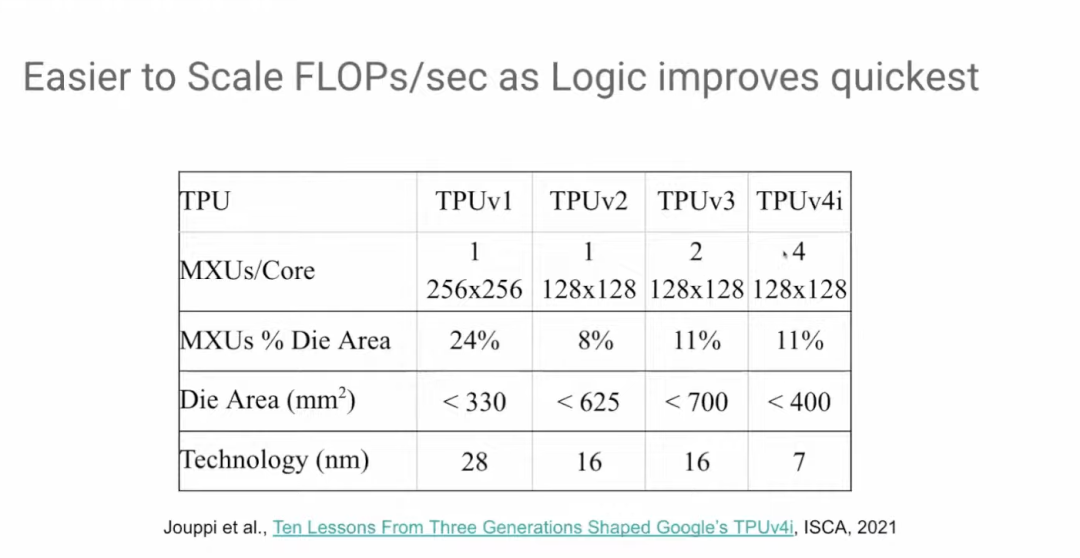
从TPU v3到TPU v4i,矩阵乘法单元的数量再次翻倍,但芯片面积却没有扩大。如前所述,计算逻辑的发展速度是最快的。
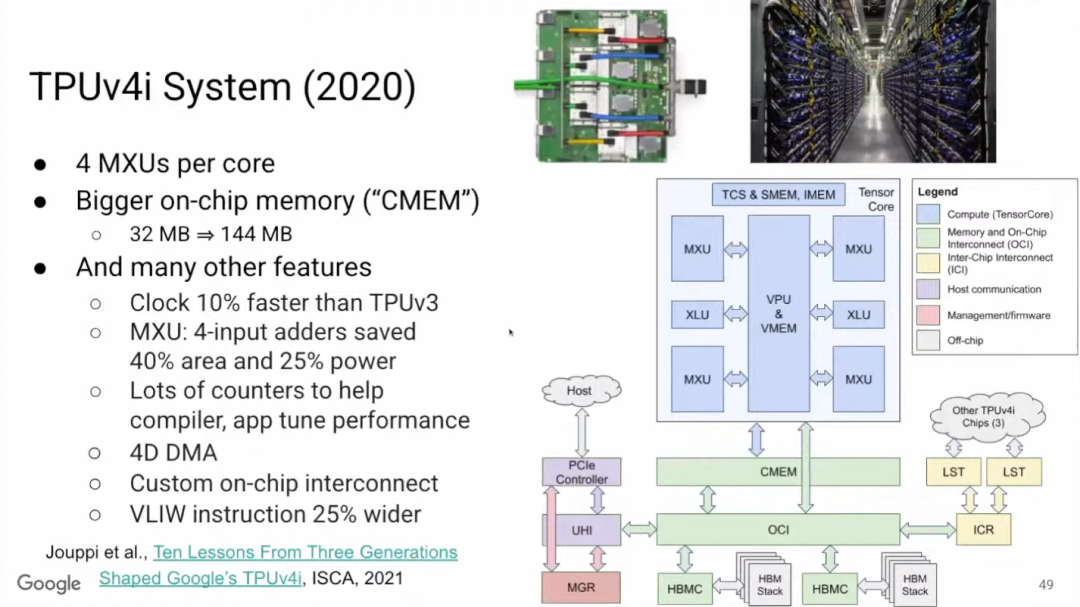
如果想了解TPU v4i,可以阅读论文《Ten Lessons From Three Generations Shaped Google’s TPUv4i》。TPU v4i中,单个Tensor Core有4个矩阵乘法单元,是v3的两倍,且v4i的片上内存更大。此外,TPU v4i的时钟频率加快了10%,矩阵乘法单元中使用四位加法器(4-input adder),可以大幅节省芯片面积和功耗。
性能计数器(Performance counter)的重要性不言而喻,Google在v4i的很多地方都放置了性能计数器,可以更好地协助编译器,并能更清楚地掌握运行情况。
