

如何创建FreeRTOS项目
描述
在该章节中,我们将介绍如何创建FreeRTOS项目,并创建两个线程:一个线程将让Led每隔600ms闪烁一次,另外一个线程则让串口每隔1.5s输出一个打印。
10.1 创建FreeRTOS项目
在e2studio上点击 File -> C/C++ Project 创建 Renesas RA C/C++ Project 。 接下来设置我们的项目名为 MyBoard 。
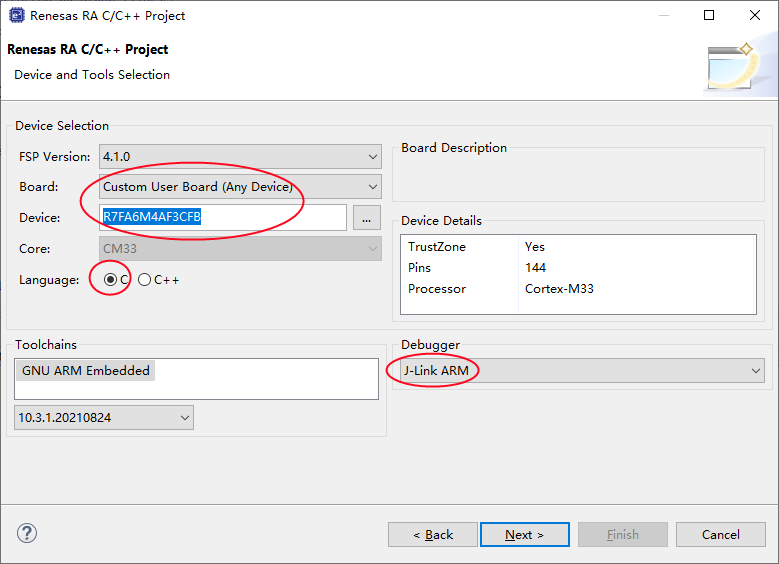
在接下来的配置中,我们定制开发我们的开发板,Board选择“Custom User Board (Any Device) ”,Device选择"R7FA6M4AF3CFB",以及烧录调试器的类型。下一步我们就选择 Flat (Non-TrustZone) Project 。
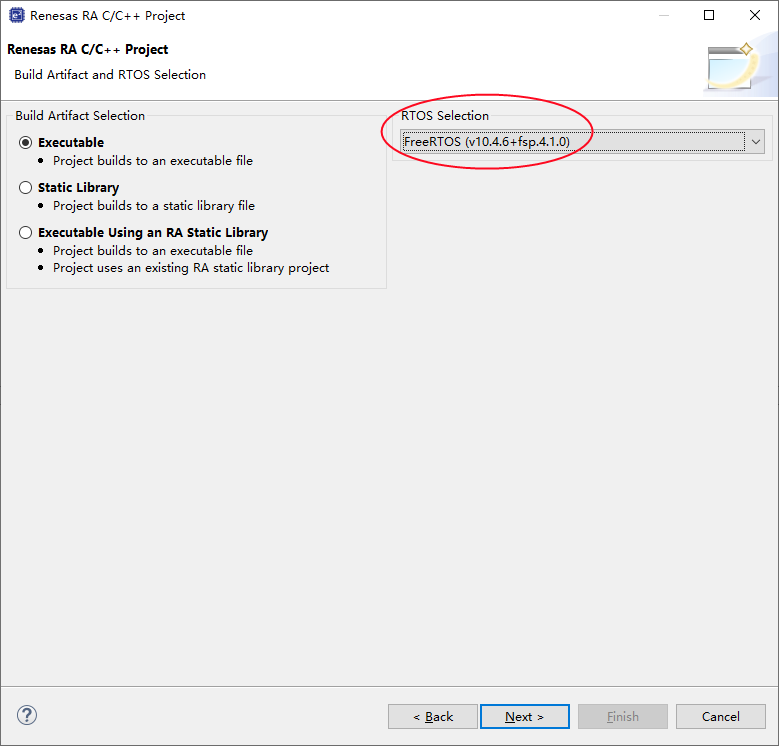
接下来的操作系统类型,选择 FreeRTOS (v10.4.6+fsp.4.1.0) 。
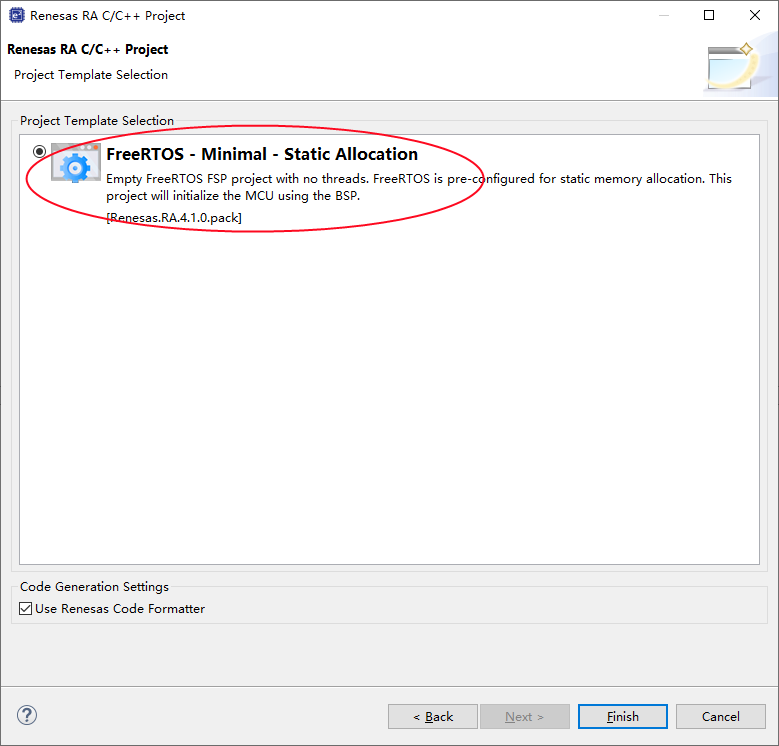
