

什么是齿轮修形?
电子说
描述
齿轮修形可以极大地提高传动精度,并增加齿轮强度。广义上的齿轮修形有许多类别(齿端修形、齿顶修形、齿根修形、变位、修改压力角),本文将分享答主在精密传动设计中,关于齿轮修形的心得。
(以下将『输出扭矩波动率小』作为『传动精度高』的唯一指标)
1. 齿『端』修形(齿向修形)
齿『端』修形是最常见(最容易加工)的修形方式,通常是为了帮助装配,和机械设计中多数倒角的作用是一样的,但其实对传动精度和齿轮强度都有影响(这部分内容很多,答主会写在之后的回答中)。
2. 齿『顶』修形(齿顶高系数)
齿『顶』修形是所有修形方式中,对传动精度影响(提高)最大的。 我们希望齿轮啮合线是这的形状:
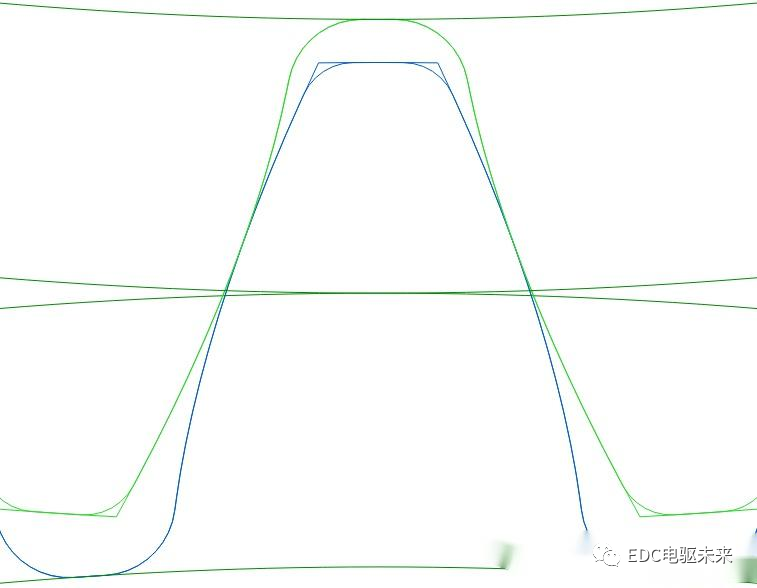
红色是啮合线(理想的)
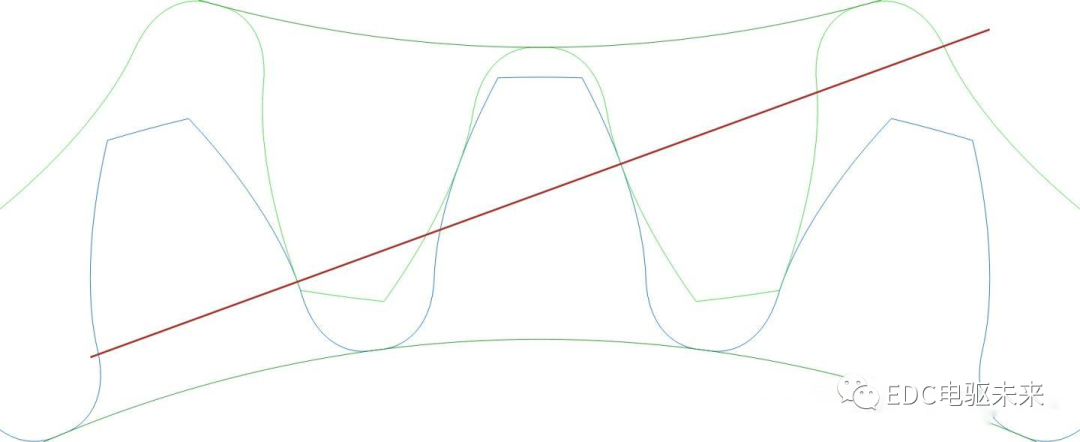
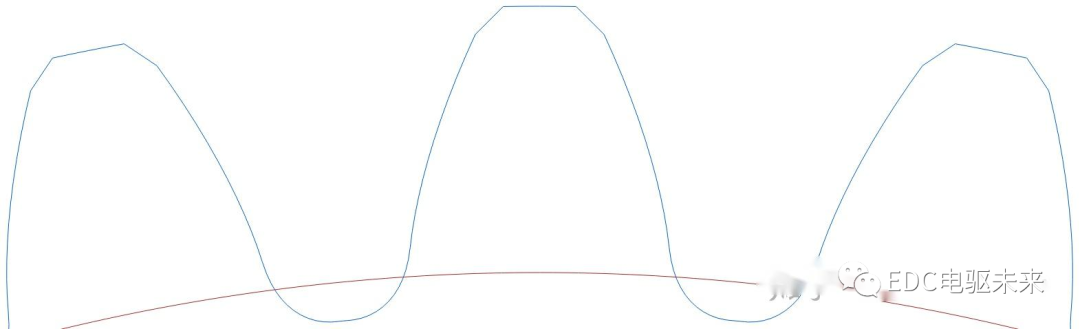
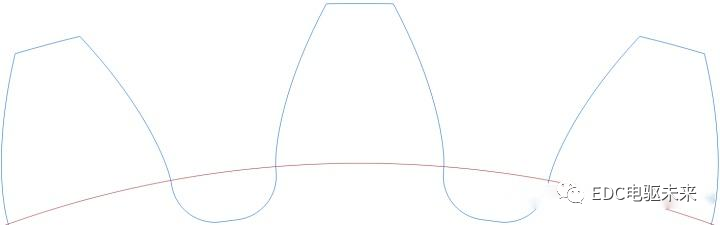
但其实是这样的:
红色是啮合线(实际的),啮合线只有一部分是“正确”的。