性能计数器没有缓存,它们都在编译器控制的4D DMA (直接存储器访问)之下,并且可以进行自定义互连。最后,为了控制更多的MPU(微处理器)和CMEM,VLIW(超长指令字)指令拓宽到将近400位。
教训九:编译器优化和ML兼容性十分重要
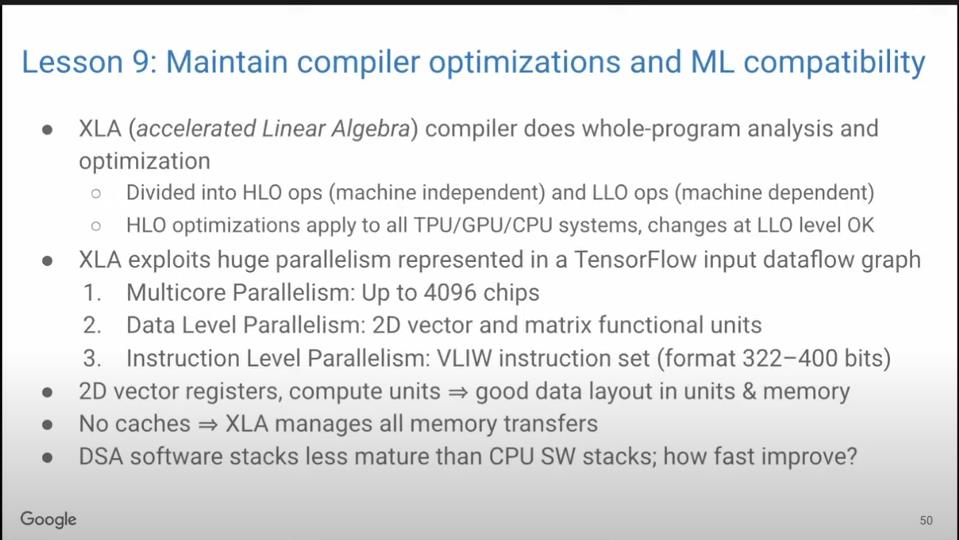
XLA(加速线性代数)编译器可对全程序进行分析和优化,优化分为与机器无关的高级操作和与机器相关的低级操作,高级优化操作将影响TPU和GPU,所以通常我们不会改动高级优化操作,以免导致失灵,但我们可以改动低级优化操作。
XLA编译器可以处理多达4096个芯片的多核并行,2D向量和矩阵功能单元的数据级并行性,以及322~400位VLIW指令集的指令级并行。由于向量寄存器和计算单元是2D,这就要求功能单元和内存中有良好的数据布局。此外,由于没有缓存,所以编译器需要管理所有的内存传输。
最后的问题是,与CPU相比,DSA的软件栈还不够成熟。那么编译器优化最终能够提速多少?