项目模板选择 Bare Metal -Minimal
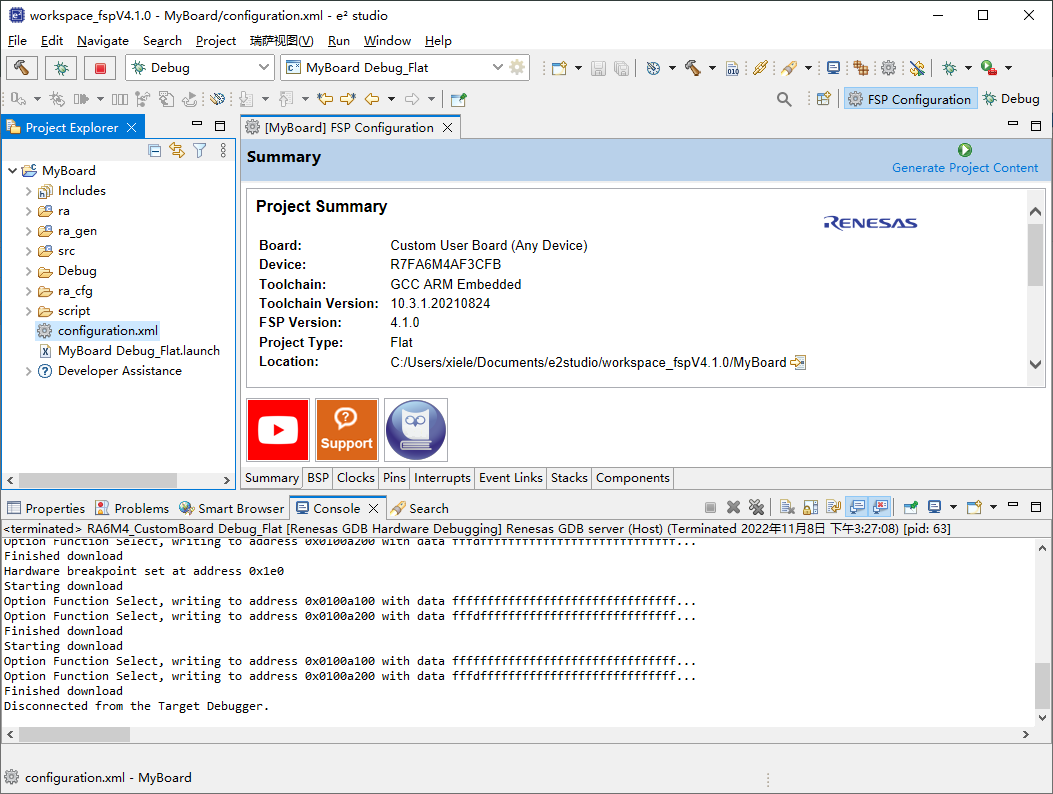
接下来,创建好的项目如下图所示。
10.2 配置Led和串口硬件
接下来我们打开项目中的FSP配置文件,配置三个Led灯的引脚为GPIO模式,并分别配置它们的别名为LedRed(P400)、LedGreen(P404)、LedBlue(P415)。
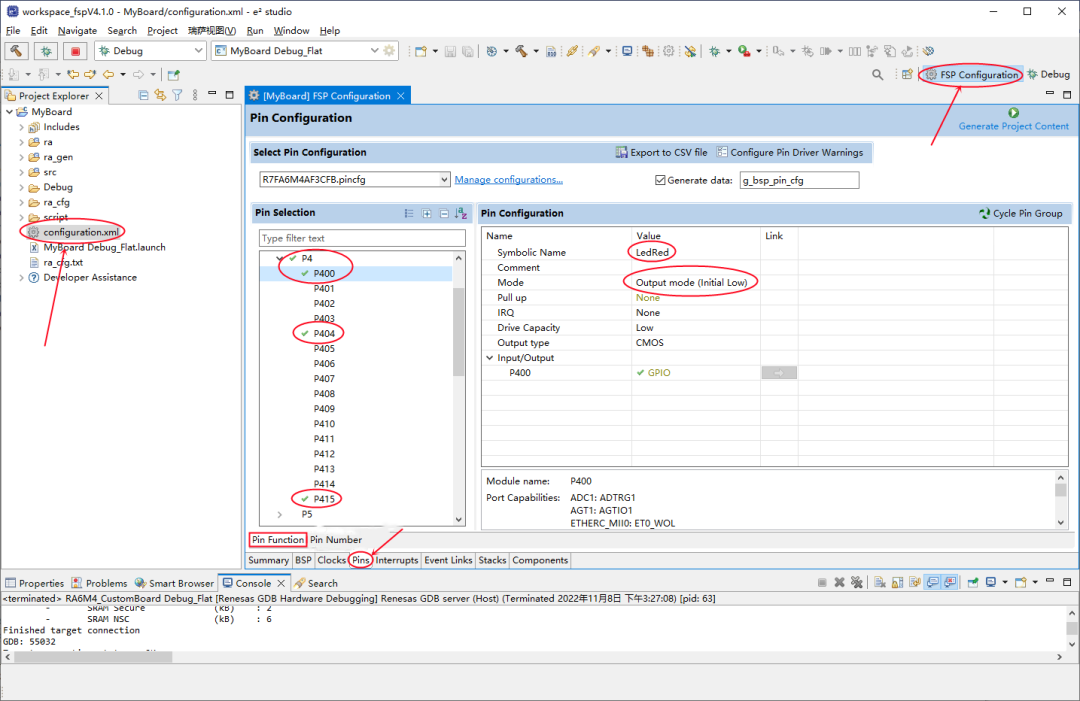
- 通过 Symbolic Name 字段可以修改该GPIO的名称为 LedRed,它将在IDE自动生成的文件 ra_cfg/fsp_cfg/bsp/bsp_pin_cfg.h 中定义;
- 通过 Mode 字段可以修改GPIO口的工作模式,它们将在IDE自动生成的文件 ra_gen/pin_data.c 中定义;
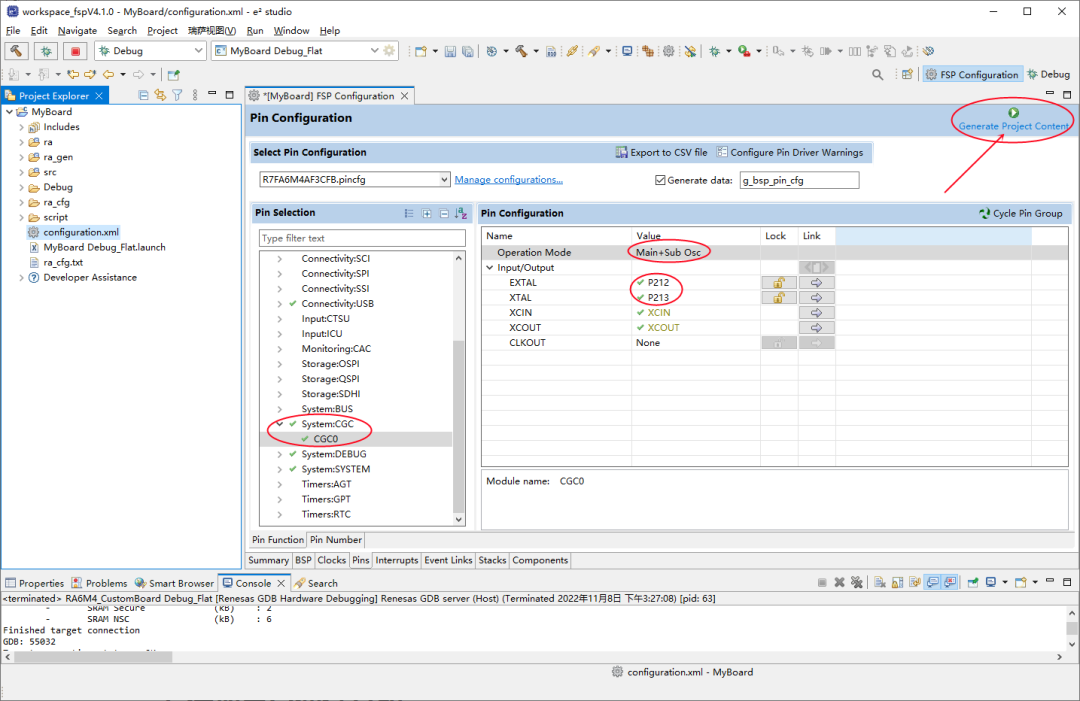
然后再配置使能外部晶振,并重新生成代码。
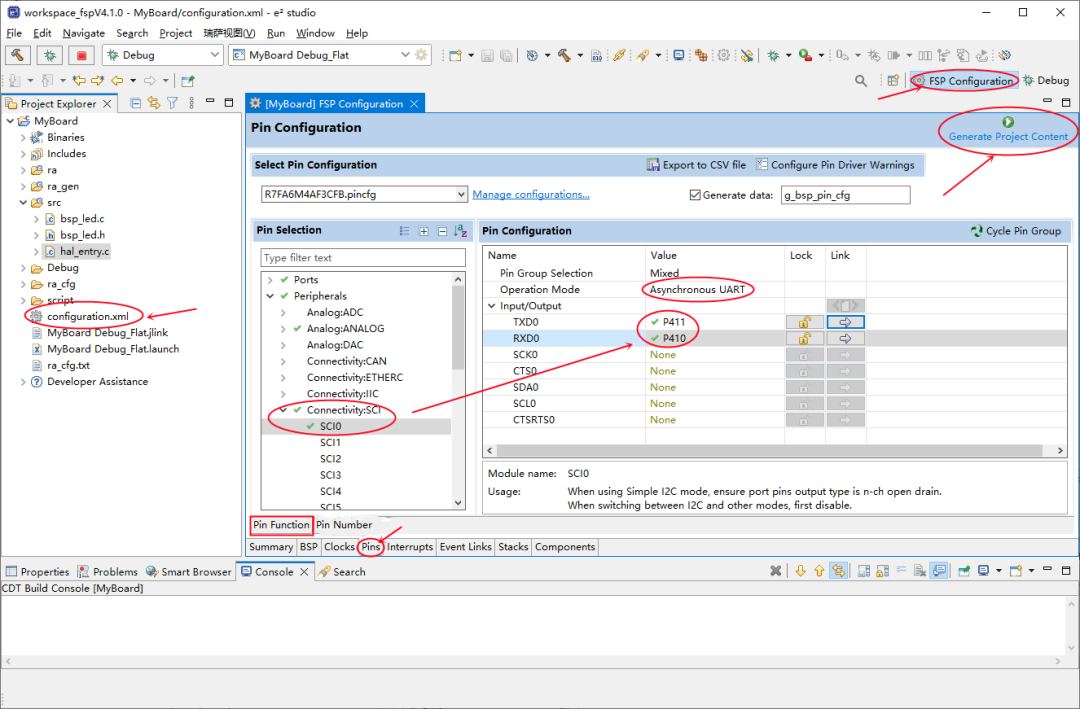
