

MS4515DO压力传感器的驱动设计与实现
MEMS/传感技术
描述
很多时候我们需要检测流量和压力这些参数,比如我们要检测大气压,或者通过测量差压来获得输送流体的流量等,都需要用到压力传感器。这一篇我们就来讨论MS4515DO压力传感器的数据获取。
1、功能概述
MS4515DO是TE公司推出的一款基于PCB安装的小型陶瓷基压力传感器。该传感器采用最新的CMOS传感器调节电路,制造出一种低成本、高性能的数字输出压力(14bit)和温度(11bit)传感器,以满足OEM客户最严格的要求。
MS4515DO完全校准和温度补偿,总误差带在补偿范围内小于1.0%。该传感器采用直流3.3V或5.0V单电源供电模式,对外接口采用I2C总线或三线SPI的模式。其结构图如下: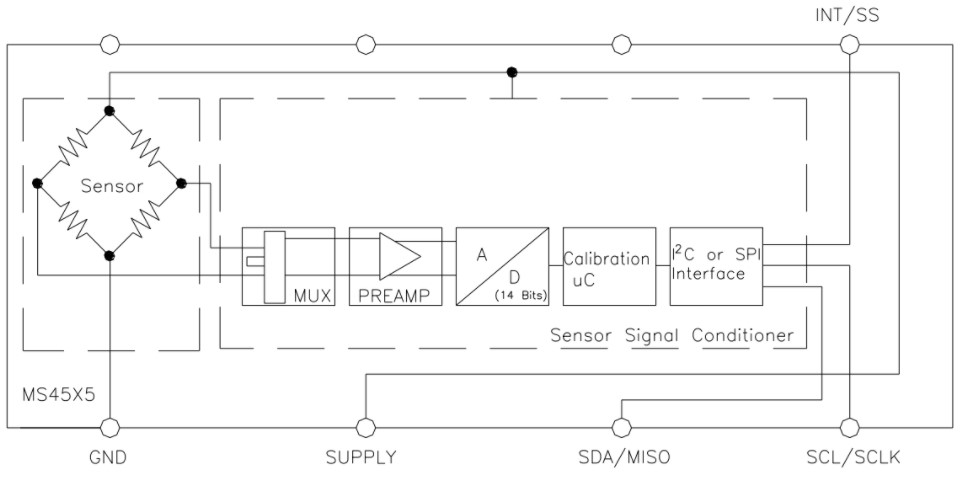
MS4515DO和MS4525DO拥有相同的功能和模式,区别只在于输出的物理量单位不同而已。它们都拥有可以检测差压和绝压的型号,但操作是完全一样的,所以本篇的讨论事实上适用于相关系列的全部型号的应用。
1.1、MS4515DO的I2C地址
作为I2C接口的设备都会有一个设备地址,MS4515DO压力传感器也不例外。而MS4515DO和MS4525DO系列传感器的I2C地址在出厂时已特定写入,并根据型号中的字母来指示其地址设定。具体如下:

预设的设备地址是7位的,不包含读写位的指示。我们使用时需要将其左移一位并根据读写操作来定义读写位,0为写,1为读。
1.2、数据输出格式
在I2C通讯模式下,MS4515DO和MS4525DO传感器有四个I2C读取命令,分别为:Read_MR、Read_DF2、Read_DF3和Read_DF4。这四个命令可以获取不同的数据,这些命令的具体报文格式定义如下图:
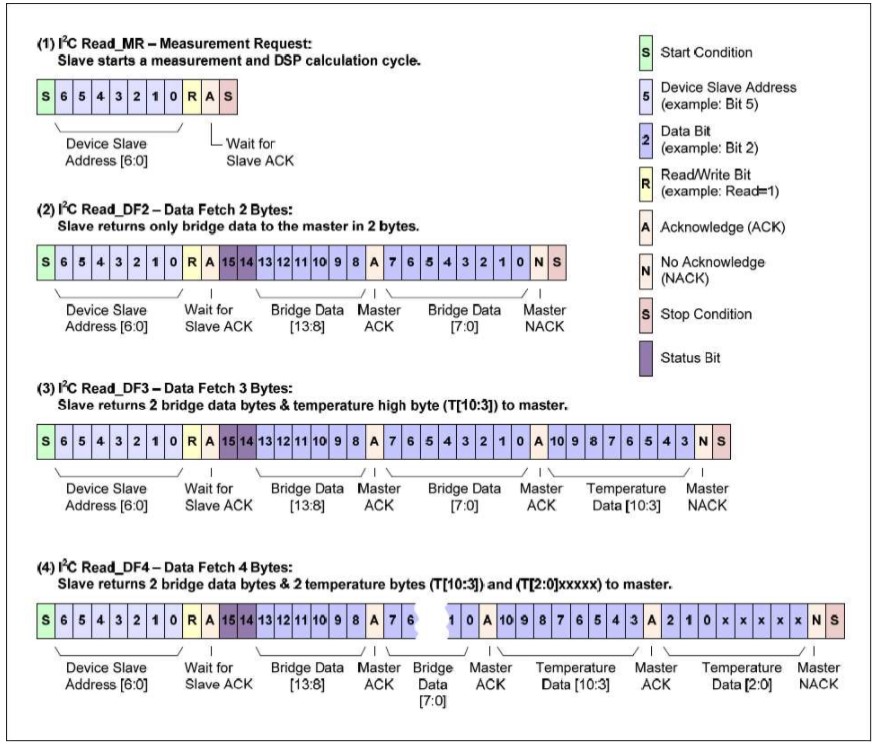
所以我们想要获取MS4515DO和MS4525DO传感器的数据就需要通过上述命令来实现。从上述的命令报文格式可以看出,这些命令在本质上是没有差别的,都多少数据完全由主机来控制,也就是我们开发的驱动程序来控制。事实上,我们只需要考虑Read_DF4这个命令就可以涵盖所有想要的数据。
我们需要注意的是,上述的报文中有两位存储的是状态信息,该状态信息表示获取的数据是最新的数据还是旧数据或者错误报警。通过判断这个数据可以决定我们在数据解析时如何处理相应的报文。
2、驱动设计与实现
我们已经了解了MS4515DO和MS4525DO传感器的结构、接口方式、设备地址以及数据输出格式。接下来我们就可以考虑如何实现MS4515DO和MS4525DO传感器的驱动程序了。
2.1、对象定义
我们依然还是先来考虑MS4515DO和MS4525DO传感器的对象定义。我们定义一个对象无非考虑属性和操作两个部分。
首先我们来考虑MS4515DO和MS4525DO传感器对象的属性。首先MS4515DO和MS4525DO传感器采用I2C接口通讯,所以每台都有一个设备地址。这个地址标识了I2C总线上该设备的唯一性,所以我们将设备地址作为MS4515DO和MS4525DO传感器对象的一个属性。对于MS4515DO和MS4525DO传感器来说存在多种类型,而不同的类型对应不同的数据计算方式,所以针对某一具体实例,我们需要记录它的类型,所以我们为其定义一个类型属性。我们在计算压力值时,不同的量程最后得到的压力值与测量量程有关,所以我们还需要记录实例的量程上下限,所以将这两个数据也定义为对象的属性。为了操作方便我们将最终得到的温度和压力数据也都作为对象的属性。
从前面的描述中,我们知道MS4515DO和MS4525DO传感器的数据输出格式是固定的,这为我们解析这一数据提供了思路。我们将读出的4个字节与我们想要得到的数据组成联合体,利用结构体和联合体在内存中的关系可以方便的解析数据对象,如下图所示:

这些个数据即是我们想要的先要得到的,同时他们也记录了MS4515DO和MS4525DO传感器对象当前的状态,所以我们将其也作为对象的属性。
其次我们来考虑MS4515DO和MS4525DO传感器对象的操作。我们需要将对象的哪些行为定义为操作呢?一般的我们考虑那些不能直接实现,而是要依赖特定的软硬件平台才能实现的对象行为。我们需要向MS4515DO和MS4525DO传感器发送命令,也需要从传感器获取对象,而无论读还是写都是依赖于具体的软硬件平台才能去定的,所以我们将向传感器写信息和从传感器读信息作为对象的2个操作。为了控制时序,我们一般需要演示处理函数,而演示处理函数的实现也是依赖于具体的软硬件平台的,所以我们将延时函数定义为对象的一个操作。
我们分析了MS4515DO和MS4525DO传感器对象可能的属性和操作。根据前述的分析,我们可以定义MS4515DO和MS4525DO传感器对象的类型如下:
/* 定义MS45x5DO对象类型 */typedef struct MS45x5DOObject {
uint8_t devAddress; //设备地址
union {
struct {
uint16_t pressure:14; uint16_t status:2; uint16_t insignificance:5; uint16_t temperature:11;
}pData; uint8_t rData[4];
}msData; //读出的数值
MS45x5DOType type; //MS4515DO的类型
float pUpperRange; //压力量程上限
float pLowerRange; //压力量程下限
float fTemperature; //计算的温度值
float fPressure; //计算的压力值
void (*Write)(struct MS45x5DOObject *ms,uint8_t *wData,uint16_t wSize); //向MS45x5DO写数据
void (*Read)(struct MS45x5DOObject *ms,uint8_t *rData,uint16_t rSize); //从MS45x5DO读数据
void (*Delayms)(volatile uint32_t nTime); //毫秒秒延时函数}MS45x5DOObjectType;
我们定义了MS4515DO和MS4525DO传感器对象的类型,使用该类型我们可以定义我们想要的对象变量,但对象变量需要进行必要的配置才能真正的实例化,这个过程我们将其称之为对象的初始化。
/* 初始化MS45x5DO对象 */void MS45x5DOInitialization(MS45x5DOObjectType *ms, //MS5837对象
uint8_t devAddress, //设备地址
MS45x5DOType type, //MS4515DO的类型
float pMax, //压力量程上限
float pMin, //压力量程下限
MS45x5DOWrite write, //向MS45x5DO写数据函数指针
MS45x5DORead read, //从MS45x5DO读数据函数指针
MS45x5DODelayms delayms //毫秒延时函数指针
){ if((ms==NULL)||(write==NULL)||(read==NULL)||(delayms==NULL))
{ return;
}
ms->Write=write;
ms->Read=read;
ms->Delayms=delayms;
if((devAddress==0x28)||(devAddress==0x36)||(devAddress==0x46)||((0x48<=devAddress)&&(devAddress<=0x51)))