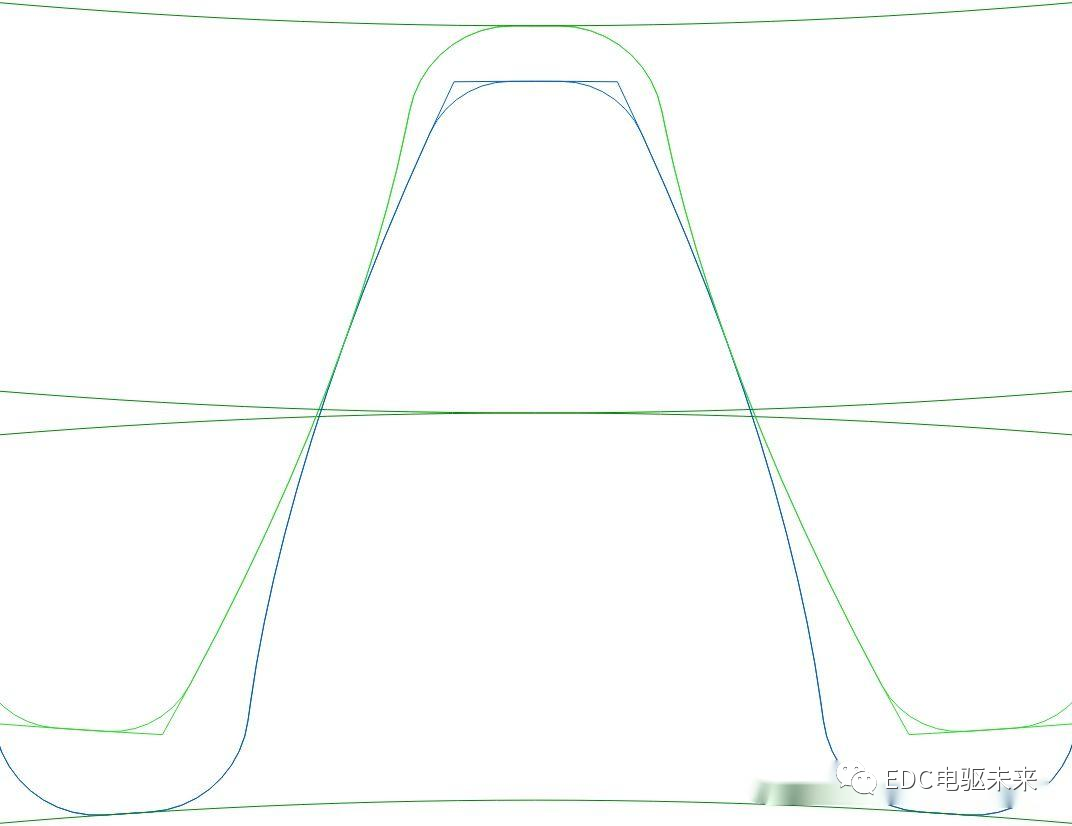
因为标准齿形中,齿顶被“削”去了一部分,所以渐开线是不完整的,导致主齿轮的齿顶和副齿轮的齿面(从截面上看)是先由点-线接触,再过渡到线-线接触:
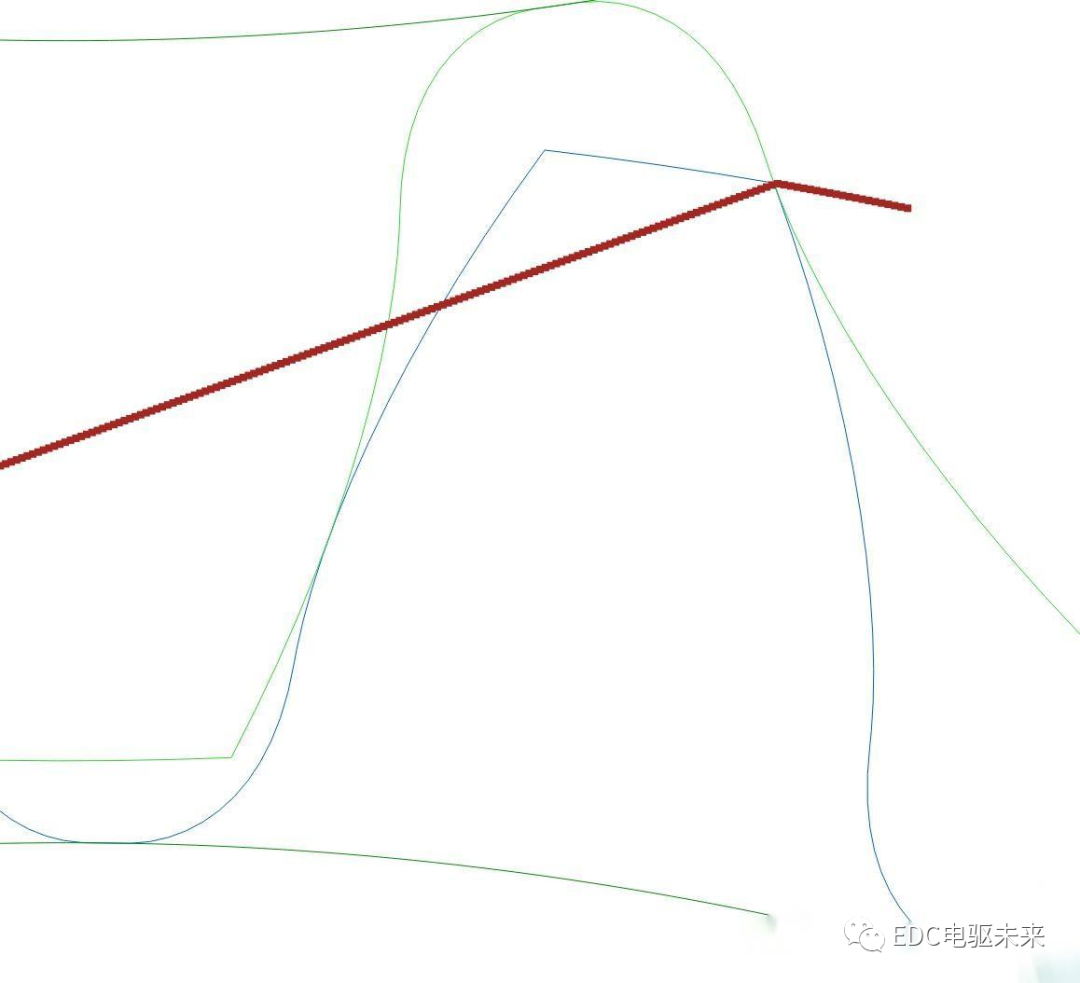
上图的放大版
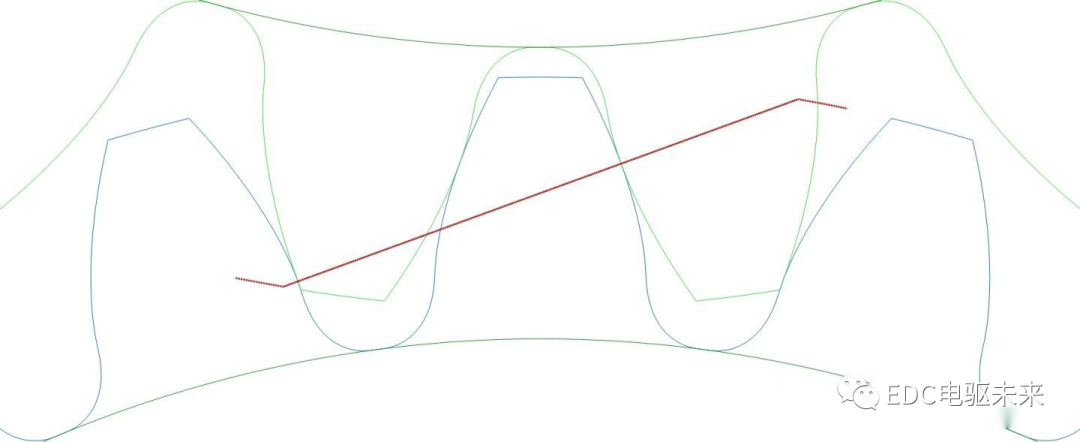
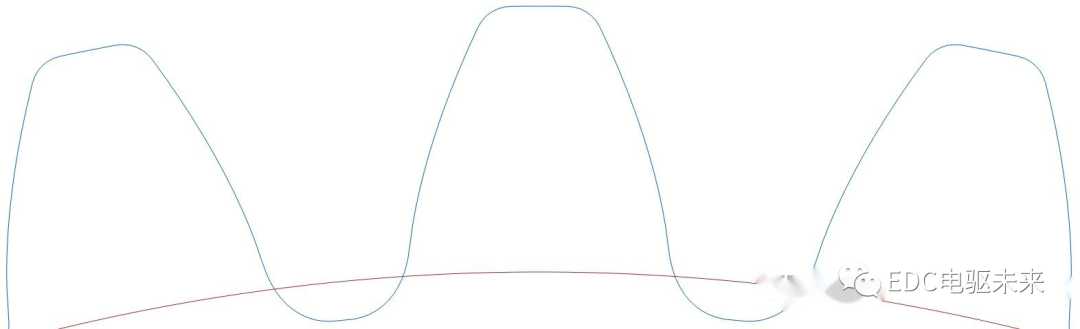
