

 六维力/六轴力传感器的侧重方式
六维力/六轴力传感器的侧重方式
电子说
1.4w人已加入
描述
六维力传感器的工作方式多种多样,操作的基本原理是将机械应力(力、扭矩等)转化为电信号。当力作用于可变形的弹性轴(通常以应变计的形式)时; 机械变形量被转换成电信号,电信号被转换成数字来指示可量化的测量值。
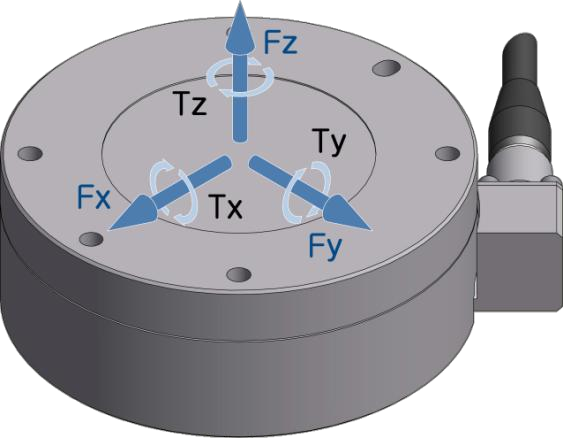
测得的力和扭矩通常分别用牛顿(N)和牛顿米(Nm)表示。这些测量然后被分割成6个轴 Fx, Fy, Fz, Tx, Ty, Tz,其中F表示线性力,T表示旋转扭矩。
审核编辑 黄昊宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
- 相关推荐
- 热点推荐
- 传感器
-
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?2026-04-29 343
-
2026年全球机器人六轴力传感器市场分析报告2026-07-21 168
-
ROBOTOUS电容式六维力传感器2023-04-13 1253
-
六轴力传感器有哪些种类2020-09-15 10113
-
ROBOTOUS-RFT系列六维力传感器2022-11-28 1953
-
RFT系列六维力/六轴力传感器的测定原理和方式2022-12-21 2451
-
六维力传感器有什么作用?可以数据采集并进行监控吗?2023-06-29 2573
-
六轴力/六维力传感器在工业、科研、医疗等领域的广泛应用2023-07-31 2458
-
基于六维力传感器的机械臂自动装配应用2024-06-06 2497
-
深入了解六轴力传感器:原理、分类与应用2024-08-02 4422
-
六分力传感器的核心工作原理及其在各个领域的应用2024-11-22 1963
-
人形机器人核心配件之六维力传感器2025-04-15 2340
-
六维力传感器的技术、应用与核心指标2025-04-20 2938
-
六维力传感器是维度最高的力觉传感器2026-04-30 3196
-
如何降低六维力传感器的信号噪声2026-06-15 468
全部0条评论

快来发表一下你的评论吧 !