{
ms->devAddress=(devAddress<<1);
} else if((devAddress==0x50)||(devAddress==0x6C)||(devAddress==0x8C)||((0x48<=(devAddress/2))&&((devAddress/2)<=0x51)))
{
ms->devAddress=devAddress;
} else
{
ms->devAddress=0x00;
}
ms->type=type;
ms->fPressure=0.0;
ms->fTemperature=0.0;
ms->msData.rData[0]=0;
ms->msData.rData[1]=0;
ms->msData.rData[2]=0;
ms->msData.rData[3]=0;
if((fabs(pMax)<=0.0000001)&&(fabs(pMin)<=0.0000001))
{
ms->pUpperRange=100.0;
ms->pLowerRange=0.0;
} else
{
ms->pUpperRange=pMax;
ms->pLowerRange=pMin;
}
}
2.2、对象操作
我们已经可以得到一个对象变量并将它实例化,我们还需要考虑它的操作问题。对于MS4515DO和MS4525DO传感器来说其操作比较简单,最主要的操作包括数据获取和地址设定。
2.2.1、获取数据
对于我们来说获取MS4515DO和MS4525DO传感器的测量数据是我们的主要目的。我们可以从MS4515DO和MS4525DO传感器获取压力和温度数据,其测量范围与输出数据的对应关系如下图所示:

根据上表中的数据对应关系,我们可以编写获取MS4515DO和MS4525DO传感器的数据并解析的函数。
/*获取转换值,包括温度和压力*/void GetMS45x5DOConversionValue(MS45x5DOObjectType *ms){ uint8_t rData[4]={0,0,0,0}; float maxCount=16383; float minCount=0;
if(ms->type==MS45x5DO_TypeA)
{
maxCount=13106;
minCount=1638;
} else
{
maxCount=14746;
minCount=819;
}
ms->Read(ms,rData,4);
ms->msData.rData[0]=rData[1];
ms->msData.rData[1]=rData[0];
ms->msData.rData[2]=rData[3];
ms->msData.rData[3]=rData[2];
if(ms->msData.pData.status!=MS45x5DO_Fault)
{
ms->fPressure=(((float)ms->msData.pData.pressure-minCount)/maxCount)*(ms->pUpperRange-ms->pLowerRange)+ms->pLowerRange;
ms->fTemperature=((float)ms->msData.pData.temperature/2047.0)*200.0-50.0;
}
}
2.2.2、地址设置
关于MS4515DO和MS4525DO传感器,在出厂时已经设定了设备地址并在型号编码中给予指示。但在一些特殊情形下我们可能需要修改它的设备地址,这就需要用到MS4515DO和MS4525DO传感器的地址修改操作。
/*修改MS45x5DO的设备地址*/void ModifyMS45x5DODecAddress(MS45x5DOObjectType *ms,uint8_t newAddress){ uint8_t eepromByte[3]; uint16_t eepromTemp=0x00;