如果齿顶少“削”一点(齿顶高系数从 1 提高至 1.3,相应地,齿根高系数从 1.25 提高至 1.4),渐开线会变得更完整,啮合线也变得从 1.25 提高至 1.4、),渐开线会变得更完整,啮合线也变得更接近理想的形状:

啮合线“正确部分”变长了、“不正确部分”变短了。
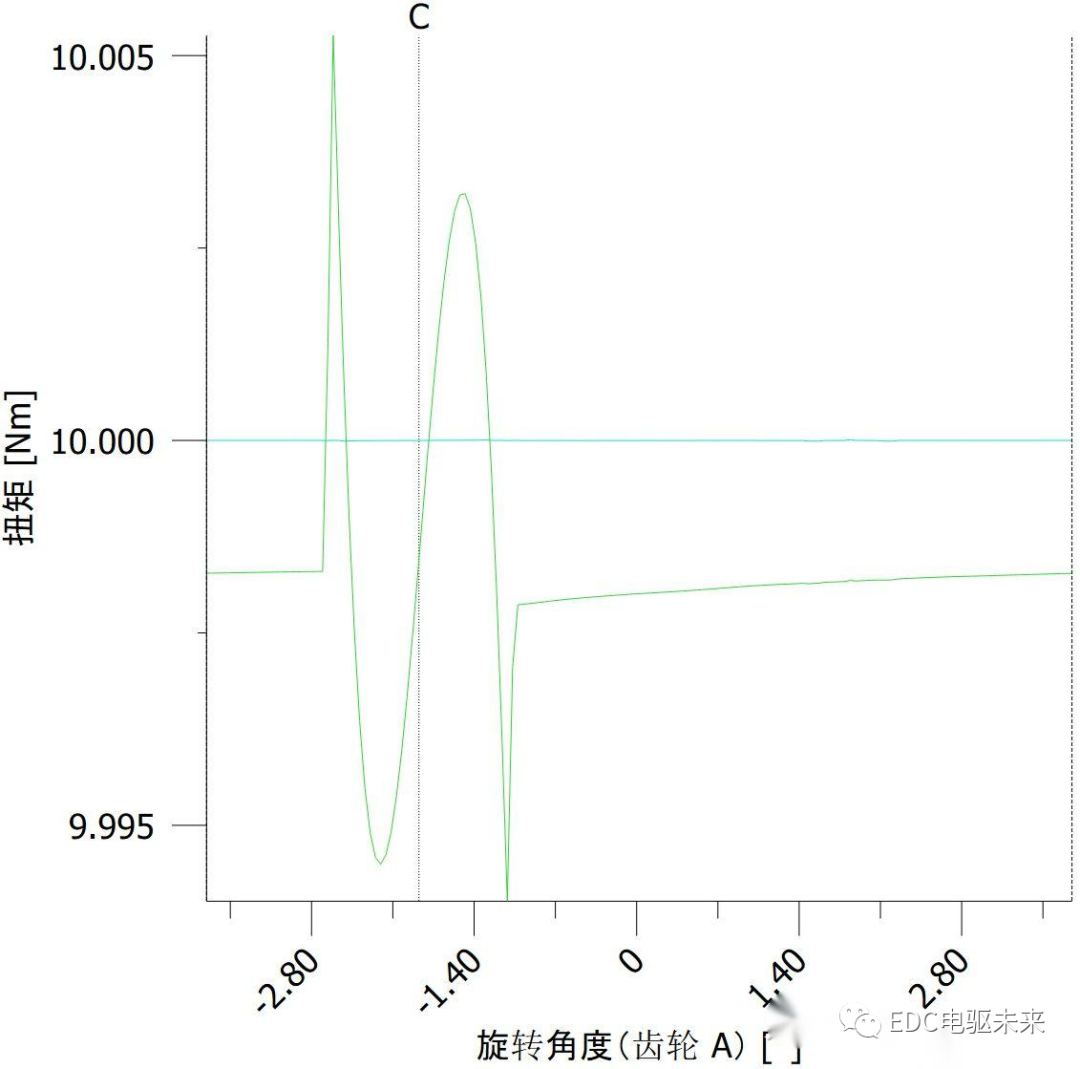
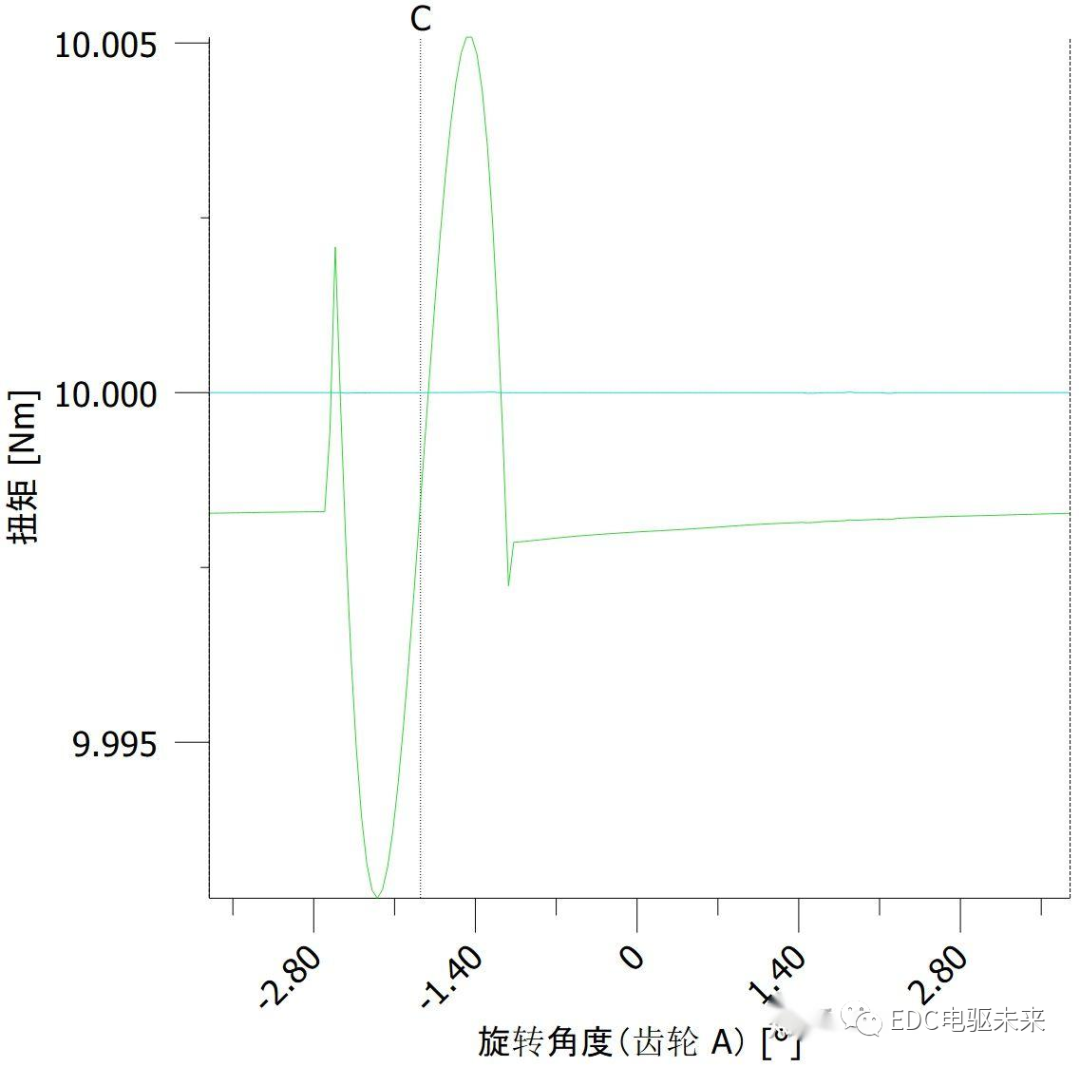
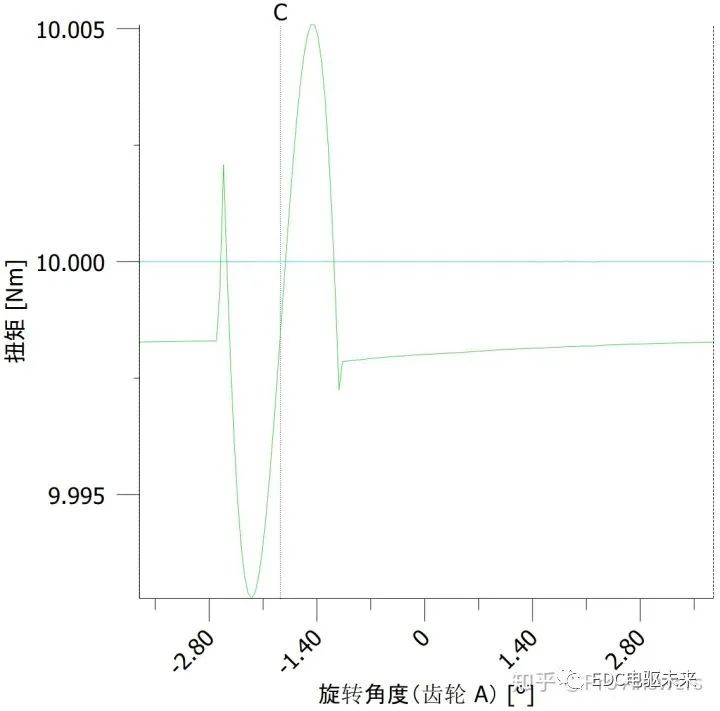
