

基于单片机的Led跑马灯实现
描述
2.1 原理图分析
查看EK-RA6M4的原理图,如下图所示,该开发板上有3个Led指示灯。
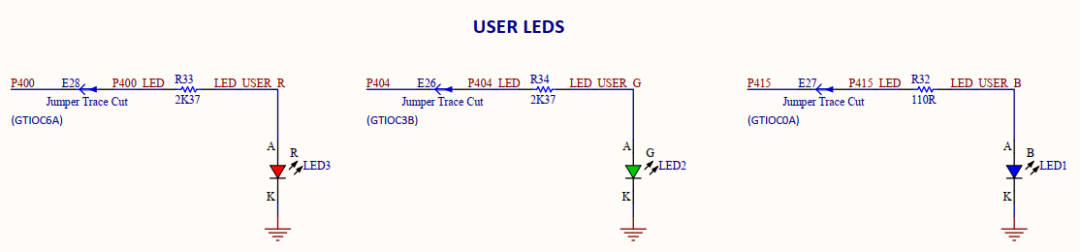
根据原理图可知,这三个Led的控制逻辑为:
| Led灯 | LED3 | LED2 | LED1 |
|---|---|---|---|
| 颜色 | 红色 | 绿色 | 蓝色 |
| 引脚 | P400 | P404 | P415 |
| 电平 | 高电平亮、低电平灭 | 高电平亮、低电平灭 | 高电平亮、低电平灭 |
2.2 创建工程
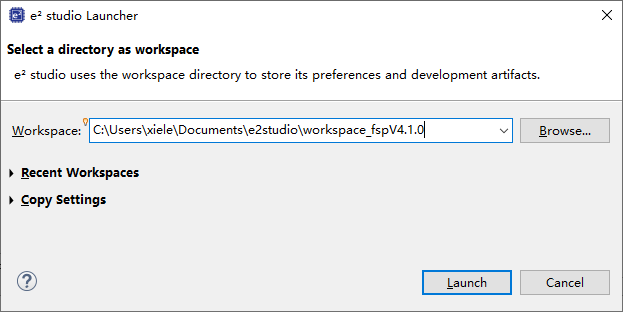
在开始菜单的FSP v4.1.0里点击运行e2studio。然后点击 File -> Switch Workspace -> Other... ,然后选择刚才创建的工作路径并点击 Launch启动。
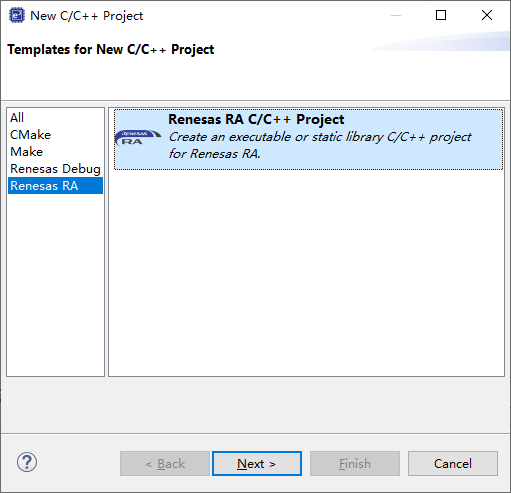
接下来点击 File -> C/C++ Project 创建 Renesas RA C/C++ Project 。接下来设置我们的项目名为 MyBoard 。
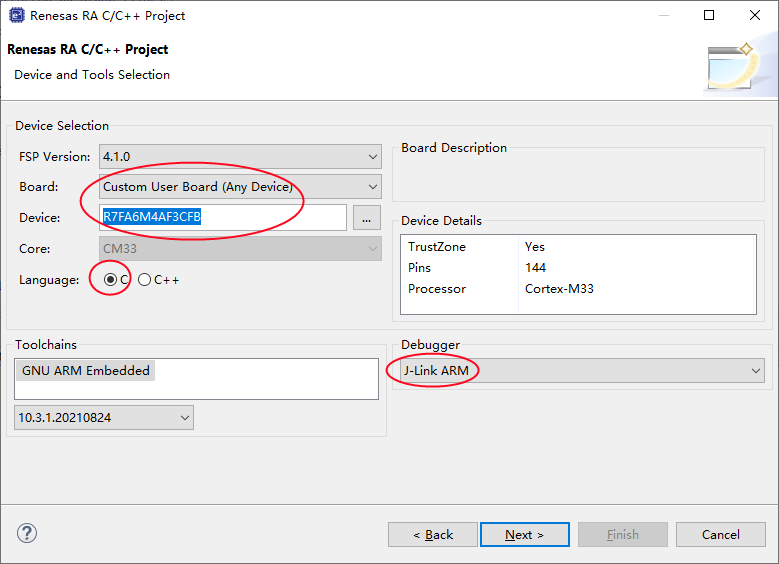
在接下来的配置中,我们定制开发我们的开发板,Board选择“Custom User Board (Any Device) ”,Device选择"R7FA6M4AF3CFB",以及烧录调试器的类型。下一步我们就选择 Flat (Non-TrustZone) Project 。