//第1步、进入命令模式
eepromByte[0]=0xA0;
eepromByte[1]=0x00;
eepromByte[2]=0x00;
ms->Write(ms,eepromByte,3);
//第2步、发送读EEPROM命令
eepromByte[0]=0x02;
eepromByte[1]=0x00;
eepromByte[2]=0x00;
ms->Write(ms,eepromByte,3);
//第3步、获取EEPROM的值
ms->Read(ms,eepromByte,3);
//第4步、修改为新地址
if(eepromByte[0]==0x5A)
{
eepromTemp=(eepromByte[1]<<8)+eepromByte[2];
eepromTemp=(eepromTemp&0xE007)+0xC00+(newAddress<<3);
eepromByte[1]=(uint8_t)((eepromTemp&0xFF00)>>8);
eepromByte[1]=(uint8_t)(eepromTemp&0x00FF);
} else
{ return;
}
//第5步、将新地址写入EEPROM
eepromByte[0]=0x02;
ms->Write(ms,eepromByte,3);
//第6步、退出命令模式
eepromByte[0]=0x80;
eepromByte[1]=0x00;
eepromByte[2]=0x00;
ms->Write(ms,eepromByte,3);
}
3、驱动的使用
我们已经设计并实现了MS4515DO和MS4525DO压力传感器的驱动程序。接下来我们将简单的说明如何使用这一驱动,并设计一个简单的示例验证这一驱动程序的正确性。
3.1、声明并初始化对象
我们是基于对象设计的MS4515DO和MS4525DO压力传感器的驱动程序,所以在使用驱动时,我们需要先声明一个对象变量,然后基于该对象变量来实现具体的对象操作。我们先声明对象如下:
MS45x5DOObjectType msDP;
声明了这个对象变量之后,我们还需要使用初始化函数对其进行初始化方可使用。这一初始化函数拥有8个参数:
MS45x5DOObjectType *ms, //MS5837对象uint8_t devAddress, //设备地址MS45x5DOType type, //MS4515DO的类型float pMax, //压力量程上限float pMin, //压力量程下限MS45x5DOWrite write, //向MS45x5DO写数据函数指针MS45x5DORead read, //从MS45x5DO读数据函数指针MS45x5DODelayms delayms //毫秒延时函数指针
第一个参数正是我们要初始化的对象变量。第二个参数为我们所要操作的MS4515DO对象的设备地址。第三个参数是MS4515DO对象的具体类型,根据实际设备选择枚举即可。第四和第五个参数是该对象的物理量量程,根据具体对象而定。后面三个参数是实现对象操作的函数指针。这三个函数指针需要我们根据具体的软硬件平台来实现。它们的原型如下:
/*向MS45x5DO下发指令,指令格式均为1个字节*/typedef void (*MS45x5DOWrite)(struct MS45x5DOObject *ms,uint8_t *wData,uint16_t wSize);/*从MS45x5DO读取多个字节数据的值*/typedef void (*MS45x5DORead)(struct MS45x5DOObject *ms,uint8_t *rData,uint16_t rSize);/*毫秒秒延时函数*/typedef void (*MS45x5DODelayms)(volatile uint32_t nTime);