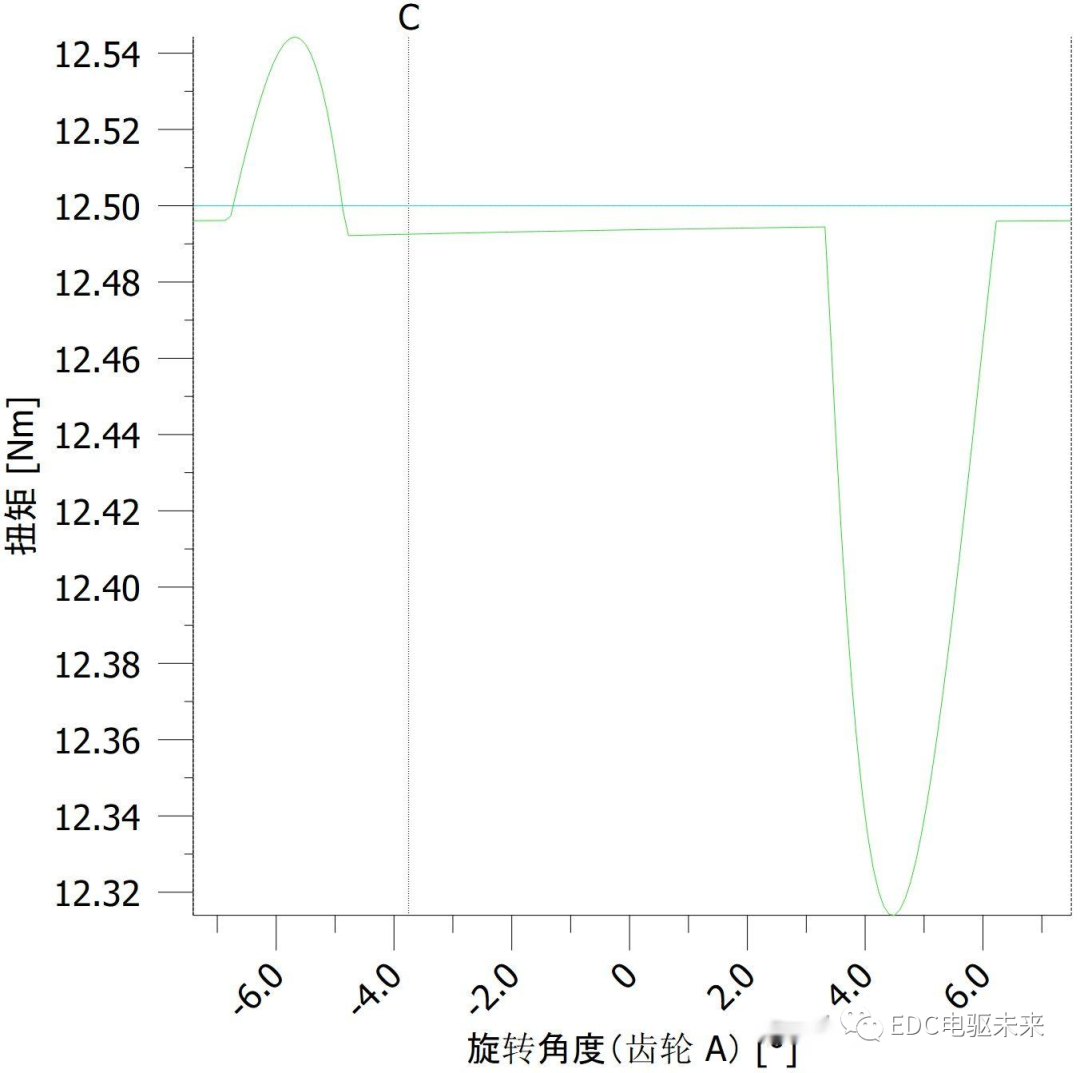
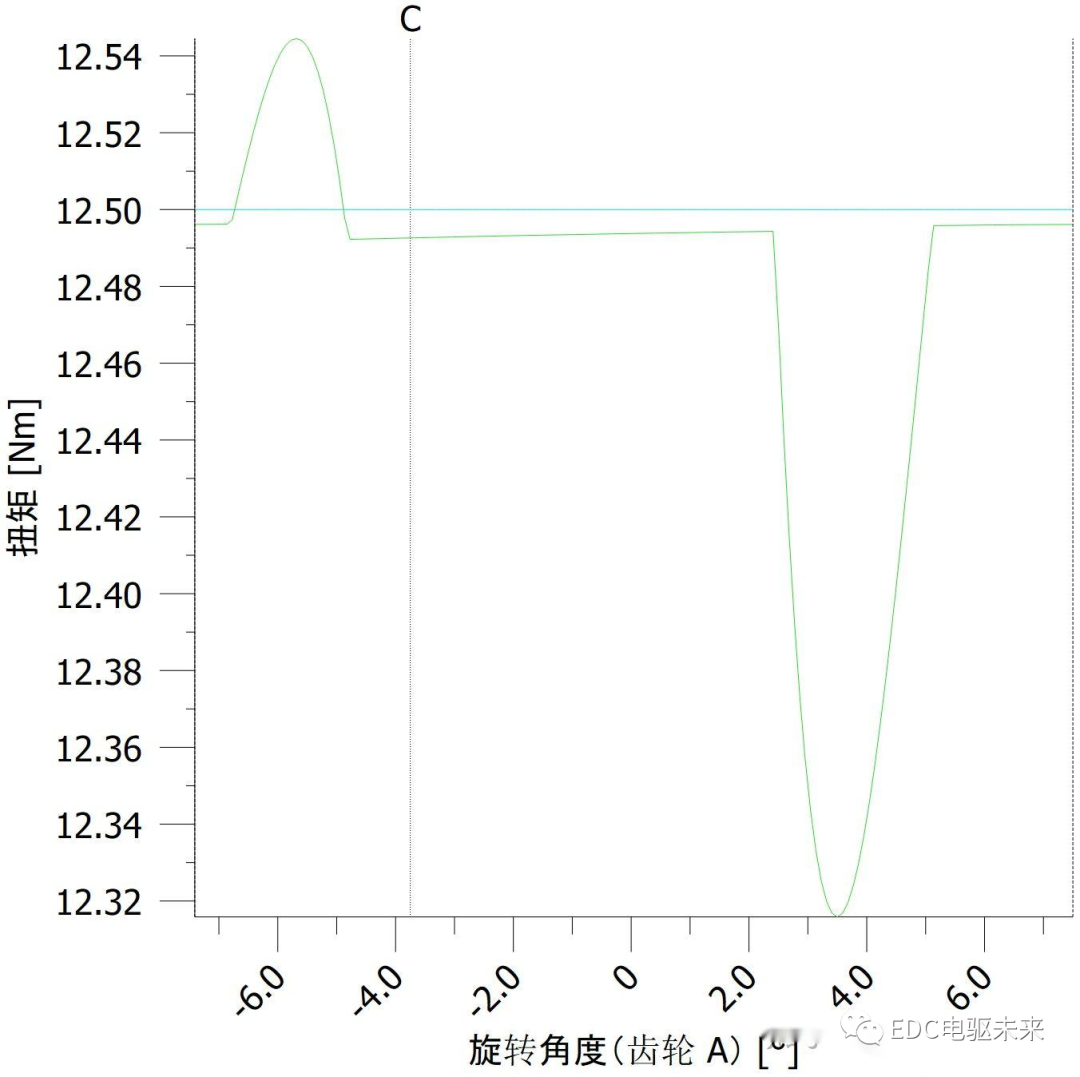
但并不是“削”得越少,传动精度越高,因为齿顶的材料厚度小、应变大,因此在啮合的过程中,渐开线越靠近齿根的部分,啮合精度越高;渐开线越靠近齿顶的部分,啮合精度越低。不同场景中(主要影响因素是额定扭矩、齿轮模数、齿数、压力角),传动精度最高的齿顶高系数是不同的。 齿轮副参数:基于 ISO 53:1998轮廓A 齿形、1 模 24 齿、20 度压力角、厚度 