接下来我们打开项目中的FSP配置文件,配置使能相应串口的Pin功能,并重新生成代码。
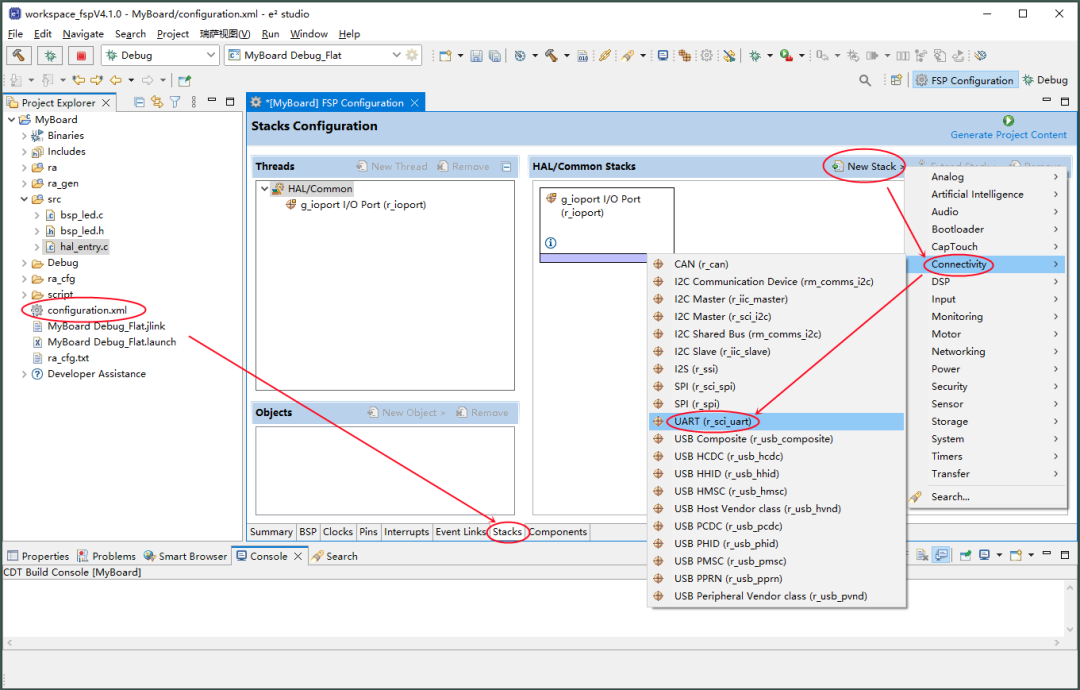
接下来我们选择 Stacks , 点击 "New Stack" -> "Connectivity" -> "UART(r_sci_uart)" 添加串口通信功能协议栈,并使用其默认配置即可。
10.3 FreeRTOS添加线程
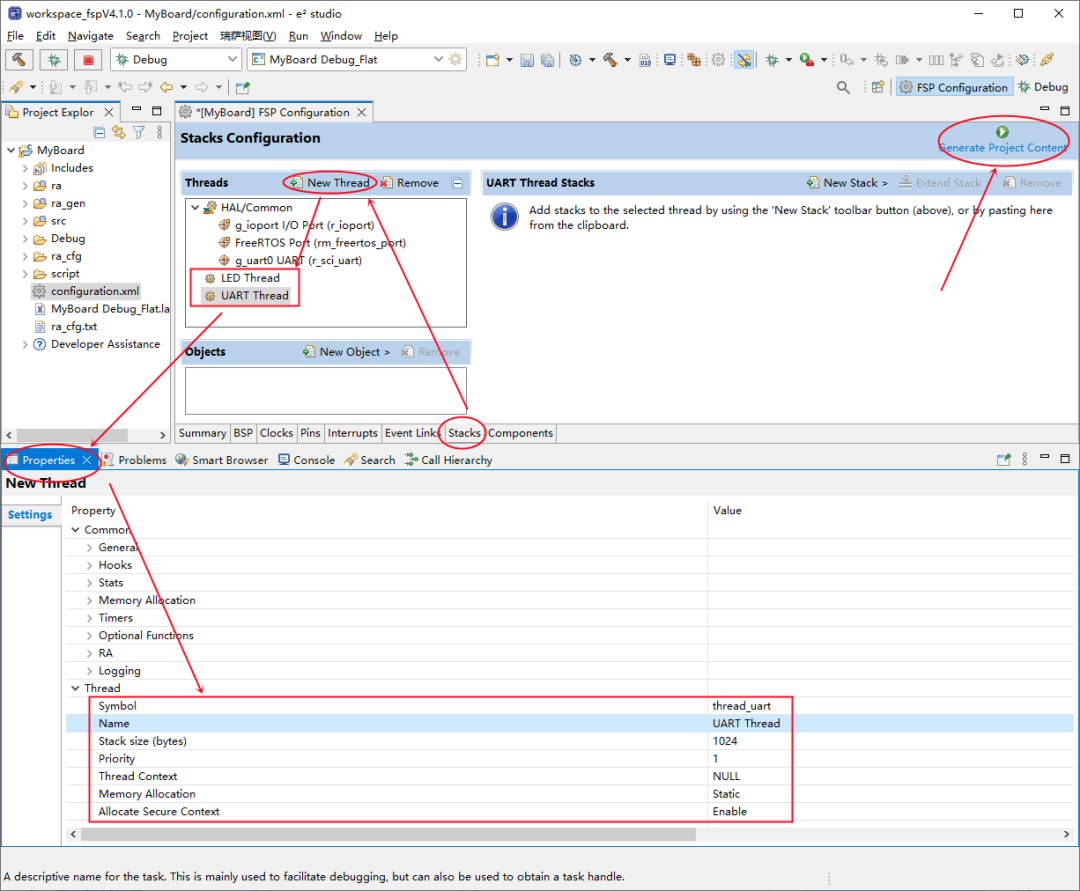
如下图所示,单击窗格顶部的 “New Thread” 按钮,添加两个线程分别命名为 thread_led 和 thread_uart ,其它的保持默认配置即可,并重新生成代码。
10.4 修改FreeRTOS源码
修改 src/thread_led_entry.c 源文件,代码如下。
#include "thread_led.h"
/* Led Thread entry function */
/* pvParameters contains TaskHandle_t */
