

HLPM025K3 PM2.5传感器的驱动设计与实现
MEMS/传感技术
描述
现在人们对大气环境及室内环境都比较关注。PM2.5在生活中也是常见的词汇。在有些产品中就要求检测PM2.5的数值。检测PM2.5的手段多种多样,在要求不高时我们通常可以采用激光模块。在这一篇中,我们将讨论HLPM025K3 PM2.5传感器驱动的设计与实现。
1、功能概述
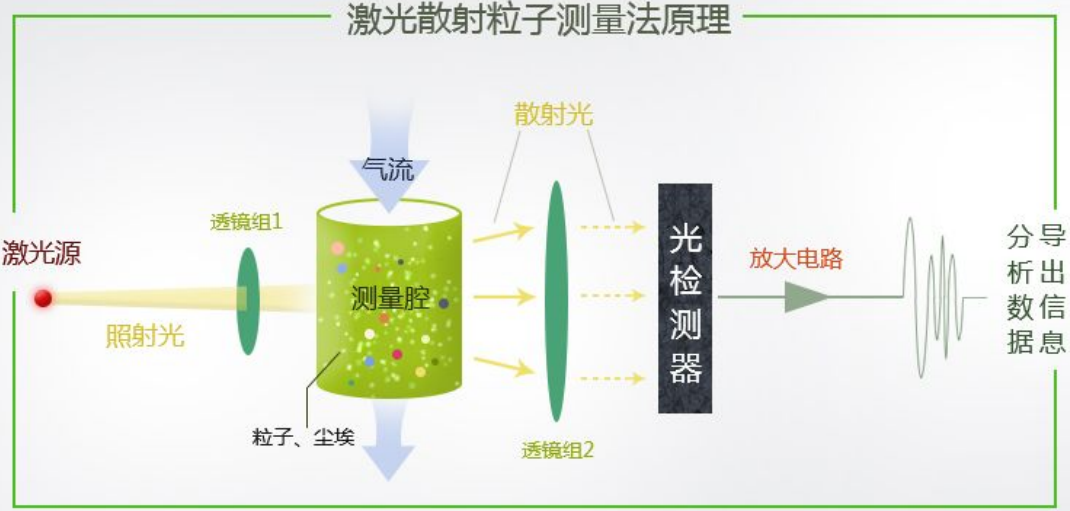
HLPM025K3传感器采用激光散射原理。即令激光照射在空气中的悬浮颗粒物上产生散射,同时在某一特定角度收集散射光,得到散射光强随时间变化的曲线。通过稳定的气 体对流系统,使外界空气均匀的通过自主研发设计的风路,同时在风路中设有多个精密的光学传感器,可以精确的获得粒子的尺寸、速度和质量等信息,加以统计学原理,继而计算出总的粒子质量,从而实时的得到空气中所被关注的粒子的浓度,达到检测PM2.5以及PM10的目的。其基本原理如下图所示:
HLPM025K3传感器采用串行通讯,采用6脚通讯接口,其引脚定义如下图所示:

HLPM025K3传感器采用TTL串行通讯,采用9600的波特率,8为数据位,1为停止位,无校验的方式。HLPM025K3传感器通讯采取主动发送模式,0.8到1.2秒发送一次数据。其数据包含7个字节,具体格式如下:

其中,校验位=PM2.5(H)+PM2.5(L)+PM10(H)+PM10(L)
接收到的数据按公式计算后得到 PM2.5 和 PM10 的值。
PM2.5 = (PM2.5(H)×256 + PM2.5(L))×0.1;
PM10 = (PM2.5(H)×256 + PM2.5(L))×0.1;
2、驱动设计与实现
我们已经了解了HLPM025K3型PM2.5传感器的基本情况。在这一节中我们将设计并实现HLPM025K3型PM2.5传感器的驱动。
2.1、对象定义
在使用一个对象之前我们需要获得一个对象。同样的我们想要HLPM025K3 PM2.5传感器就需要先定义HLPM025K3 PM2.5传感器的对象。
2.1.1、对象的抽象
我们要得到HLPM025K3 PM2.5传感器对象,需要先分析其基本特性。一般来说,一个对象至少包含两方面的特性:属性与操作。接下来我们就来从这两个方面思考一下HLPM025K3 PM2.5传感器的对象。
先来考虑属性,作为属性肯定是用于标识或记录对象特征的东西。我们来考虑HLPM025K3 PM2.5传感器对象属性。我们将测量数据作为对象的属性,因为他们表示了对象当前的状态。
接着我们还需要考虑HLPM025K3 PM2.5传感器对象的操作问题。对象本身除了接受数据并没有什么需要操作的。我们使用队列来存储接收到的数据,所以入队出队过程可看作是其操作。
根据上述我们对HLPM025K3 PM2.5传感器的分析,我们可以定义HLPM025K3 PM2.5传感器的对象类型如下:
/*定义HLPM025K3对象类型*/
typedef struct HlpmObject {
float pm25; //PM2.5测量值
float pm100; //PM10测量值
struct DwinRxBuffer{
uint8_t queue[HLPMRxBufferLength]; //键值存储队列
uint8_t pRead; //读队列指针
uint8_t pWrite; //写队列指针
uint16_t (*DeQueue)(struct HlpmObject *hlpm,uint8_t *rxBuf); //出队操作
void (*EnQueue)(struct HlpmObject *hlpm,uint8_t rData); //入队操作
}rxBuffer; //定义接收缓存队列
}HlpmObjectType;
2.1.2、对象初始化
我们知道,一个对象仅作声明是不能使用的,我们需要先对其进行初始化,所以这里我们来考虑HLPM025K3 PM2.5传感器对象的初始化函数。一般来说,初始化函数需要处理几个方面的问题。一是检查输入参数是否合理;二是为对象的属性赋初值;三是对对象作必要的初始化配置。据此我们设计HLPM025K3 PM2.5传感器对象的初始化函数如下:
/*HLPM对象初始化函数*/
void HlpmInitialization(HlpmObjectType *hlpm)
{
if(hlpm==NULL)
{
return;
}
hlpm->pm25=0.0;
hlpm->pm100=0.0;
hlpm->rxBuffer.pRead=0;
hlpm->rxBuffer.pWrite=0;
hlpm->rxBuffer.EnQueue=BufferDataEnQueue;
hlpm->rxBuffer.DeQueue=BufferDataDeQueue;
}
2.2、对象操作
我们已经完成了HLPM025K3 PM2.5传感器对象类型的定义和对象初始化函数的设计。但我们的主要目标是获取对象的信息,接下来我们还要实现面向HLPM025K3 PM2.5传感器的各类操作。
由于HLPM025K3 PM2.5传感器对象是自主发送,所以我们需要做的就是接收消息并解析。
/*解析PM2.5和PM10的数据*/
bool ParsingPMData(HlpmObjectType *hlpm)
{
uint16_t length=0;
uint8_t receivedData[7]={0};
bool isValid=false;
length=hlpm->rxBuffer.DeQueue(hlpm,receivedData);
if(length>0)
{
isValid=CheckDataIsValid(receivedData);
if(isValid)
{
hlpm->pm25=SynthesisPMValue(receivedData+1);
hlpm->pm100=SynthesisPMValue(receivedData+3);
}
}
return isValid;
}
3、驱动的使用
我们已经设计并实现了HLPM025K3 PM2.5传感器对象的驱动程序。接下来我们设计一个简单的应用来验证这一驱动程序是否可行。
3.1、声明并初始化对象
使用基于对象的操作我们需要先得到这个对象,所以我们先要使用前面定义的HLPM025K3 PM2.5传感器对象类型声明一个HLPM025K3 PM2.5传感器对象变量,具体操作格式如下:
HlpmObjectType hlpm;
声明了这个对象变量并不能立即使用,我们还需要使用驱动中定义的初始化函数对这个变量进行初始化。这个初始化函数所需要的输入参数如下:
HlpmObjectType *hlpm,HLPM025K3 PM2.5传感器对象
这个对象变量我们已经定义了,所以只需输入这个对象就好了。于是我们可以调用初始化函数如下:
HlpmInitialization(&hlpm);
对于串口通讯,我们可以使用多种方式,我们在此使用中断来接收数据,具体实现如下:
//数据接收中断处理函数
void HLPM_USART_ReceiveDataHandle(void)
{
uint8_t res;
// 接收寄存器为空,等待字节被对应的串口完全接收
if(__HAL_UART_GET_FLAG(&hlpmhuart,UART_FLAG_RXNE)!=RESET)
{
// 获取接收到的字节数
HAL_UART_Receive(&hlpmhuart,&res,1,1000);
hlpm.rxBuffer.EnQueue(&hlpm,res);
__HAL_UART_CLEAR_FLAG(&hlpmhuart,UART_FLAG_RXNE);
}
}
3.2、基于对象进行操作
我们定义了对象变量并使用初始化函数给其作了初始化。接着我们就来考虑操作这一对象获取我们想要的数据。我们在驱动中已经将获取数据并转换为转换值的比例值,接下来我们使用这一驱动开发我们的应用实例。
/*数据获取*/
void GetDataFromHLPM025K3(void)
{
float pm25Value;
float pm10Value;
ParsingPMData(&hlpm);
pm25Value=hlpm.pm25;
pm10Value=hlpm.pm100;
}
4、应用总结
我们已经设计并实现了HLPM025K3 PM2.5传感器对象的驱动程序,并且设计了简单的验证程序。HLPM025K3 PM2.5传感器的操作本身比较简单,只需要通过串口获取数据就可以了。
驱动中采用了FIFO队列存储接收到的HLPM025K3 PM2.5传感器数据,主要是考虑到被动接收的情况下,能够保证正确的解析数据。如果不使用也是没有问题的,本身不是HLPM025K3 PM2.5传感器对象所必需的。
-
pm2.5传感器有什么作用?有哪几种?2021-06-29 2238
-
浅谈室内PM2.5污染物来源以及PM2.5传感器的应用2020-10-10 2875
-
一文知道pm2.5传感器的工作原理2020-08-17 7551
-
英国Alphasense公司研发并推出PM2.5传感器OPC-N3与OPC-R12020-08-03 2153
-
对于PM2.5检测仪,它更适合用哪种PM2.5传感器2020-07-30 2042
-
勒夫迈|什么pm2.5传感器模块好?性价比高的PM2.5传感器有哪些?2020-05-08 1969
-
勒夫迈|pm2.5传感器模块选择及应用2020-04-23 2147
-
勒夫迈|空气净化器里的PM2.5传感器:红外or激光?2020-03-25 2493
-
PM2.5传感器在室内空气净化设备中的使用2018-12-06 3357
-
夏普 PM2.5小型检测传感器 10秒内检测PM2.5浓度2018-04-20 6614
-
PM2.5传感器2016-12-22 3172
-
PM2.5检测仪什么牌子好用?思乐智的PM2.5检测仪,PM2.5测试仪器怎么样?2016-11-29 3771
-
攀藤PM2.5激光传感器资料2016-03-14 2417
-
华曼PM2.5粉尘传感器/模块助力绿色城市建设2014-04-18 4930
全部0条评论

快来发表一下你的评论吧 !
