

用于距离测量和物体检测的飞行时间系统
描述
距离测量和物体检测在许多领域都发挥着重要作用,无论是在工厂自动化、机器人应用还是物流中。特别是在安全方面,需要对特定距离的物体或人员进行检测和响应。例如,一旦工人进入其危险区域,机器人手臂可能需要立即停止。
飞行时间(ToF)为此变得越来越重要。使用ToF技术,光从调制源(例如激光)发射,然后由传感器或相机捕获从一个或多个物体反射的光束。因此,可以通过发射光和接收反射光之间的时间延迟∆来确定距离。时间延迟与相机与物体之间距离的两倍(往返)成正比。因此,距离可以估计为深度 d = (c × Δt)/2,其中 c 是光速。因此,ToF相机输出2D数据以及所需的深度信息。
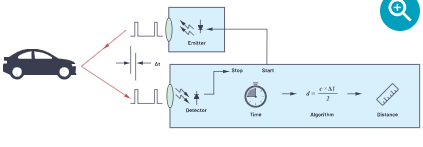
图1.飞行时间测量原理。
ToF允许一次记录整个图像。无需逐行扫描或传感器与被观察物体之间的相对运动。ToF通常被归类为LIDAR(光检测和测距),但它是基于闪存LIDAR的方法,而不是扫描LIDAR。
使用ToF测量光脉冲的飞行时间基本上有两种不同的方法:基于电荷耦合器件(CCD)技术的脉冲操作和连续波(CW)操作。
光脉冲发射和接收之间的经过时间是在脉冲模式下测量的,而发射和接收调制光脉冲之间的相移是在CW模式下确定的。两种操作模式都有优点和缺点。脉冲模式对环境光更鲁棒,因此更适合户外应用,因为该技术通常依赖于在短积分窗口内以非常短的脉冲发射的高能光脉冲。而CW模式可能更容易实现,因为光源不必非常短,具有快速上升/下降沿。但是,如果精度要求变得更加严格,则需要更高频率的调制信号,并且可能难以实现。
现有的像素尺寸可实现高芯片分辨率,不仅可以进行距离测量,还可以实现物体和手势识别。要测量的距离范围从几厘米(<10厘米)到几米(<15米)。
不幸的是,并非所有物体都能被检测到相同的程度。物体的条件、反射率和速度会影响测量结果。测量结果也可能被雾或强烈阳光等环境因素所伪造。环境光抑制有助于后者。
ADI公司(ADI)等半导体制造商提供完整的3D ToF系统,以支持3D ToF解决方案的快速实施。它们将数据处理、激光驱动器、电源管理和软件/固件集成到一个用于控制电子设备的单元中。其他组件包括发射调频光信号的发射器和记录反射信号的检测器。框图如图2所示。

图2.ToF系统框图。
具有集成深度计算的模拟前端(AFE)等组件对想要构建此类系统的任何人来说都有很大的帮助。其中,ADDI9036提供此功能。它是一款完整的 CCD ToF 信号处理器,具有集成半导体激光管驱动器、12 位 ADC 和高精度时钟发生器,可为 CCD 和激光器生成时序。ADDI9036负责处理来自VGA CCD传感器的原始图像数据,以产生深度/像素数据。
ADI还与设计合作伙伴合作,共同提供成品模块和开发平台。这些评估系统可用于开发客户特定的算法。完成的模块和平台有助于加速开发,这在工业和汽车工程等时间关键型业务领域尤为重要。
-
安森美推出首款飞行时间传感器HyperluxID系列2025-03-12 1547
-
飞行时间传感器:技术原理与多元应用2024-02-19 2027
-
硅光电倍增管用于直接飞行时间测距应用(一):直接ToF测距系统的设计2023-12-07 1547
-
贸泽开售TDK InvenSense ICU-20201飞行时间距离传感器2023-11-14 1147
-
哪个模块最适合从距离传感器模块飞行时间 (ToF) 测距传感器测量准确距离?2022-12-28 935
-
用于距离测量和物体检测的飞行时间系统2022-11-22 1383
-
3D飞行时间技术在深度测量和物体检测领域中发挥着重要作用2021-11-09 3137
-
用于距离测量和目标检测的飞行时间系统2021-10-29 3733
-
飞行时间传感器如何工作,使用飞行时间传感器的好处2020-11-03 2881
-
飞行时间传感器的距离确定方法2020-04-12 5308
-
Adafruit VL53L0X飞行时间距离传感器的使用2019-11-28 14840
-
Voxel 3D 飞行时间传感器机器人视觉参考设计2018-10-11 3095
-
开源硬件-TIDA-00663-雷达脉冲飞行时间 PCB layout 设计2016-02-25 1074
全部0条评论

快来发表一下你的评论吧 !