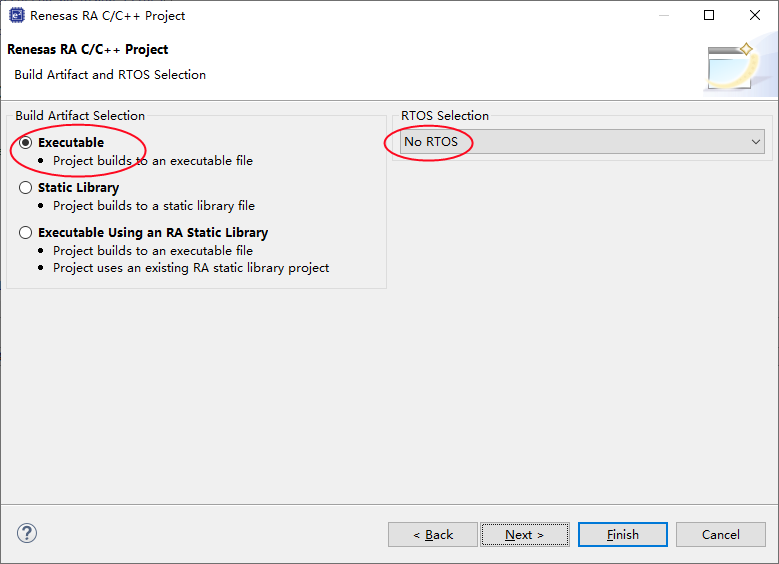
接下来的操作系统类型,选择 No RTOS 。
项目模板选择 Bare Metal -Minimal
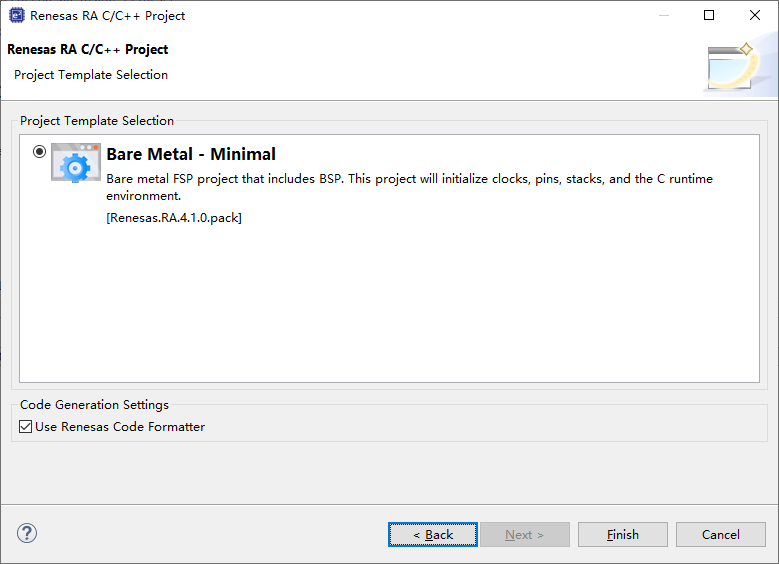
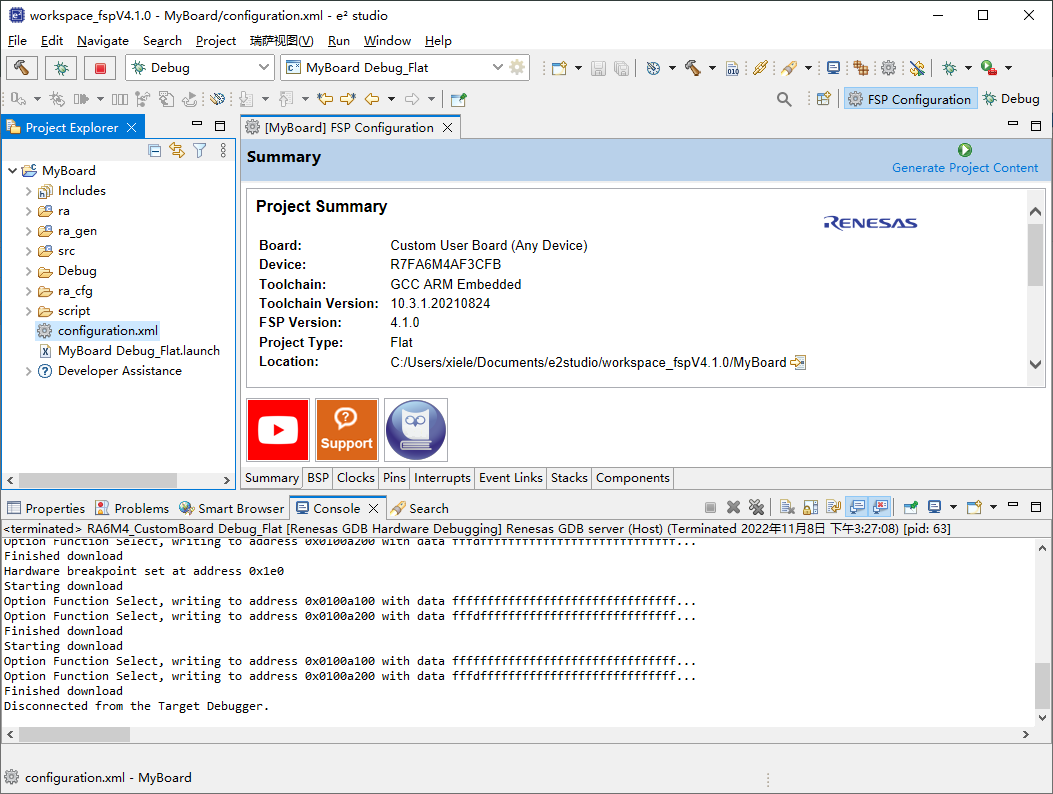
接下来,创建好的项目如下图所示。
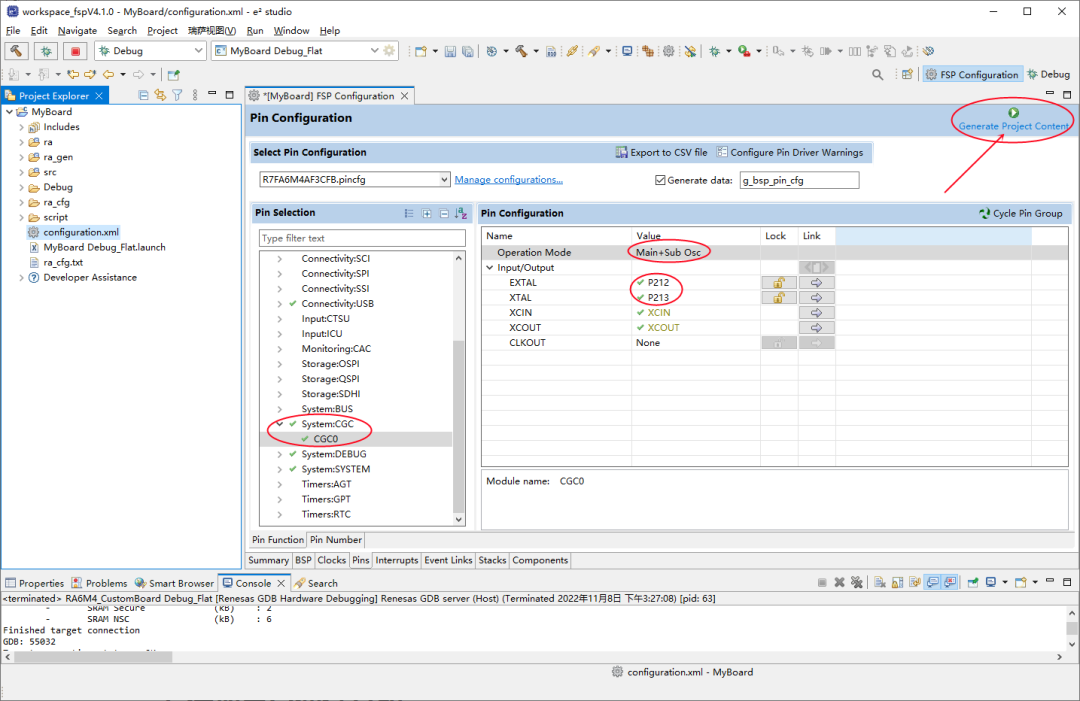
2.3 Pins引脚配置
接下来我们打开项目中的FSP配置文件,配置三个Led灯的引脚为GPIO模式,并分别配置它们的别名为LedRed(P400)、LedGreen(P404)、LedBlue(P415)。
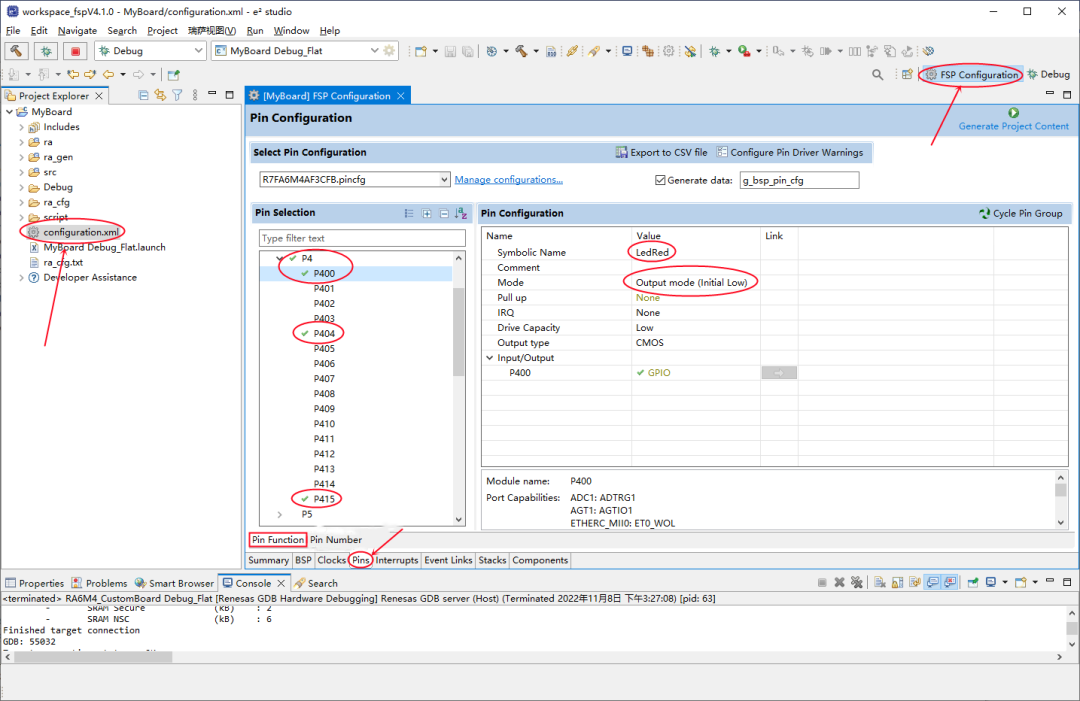
- 通过 Symbolic Name 字段可以修改该GPIO的名称为 LedRed,它将在IDE自动生成的文件 ra_cfg/fsp_cfg/bsp/bsp_pin_cfg.h 中定义;
- 通过 Mode 字段可以修改GPIO口的工作模式,它们将在IDE自动生成的文件 ra_gen/pin_data.c 中定义;
然后再配置使能外部晶振,并重新生成代码。
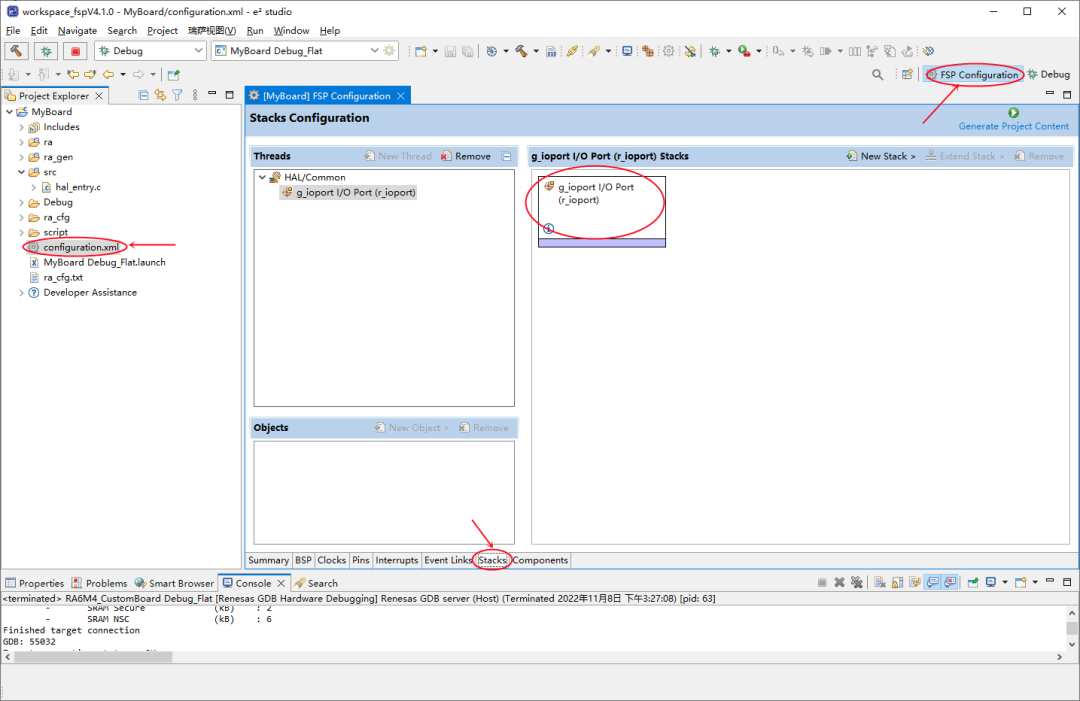
2.4 Stack配置
e2studio生成的项目,默认添加的GPIO的stack,这里我们不需要进行任何的修改。
2.5 源码修改
接下来,我们使用添加 src/bsp_led.h 头文件,在里面添加Led的相关定义及操作函数声明如下:
#ifndef BSP_LED_H_
#define BSP_LED_H_