我们根据函数原型定义,在具体的实现平台上实现它们,如我们在STM32平台上可以实现如下:
/ 向MS45x5DO下发指令,指令格式均为1个字节 /
static void WriteToDP(MS45x5DOObjectType *ms,uint8_t *wData,uint16_t wSize)
{
HAL_I2C_Master_Transmit(&hi2c2,ms->devAddress,wData,wSize,1000);
}
/* 从MS45x5DO读取多个字节数据的值* /
static void ReadFromDP(MS45x5DOObjectType *ms,uint8_t *rData,uint16_t rSize)
{
HAL_I2C_Master_Receive(&hi2c2,ms->devAddress,rData, rSize, 1000);
}
  延时函数我们可以直接使用HAL库中的HAL_Delay也可以自己编写,在HAL库中HAL_Delay是一个弱化定义的函数,我们可以重写这一函数来实现不同的应用需求。到这里我们就可以使用对象初始化函数来初始化前面声明的对象变量了。具体如下:
```C++MS45x5DOInitialization(&msDP, //MS5837对象
0x28, //设备地址
MS45x5DO_TypeA, //MS4515DO的类型
DPUpperRange, //压力量程上限
DPLowerRange, //压力量程下限
WriteToDP, //向MS45x5DO写数据函数指针
ReadFromDP, //从MS45x5DO读数据函数指针
HAL_Delay //毫秒延时函数指针
);
3.2、基于对象进行操作
完成了对象的初始化后,我们就可以基于对象来实现相应的操作了。如我们使用驱动获取msDP对象的差压数据如下:
/*差压数据获取*/void GetFlowDPDatas(void){
GetMS45x5DOConversionValue(&msDP);
aPara.phyPara.dPressure =msDP.fPressure;
aPara.phyPara.dTemperature=msDP.fTemperature;
}
4、应用总结
我们设计并实现了MS4515DO和MS4525DO压力传感器对象的驱动程序,并基于驱动程序实现了一个简单的测试实例,获得的结果如下:
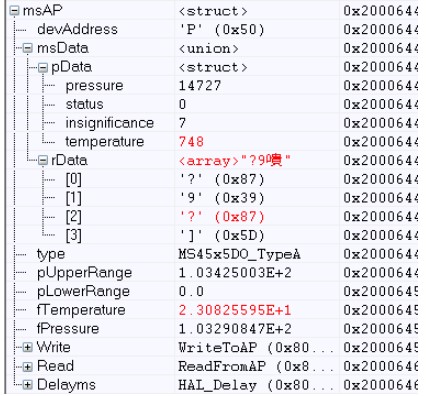
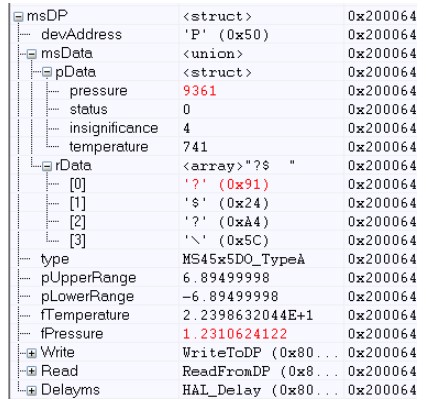
从上述两图中我们可以知道我们的驱动程序是正确的。事实上这一驱动已应用于我们的流量测量设备中,实现的效果良好。
-
MS4525DO-DS5AI001DP压力传感器驱动例程2023-06-13 2955
-
4515DO-DS3AI002DS呼吸机压力传感器2023-06-07 1349
-
MS4525DO-DS5AI001DP压力传感器的作用2023-06-05 1202
-
4515DO-DS3BK005DP压力传感器用于可穿戴传感器领域2023-05-12 1235
-
MS5837压力传感器的驱动设计与实现2022-12-09 4837
-
MS4525DO PCB压力传感器的数据手册免费下载2021-03-03 2063
-
如何正确使用O型圈密封压力传感器MS58372020-07-08 4241
-
高精度TE压力传感器/位置传感器/湿度传感器2020-07-07 3649
-
ms5803-01ba压力传感器2018-06-11 8844
-
压力传感器,压力传感器是什么意思2010-03-03 6421
全部0条评论

快来发表一下你的评论吧 !