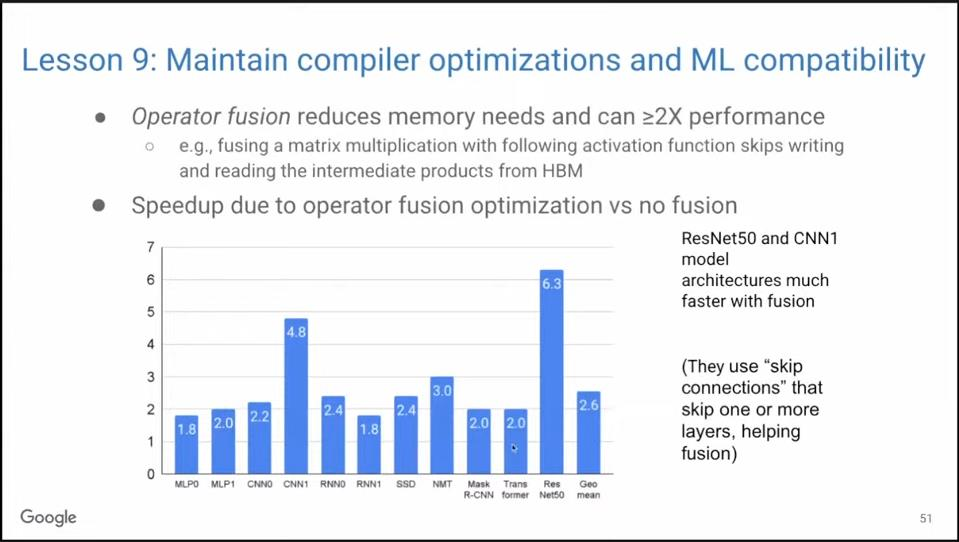
实际上的提速相当可观。其中重要的优化之一称为算子融合(Operator Fusion),如将矩阵乘法与激活函数进行融合,省略将中间结果写入HBM再读取出来的步骤。上图是我们的MLPerf基准测试结果,可见,使用算子融合平均可以带来超两倍的性能提升。
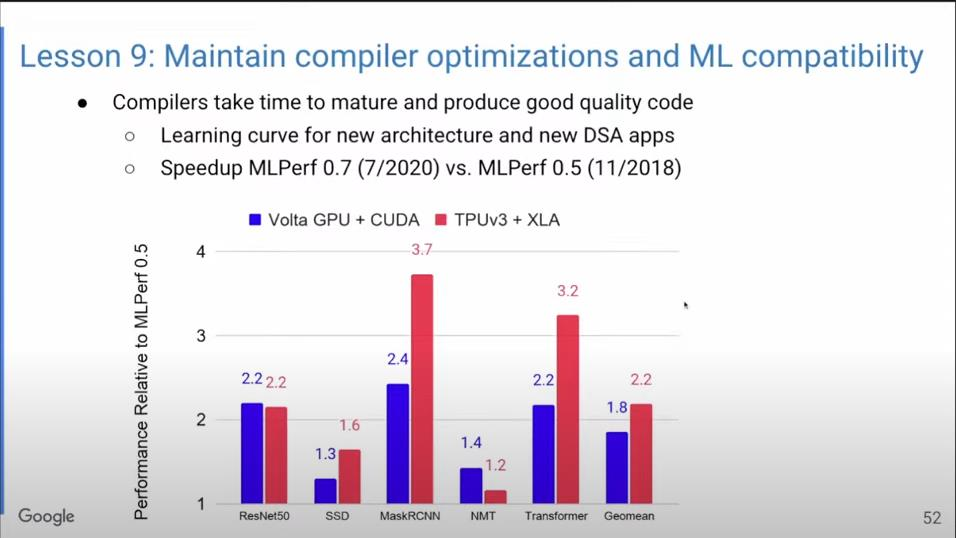
上图显示了编译器优化的提速效果。蓝色表示使用GPU,红色表示使用TPU,经过短短十几个月的优化后,不少模型的性能都提升到了两倍。要知道,对C++编译器而言,如果能在一年内把性能提升5%-10%就已经非常了不起了。
此外,编译器的后向ML兼容性非常重要。我的同事Luiz Barroso主管Google的一个与计算机架构无关的部门,他表示不希望在训练中花太多时间,希望一晚上就可以训练好模型,第二天可以直接部署。我们希望训练和推理时结果一致,这就是我们说的后向ML兼容性,我们还希望它能在所有TPU上运行,而不是每次更改TPU时都要重新训练。
为什么保持后向ML兼容性如此困难?因为浮点加法不符合结合律,所以运算顺序可能会影响运算结果。而TPU的任务就是让所有机器对编译器而言都没有区别,以便可以在重组代码的同时获得相同的高质量结果,以实现后向ML兼容性。
教训十:优化的目标是Perf/TCO还是Perf/CapEx
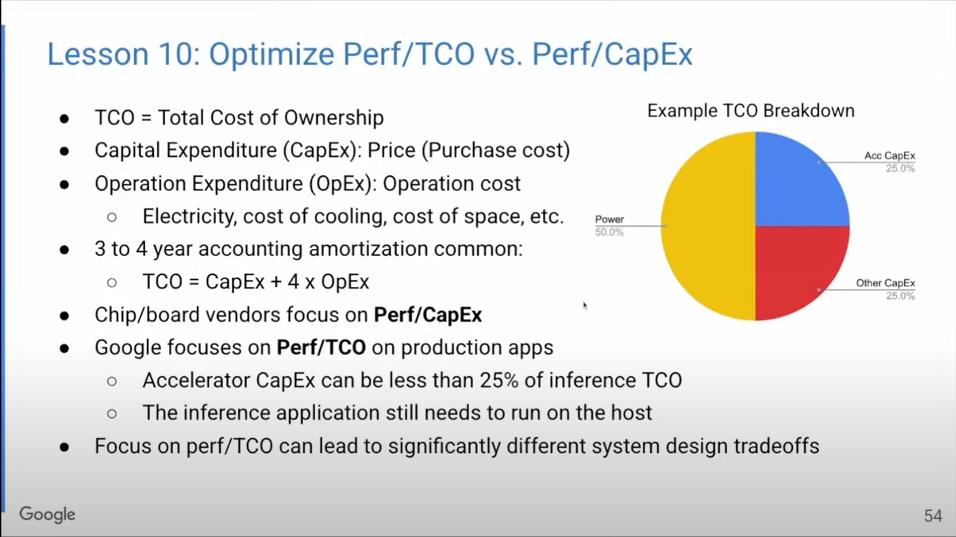
在将研究成果应用到实际生产时,我们优化的目标是什么?Google构建硬件是为了用在自己的数据中心,所以我们所要控制的成本是指总体拥有成本(TCO),包括资本成本(采购成本)和运行成本(电力、冷却、空间成本)。资金成本是一次性的,而运行成本需要持续支出3~4年。