/** Information on how many LEDs and what pins they are on. */
typedef struct st_bsp_leds
{
uint16_t led_count; ///< The number of LEDs on this board
uint16_t const * p_leds; ///< Pointer to an array of IOPORT pins for controlling LEDs
} bsp_leds_t;
/** Available user-controllable LEDs on this board. These enums can be can be used to index into the array of LED pins
* found in the bsp_leds_t structure. */
typedef enum e_bsp_led
{
BSP_LEDBLUE, ///< LED1
BSP_LEDGREEN, ///< LED2
BSP_LEDRED, ///< LED3
} bsp_led_t;
/** Available user-controllable LEDs on this board. These enums can be used to turn on/off LED. */
typedef enum e_bsp_led_status
{
BSP_LEDOFF, ///< Turn off LED
BSP_LEDON, ///< Turn on LED
} bsp_led_status_t;
extern const bsp_leds_t g_bsp_leds;
extern void turn_led(bsp_led_t which, bsp_led_status_t status);
#endif /* BSP_LED_H_ */
然后再添加 src/bsp_led.c 源文件如下:
#include "bsp_api.h"
#include "bsp_led.h"
#include "bsp_pin_cfg.h"
/** Array of LED IOPORT pins. */
static const uint16_t g_bsp_prv_leds[] =
{
(uint16_t) LedBlue,
(uint16_t) LedGreen,
(uint16_t) LedRed,
};
/** Structure with LED information for this board. */
const bsp_leds_t g_bsp_leds =
{
.led_count = (uint16_t) ((sizeof(g_bsp_prv_leds) / sizeof(g_bsp_prv_leds[0]))),
.p_leds = &g_bsp_prv_leds[0]
};
/** Function to turn Led on or off for this board. */
void turn_led(bsp_led_t which, bsp_led_status_t status)
{
if(which >= g_bsp_leds.led_count )
{
return ;
}
if( BSP_LEDOFF == status )
{