7 mm、10 Nm 输入扭矩、4775 RPM 输入转速、5 kW 输入功率、齿根高系数 1.4、无变位、无其他修形、中心矩公差为 0、齿厚公差/背隙/齿距误差为 0、无摩擦。此时扭矩波动仅受材料模量和齿形影响。若齿顶高系数 为 1,输出扭矩曲线:
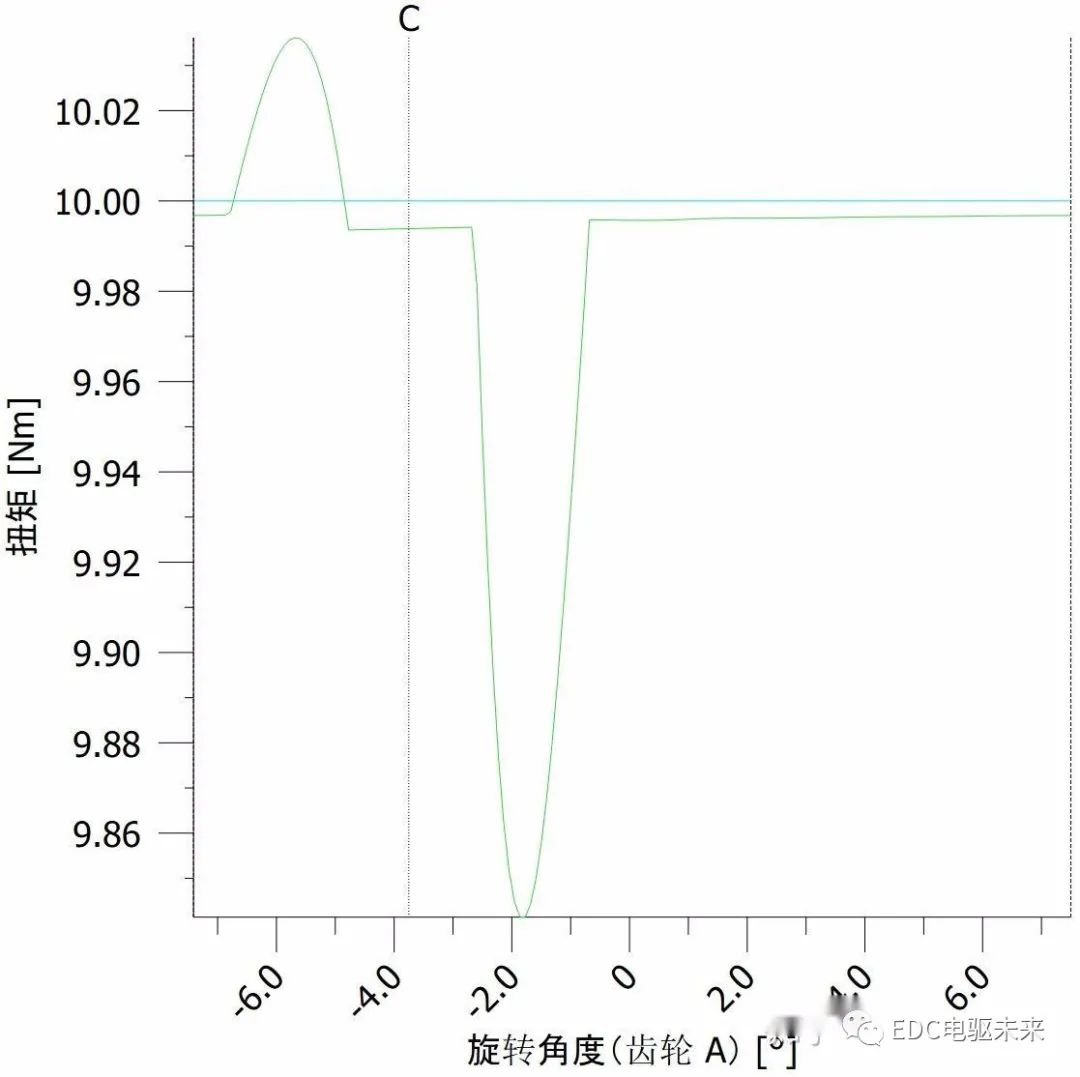
扭矩波动范围为(+0.03,-0.15),波峰在 C 点左侧、波谷在 C 点右侧。
若齿顶高系数 为 1.2:
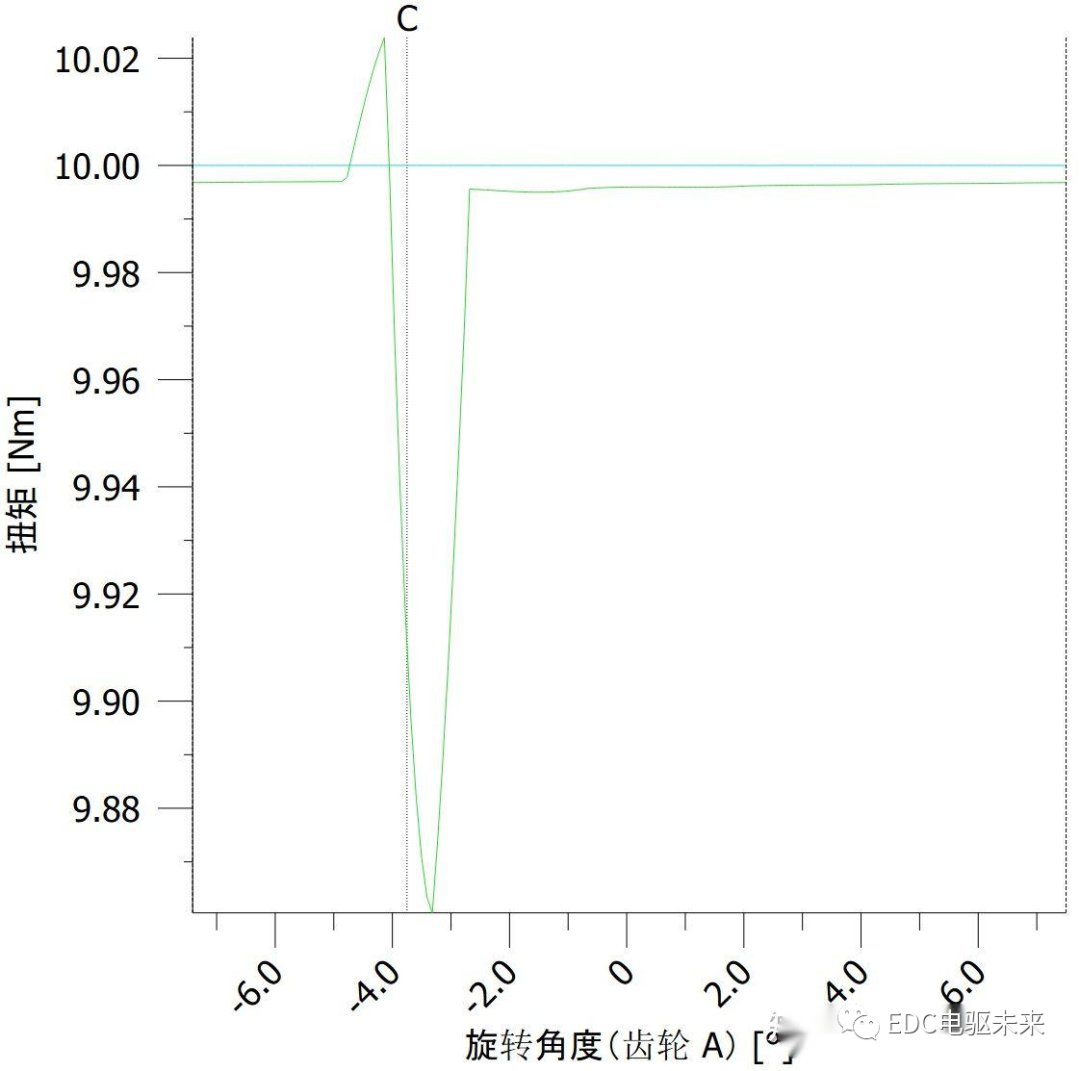