void thread_led_entry(void *pvParameters)
{
FSP_PARAMETER_NOT_USED (pvParameters);
R_BSP_PinAccessEnable(); /* Enable access to the PFS registers. */
/* TODO: add your own code here */
while (1)
{
R_BSP_PinWrite(LedBlue, BSP_IO_LEVEL_HIGH);
vTaskDelay (300);
R_BSP_PinWrite(LedBlue, BSP_IO_LEVEL_LOW);
vTaskDelay (300);
}
}
修改 src/thread_uart_entry.c 源文件,代码如下。
#include "thread_uart.h"
#define HELLO_MSG "FreeRTOS is running on EK-RA6M4 Board!
"
/* UART Thread entry function */
/* pvParameters contains TaskHandle_t */
void thread_uart_entry(void *pvParameters)
{
FSP_PARAMETER_NOT_USED (pvParameters);
R_SCI_UART_Open(&g_uart0_ctrl, &g_uart0_cfg);
/* TODO: add your own code here */
while (1)
{
R_SCI_UART_Write(&g_uart0_ctrl, (uint8_t *)HELLO_MSG, strlen(HELLO_MSG));
vTaskDelay (1500);
}
}
10.5 编译运行FreeRTOS
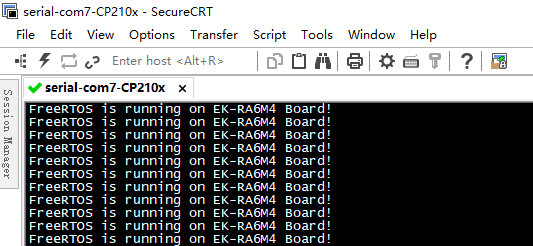
接下来编译项目源码并运行,这时候将会看待一个线程将让蓝色Led每隔600ms闪烁一次,另外一个线程则让串口每隔1.5s打印如下信息。
-
如何为S32K311或S32K310创建一个freertos演示?2023-04-25 693
-
RA FreeRTOS任务创建2023-03-10 2559
-
FreeRTOS介绍与基础任务创建2022-09-26 4774
-
【freeRTOS开发笔记】关注创建任务时传入优先级数值问题2022-07-11 3914
-
FreeRTOS创建任务的流程分享2022-02-11 875
-
FreeRTOS的任务创建过程2022-02-08 1243
-
FreeRTOS高级篇2---FreeRTOS任务创建分析2022-01-26 920
-
#FreeRTOS学习笔记(二):任务创建/删除,挂起/解挂2021-12-23 804
-
FreeRTOS笔记(四):任务创建/删除,挂起/解挂详解2021-12-04 814
-
STM32CUBE的freertos的任务创建2021-08-24 1141
-
FreeRTOS任务如何创建和删除?2021-03-11 4048
-
如何使用Visual Studio Code进行FreeRTOS开发2021-02-23 4308
-
FreeRTOS创建消息队列问题如何解决2020-07-19 2906
全部0条评论

快来发表一下你的评论吧 !