R_BSP_PinWrite(g_bsp_leds.p_leds[which], BSP_IO_LEVEL_LOW);
}
else
{
R_BSP_PinWrite(g_bsp_leds.p_leds[which], BSP_IO_LEVEL_HIGH);
}
}
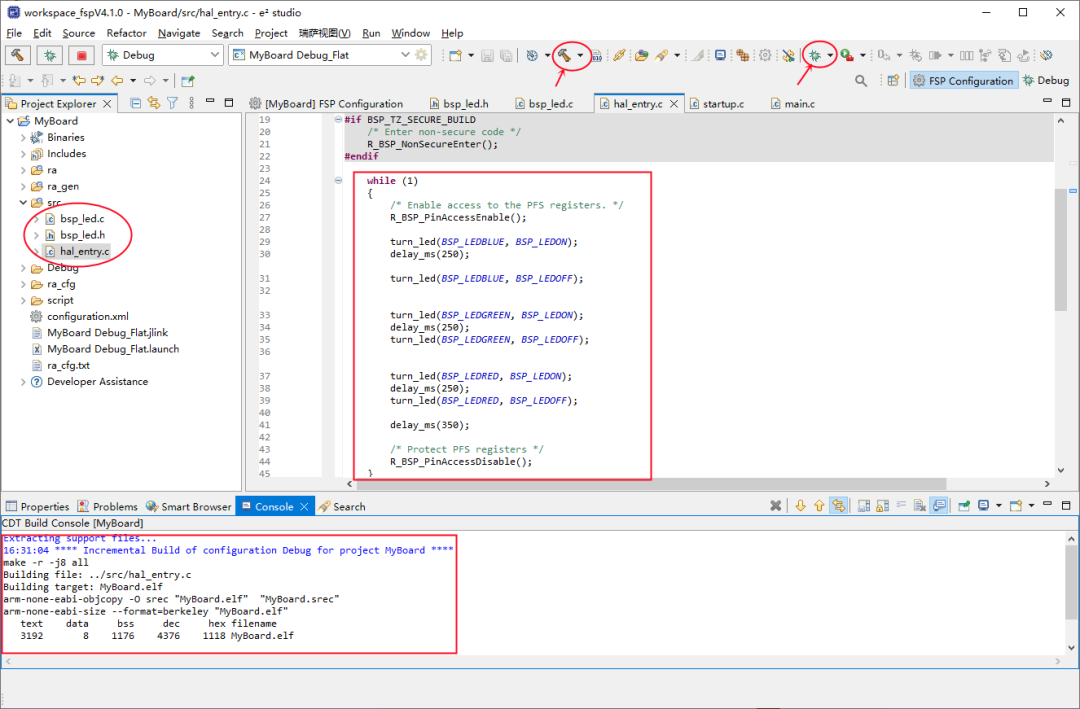
接下来,我们可以修改 src/hal_entry.c 源文件,在里面添加毫秒级延时宏函数 delay_ms() 以及 Led 跑马灯的控制代码。
#include "bsp_led.h"
#define delay_ms(ms) R_BSP_SoftwareDelay(ms, BSP_DELAY_UNITS_MILLISECONDS)
... ...
void hal_entry(void)
{
/* TODO: add your own code here */
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
R_BSP_PinAccessEnable(); /* Enable access to the PFS registers. */
while (1)
{
turn_led(BSP_LEDBLUE, BSP_LEDON);
delay_ms(250);
turn_led(BSP_LEDBLUE, BSP_LEDOFF);
turn_led(BSP_LEDGREEN, BSP_LEDON);
delay_ms(250);
turn_led(BSP_LEDGREEN, BSP_LEDOFF);
turn_led(BSP_LEDRED, BSP_LEDON);
