

10分钟掌握EV1527无线模块编解码
描述
《《《《《正文》》》》》
《无线模块选择》

说明:
一、上图这种常规的 433Mhz 无线模块,发射端一般用 PT2262/EV1527/PT2240/HCS301编码。如果选择 PT2262,接收端则直接搭配 2272,匹配好振荡电阻和烙好 A0-A7 脚就可以直接使用了。
二、如果发射用 EV1527、PT2240、HCS301 等芯片,这些需要自已编写解码程序,单片机解码,要不断地处理 100us-20ms 脉冲识别,还要做别的任务,比如按键 LED 数码扫描等。
三、如果单片机的任务单一,可以用在 main 中循环查询端口的方式来不断地判断脉冲宽度,一般工程师都是用这种方式入手的,这种方式仅限 EMC153 这类低档 MCU,如果是 51或 ST 不推荐,原因是单片机还是有其它任务,这些耗时较长,会直接造成无线接收的丢码,这种解码方式仅限入门用。
四、推荐解码方法是一个中断引脚加一个定时器,在中断里完成这部分的无线解码;虽然模块在静态时,有 30us—1000us 不等杂波,占用 MCU 太多的时间,这完全可以忽视;写好中断代码就好了,中断以外的时间处理其它任务完全没有问题。比如串口收发,SPI通讯等。处理串口中断,和其它定时中断也基本不影响,如果串口波特率较高,实测有误码时,可以将串口中断的优先级别高于无线接收。
《具体解码方法》
一般选择单片机具有上升沿/下降沿,双边沿中断的引脚来直接连接无线接收模块(老式 51 单片机仅有下降沿方式,后面讲此改进方法),注意不要灌电给接收模块,就是单片机 5V,模块选 3V 的,这样会改变接收模块的电压,应作处理,一般此脚设为上拉输入,但更建议将引脚设为高阻输入,这样减小接收模块的负载,有利其减小电压纹波。
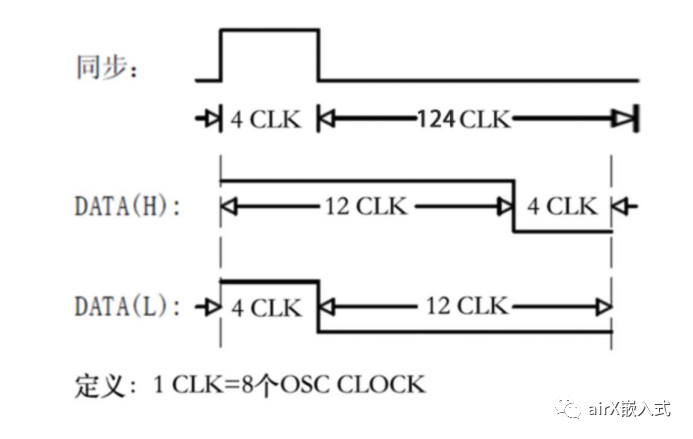
如何解码?我们选观察下以下编码图,以 1527 编码为例说明:

上面图中间部分是一帧完整的数据,最有特征的就是最宽的部分,俗称同步脉冲,两个同步脉冲间的小脉冲是我们要解的编码。两个同步头间的高电平是 25bit,其中最后 1bit 是下一同步头的。我们只解其中的 24bit 即可。
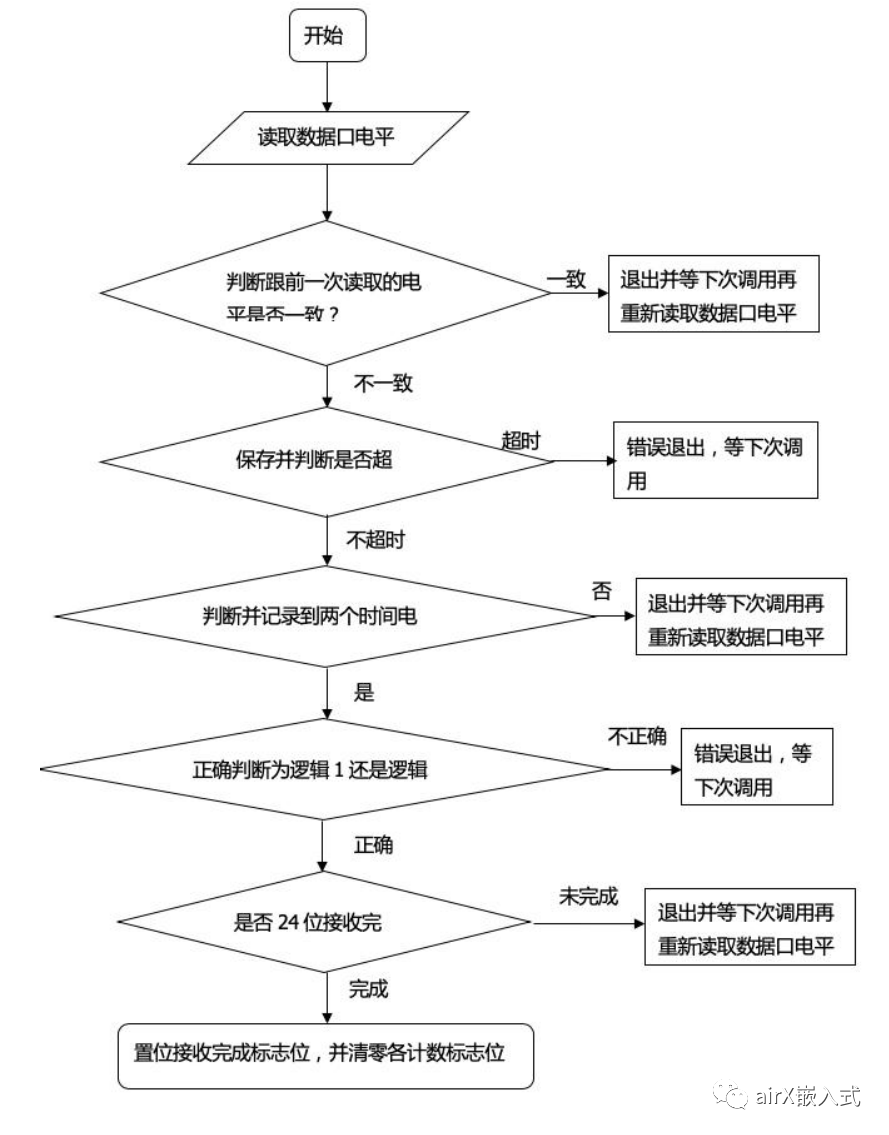
HCS301 的编码只需接收一次就行了,它一包 64bit 位中自带校验码,不需要我们这种重复两次的方法来校验。Chkbuf 中的数据最好也加个时间限制,超时后,校验位为清 0,下次最收到码时,又成为了第一包数据了。数据收到后,交由主程序中查询去处理,有可能还要有 E2 中的数据再次比较,证明是否有无对码等的操作。
请参见下面的流程图:

《EV1527 编码芯片之无线解码原理说明》
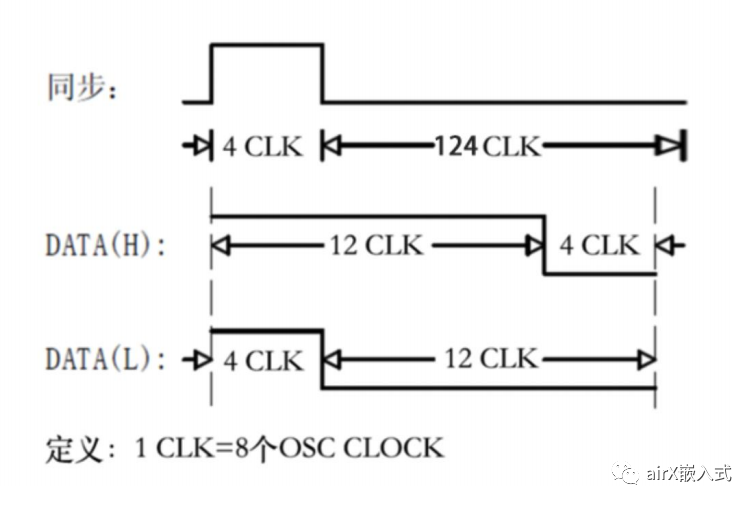
EV1527 是一片由 CMOS 设计制造的可预烧内码的学习码编码 IC,由软件解码,每次发4 帧,每帧 24 位加一个同步码。此 24 位中,前 20 位为芯片内码(即 ID,共有 2 的 20 次方,即 1048576 组组合,大大降低使用上编码重复的几率),后 4 位是按键值(即数据)。
其编码图形如下所示:
extern unsigned char timer_4_count;
extern unsigned char timer_4_countover;
unsigned char in_bit = 0;
unsigned char rx_start = 0;
unsigned char rx_data_ok = 0;
unsigned char recvbit[4];
unsigned char recvbitcount = 0;
unsigned char recvbyte[40];
unsigned char recvbytecount = 0;
unsigned char Recv_data[5];
unsigned char in_bit_n = 0;
///////////////////接收函数///////////////////////
void Recieve()
{
//一进来就先把引脚的状态读取了,然后判断跟前面的是否一样,不一样的时候才进行后
续运算
in_bit_n = inport; //inport 是 ASK 模块的数据脚
if(in_bit == in_bit_n)
{
return;
}
in_bit = in_bit_n;
//P3_7 = in_bit; //把值丢给 LED 口
if(timer_4_countover)
{//超时错误
RecieveError();
return;
}
// 接收 4 次电平变化,才能确定 1 bit
if((timer_4_count > min_time_l)&&(timer_4_count < max_time_l))
{//窄脉冲,4~14,就是 200us~700us
if(in_bit) //高电平,现在为高电平,其实之前是低电平的
{
recvbit[recvbitcount] = 0x00; //低短
}
else//低电平
{
recvbit[recvbitcount] = 0x01; //高短
}
}
else if((timer_4_count > min_time_h)&&(timer_4_count < max_time_h))
{//宽脉冲,16~60,就是 800us~3000us
if(in_bit)
{
recvbit[recvbitcount] = 0x02; //低长
}
else
{
recvbit[recvbitcount] = 0x03; //高长
}
}
else
{//出错
RecieveError();
return;
}
timer_4_count = 0;
timer_4_countover = 0;
// 1527
recvbitcount++;
if(recvbitcount < 2)
{
return;
}
else
{
//这里判断的电平,应该是跟实际的相反的,因为只有电平变化了,才会做相应处理,
不变化的话是直接退出的。
if((recvbit[0] == 1)&&(recvbit[1] == 2)) //高短低长
{
recvbyte[recvbytecount] = 0;
}
else if((recvbit[0] == 3)&&(recvbit[1] == 0)) //高长低短
{
recvbyte[recvbytecount] = 1;
}
else
{
RecieveError();
return;
}
}
recvbytecount++; //接收到的字节数加 1。
recvbitcount = 0; //
if(recvbytecount < RECV_BIT_NUMBER)
{// 未接收完
return;
}
recvbytecount = 0;
timer_4_count = 0;
rx_data_ok = 1;
}
50us 定时器中断函数:
unsigned long Timer4Count = 0;
unsigned char timer_4_count = 0;
unsigned char timer_4_countover = 0;
{
static unsigned char tt4=0;
//PA_ODR_ODR2=~PA_ODR_ODR2;
tt4++;
if(tt4>=20)
{//1ms
tt4=0;
Timer4Count++;
//PA_ODR_ODR3=~PA_ODR_ODR3;
}
timer_4_count++;
if(timer_4_count == 0)
timer_4_countover++;
TIM4_SR_UIF=0;
}
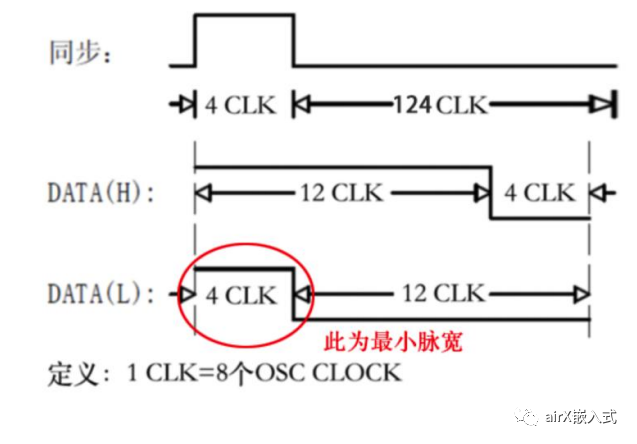
程序功能:使用前需要对码,即按一下按键后松开,4 个 LED 全亮后熄灭只留 LED2,LED3 常亮,5s 钟内按下遥控器,可以发现 LED 分两组闪烁三次后熄灭即可完成对码。 以后该遥控器就可以工作。接收端收到无线信号后,先输出串口,然后判断 ID,ok 后点亮对应的 LED,100ms 后熄灭。若想解其他最小脉宽的编码,只需修改程序中的如下四个变量即可:
注:所谓“最小脉宽”即 EV1527 的编码中四倍时钟,如下图所示:
审核编辑:汤梓红
-
 lovemelovemycat
2024-12-09
0 回复 举报不需要检测同步码码 收起回复
lovemelovemycat
2024-12-09
0 回复 举报不需要检测同步码码 收起回复
-
用远-R1接收模块解码EV1527的C代码2022-12-12 7732
-
如何解决ev1527信号频率的问题?2022-02-28 2139
-
SYN480R模块解码EV1527该怎样去使用呢2022-01-12 5605
-
基于51单片机的无线遥控编码程序EV15272021-07-30 4133
-
基于STM32和hs1527、ev1527、rt1527、fp1527的无线接收解码程序2020-07-18 2812
-
请问单片机解码433MHZ EV1527学习型编码ic 学习功能如何用程序实现?2019-09-09 6141
-
Ev1527的pic单片机软件接收解码程序2018-02-27 2815
-
基于EV1527编码芯片的应用及其解码方法2017-10-31 29942
-
ev1527,pt2262,upd6122等编解码2016-10-13 2661
-
EV1527解码资料2016-05-13 6172
-
想找一个芯片方案,无线发码专用集成电路,类似于EV1527,但要求是免调试的。希望知道的推荐下。2016-04-18 7086
-
无线编码IC EV1527怎么预烧内码?2013-06-29 20350
-
eV1527学习码编码IC2011-07-11 6531
全部0条评论

快来发表一下你的评论吧 !