因此,芯片和主板生产商只需要考虑产品性能/资本成本的比率;而Google却要考虑整个硬件生命周期的成本,关注性能/总体拥有成本之间的比率。如上面的饼状图所示,电力可占总体拥有成本的一半。所以,如果把眼光扩大到总体拥有成本上,在系统设计时就很可能会做出不同的取舍。
之前提到,TPU v1有一个Tensor Core,v2和v3有两个。到了v4时,基于对总体拥有成本的考虑,Google决定分开设计:用于训练的TPU v4有两个Tensor Core,用于推理的TPU v4i只有一个。这样就大大提升了性能和总体拥有成本之间的比率。
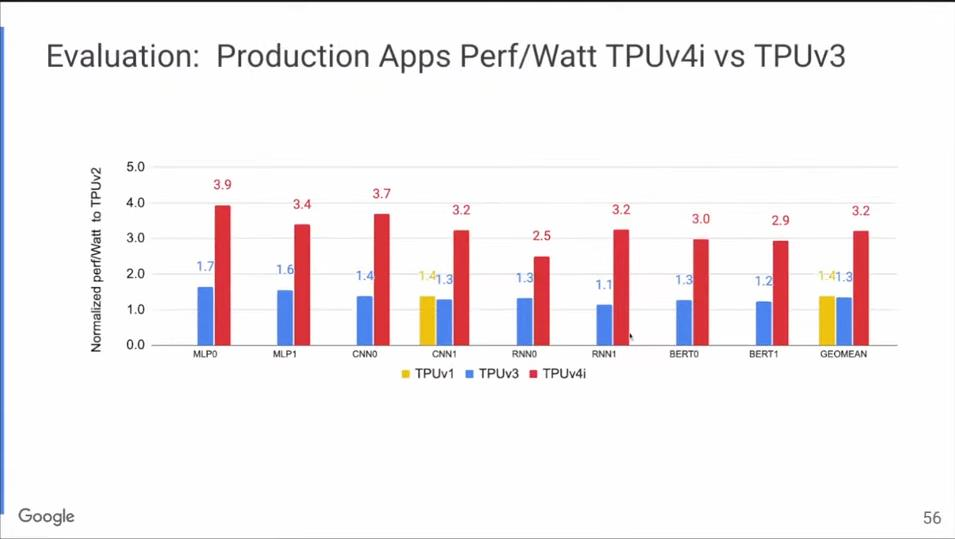
上图是TPU v4i和TPU v3的每瓦性能对比,红色是TPU v4i,蓝色是TPU v3,前者的每瓦性能是后者的两倍以上。
03 提升机器学习能效,减少碳足迹
2021年10月的IEEE Spectrum杂志有一篇文章提到,训练某一模型需要数年时间,花费1000亿美元,总碳排放量相当于纽约一个月的排碳量,如果还要进一步提升模型准确度,这些数字还会更夸张。
2022年1月,又有文章表示,根据当前的算力需求增长曲线预计,到2026年,训练最大AI模型的成本将相当于美国的GDP,大概是20万亿美元。
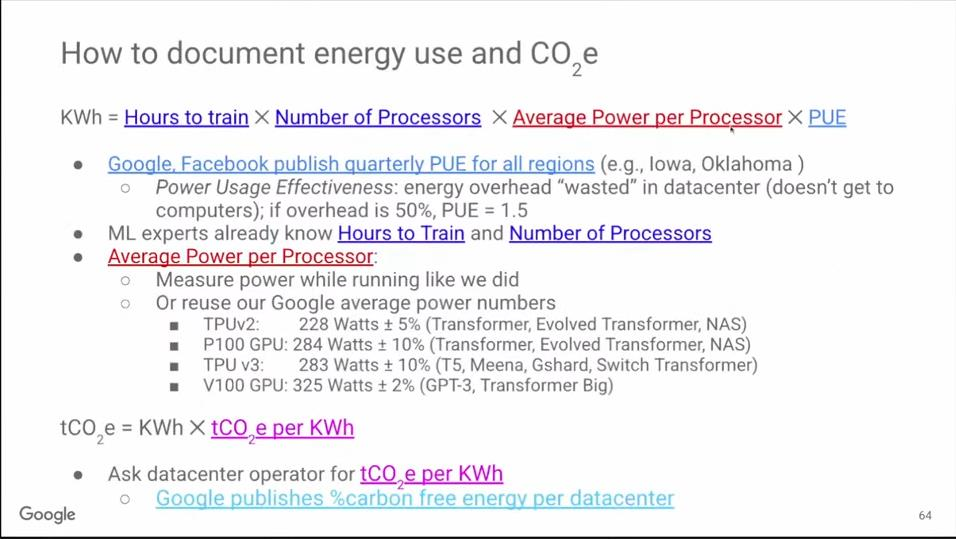
Google研究了ML硬件的能源消耗。不同于全生命周期消耗的能源(包括从芯片制造到数据中心构建的所有间接碳排放),我们只关注硬件运行时的能源消耗。
展望未来,我们有办法让机器学习的能耗降低到原来的100倍,碳排放量降低1000倍。我们可以从四方面协同着手,极大地促进机器学习在更多领域的可持续发展:
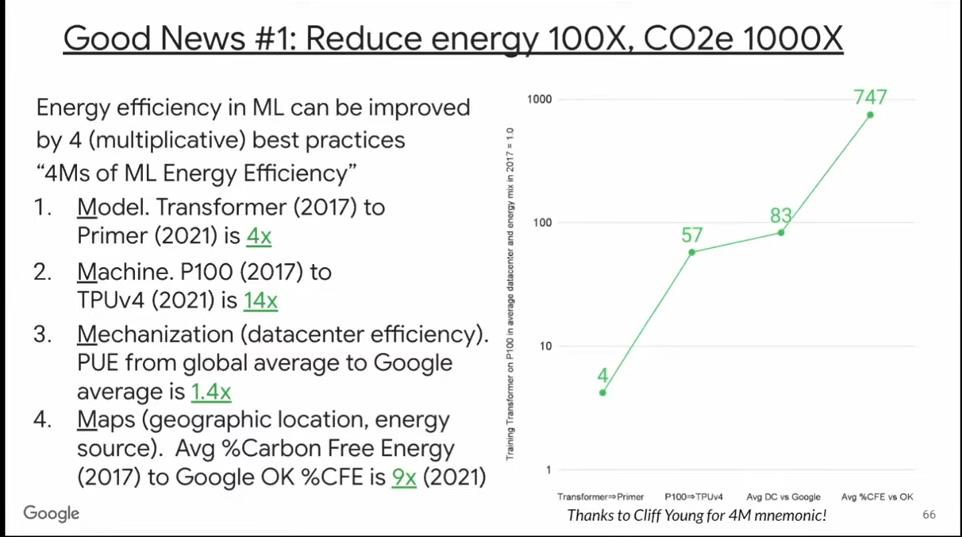
第一个因素是模型。Google在2017年公布Transformer模型,四年后,又开发了Primer模型,其计算质量相同,但能效更高。Primer的能耗和碳排放量相比Transformer降低了4倍。
第二个因素是硬件。2017年所使用的P100 GPU和当前最新TPU的性能相差了14倍。所以,前两个因素结合,可以将能耗和碳排放量降低60倍。
第三个因素是数据中心的能效。Google的PUE大约是其他数据中心的1.4倍。所以,前三个因素累积,可以将能耗和碳排放量降低80倍。
第四个因素是数据中心的地理位置。即使在同一个国家,不同地区使用无碳能源的比例也可能大不相同。在Google所有数据中心所在地中,俄克拉荷马州的无碳能源占比最高,Primer模型就是在此处训练的,这可将碳排放量在上述基础上降低9倍。
综合上述四个因素,我们可将机器学习的能耗降低80倍,碳排放量降低700倍。这非常了不起。
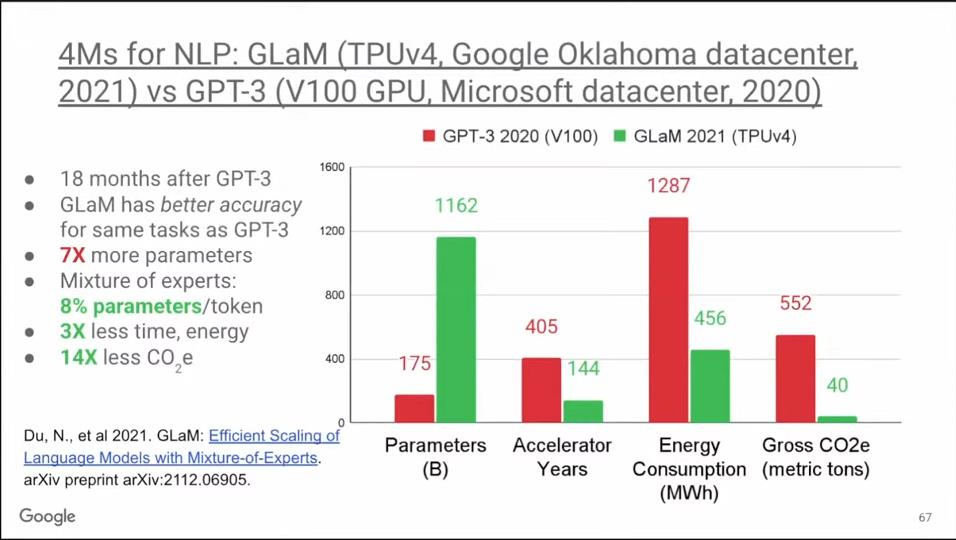
OpenAI的GPT-3问世后引起了Google所有机器学习工程师的注意,他们都铆足了劲想做得更好。18个月后,Google推出了GlaM模型,在相同的基准测试中它的表现比GPT-3更好。GlaM的参数是GPT-3的七倍,达到1.2万亿,但它的能耗却并不大,因为它利用了稀疏性。GlaM是一个MoE模型(Mixture of Experts,专家混合模型),它平时只调用每个token中的8%的参数,而密集型模型会使用100%的参数。因此,GlaM中加速器的工作时长和能耗都降低了3倍。