delay_ms(250);
turn_led(BSP_LEDRED, BSP_LEDOFF);
delay_ms(350);
}
}
- R_BSP_PinAccessEnable() 函数必须使能,否则不能操作GPIO的寄存器;
2.5 编译运行
代码修改完成后,在开发板上编译运行,会发现三个Led跑马灯运行。
-
在单片机的P0端口如何去实现LED跑马灯呢2021-10-19 1741
-
如何利用51单片机点亮LED灯实现跑马灯效果?2021-11-08 2790
-
跑马灯2016-05-09 1084
-
基于单片机的跑马灯程序及电路设计2017-05-15 2112
-
基于proteus的七种跑马灯效果的实现2017-12-18 30510
-
如何用51单片机数码管实现跑马灯功能?2018-07-20 15211
-
使用51单片机实现LED跑马灯功能的电路和程序免费下载2019-08-07 1483
-
使用单片机实现跑马灯的实验资料合集免费下载2019-08-02 2339
-
使用8051单片机实现跑马灯的汇编语言免费下载2019-07-19 1518
-
使用51单片机实现跑马灯的程序免费下载2019-07-04 1411
-
使用单片机实现跑马灯的仿真电路图和工程文件免费下载2020-05-12 1541
-
STC单片机实现跑马灯的C51程序免费下载2020-06-05 1722
-
使用单片机实现跑马灯的程序免费下载2020-06-18 1352
-
51单片机实验——跑马灯实验2021-11-23 1634
-
基于51单片机的多模式音乐跑马灯2024-10-22 2601
全部0条评论

快来发表一下你的评论吧 !