最后,与GPT-3不同的是,GlaM在俄克拉荷马州使用清洁能源进行训练,因此累计下来,其碳排放量降低了14倍。所以GlaM的例子表明,相比V100 GPU,使用TPU v4既减少了碳排放量,而且计算质量更好。
审核编辑 :李倩
-
从CPU、GPU再到TPU,Google的AI芯片是如何一步步进化过来的?2017-03-15 3682
-
【免费领取】运放十大经典电路(视频21集)2021-10-19 2588
-
TPU透明副牌.TPU副牌料.TPU抽粒厂.TPU塑胶副牌.TPU再生料.TPU低温料2021-11-21 884
-
运放十大经典电路(视频21集)【免费领取!!】2021-12-07 2366
-
电池管理中的十大经典理论2009-11-06 1033
-
PCB布线经验(九大经典文档)2015-12-25 1258
-
数学建模十大经典算法2016-08-08 1543
-
Google发布人工智能芯片TPU 32018-05-14 3660
-
从多个生物识别可穿戴产品开发周期得到的十大经验教训2021-11-10 1513
-
从50多个生物识别可穿戴产品开发周期得到的十大经验教训2022-11-01 564
-
NI获选第八届浦东总部经济十大经典样本,持续助力中国科技创新和产业发展2022-12-01 1908
-
C语言动图演示十大经典排序算法(含代码)2023-01-29 2403
-
Google的TPU芯片的发展历史和硬件架构2023-10-18 6458
-
机器学习的基本流程和十大算法2023-10-31 1952
-
Google推出第七代TPU芯片Ironwood2025-04-16 2228
全部0条评论

快来发表一下你的评论吧 !