扭矩波动范围为(+0.02,-0.12),波峰在 C 点左侧、波谷在 C 点右侧。
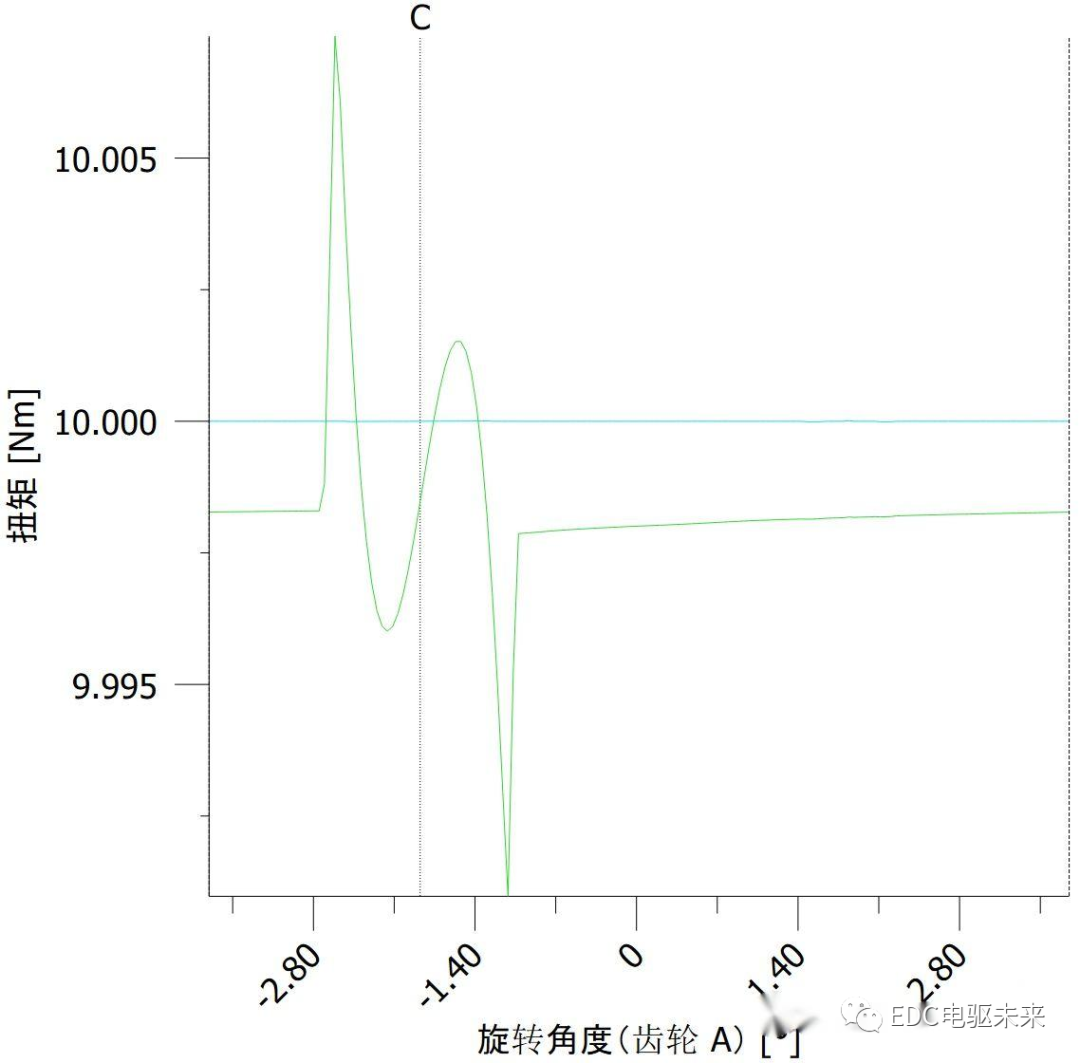
若齿顶高系数 为 1.4:
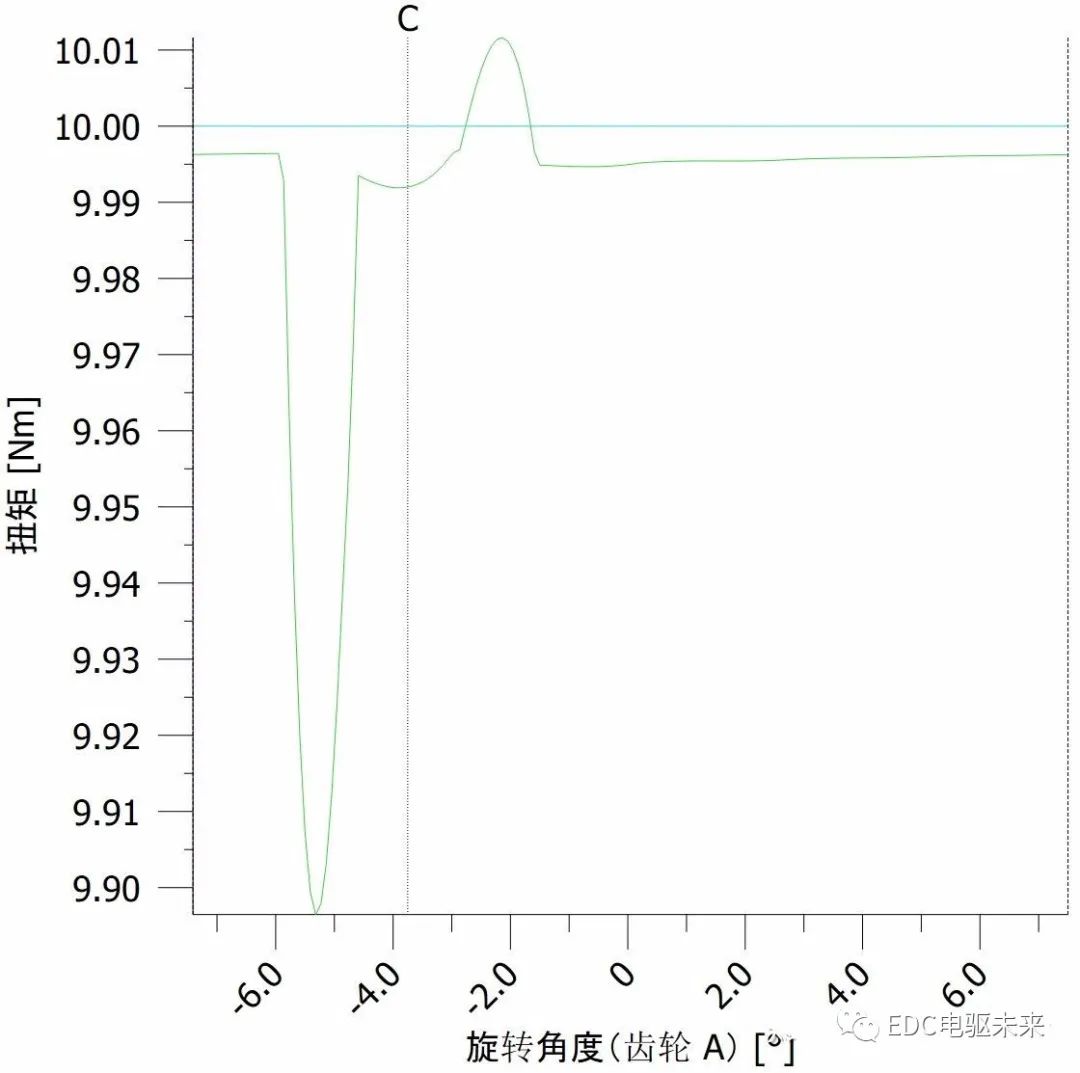
输出扭矩波动范围为(+0.01,-0.1),波谷在 C 点左侧、波峰在 C 点右侧。
这个例子是(容许范围内)齿顶高系数越大、传动精度越高。 文中提到的0.5 模 48 齿,(例子中的设定下)传动精度最高的齿顶高系数是 1。齿顶高系数是非常『难搞』的一个参数,调节它时应当如履薄冰、慎小谨微,多一丝则因齿顶应变而导致精度下降、少一丝则因啮合线“正确”部分过短而导致精度下降。通过增减齿顶高系数,还可以改变输出扭矩曲线波峰和波谷的位置,上例中,齿顶高系数小于大约 1.3 时,波峰在 C 点左、波谷在 C 点右;大于大约 1.3 时,波谷在 C 点左、波峰在C 点右(C 点为零滑动点)。这个特性可以被用来进一步提高传动精度。 上文中输出扭矩曲线没有计算摩擦力。摩擦系数 0.1,齿顶高系数为 1.3 时,摩擦力导致的扭矩损耗曲线:
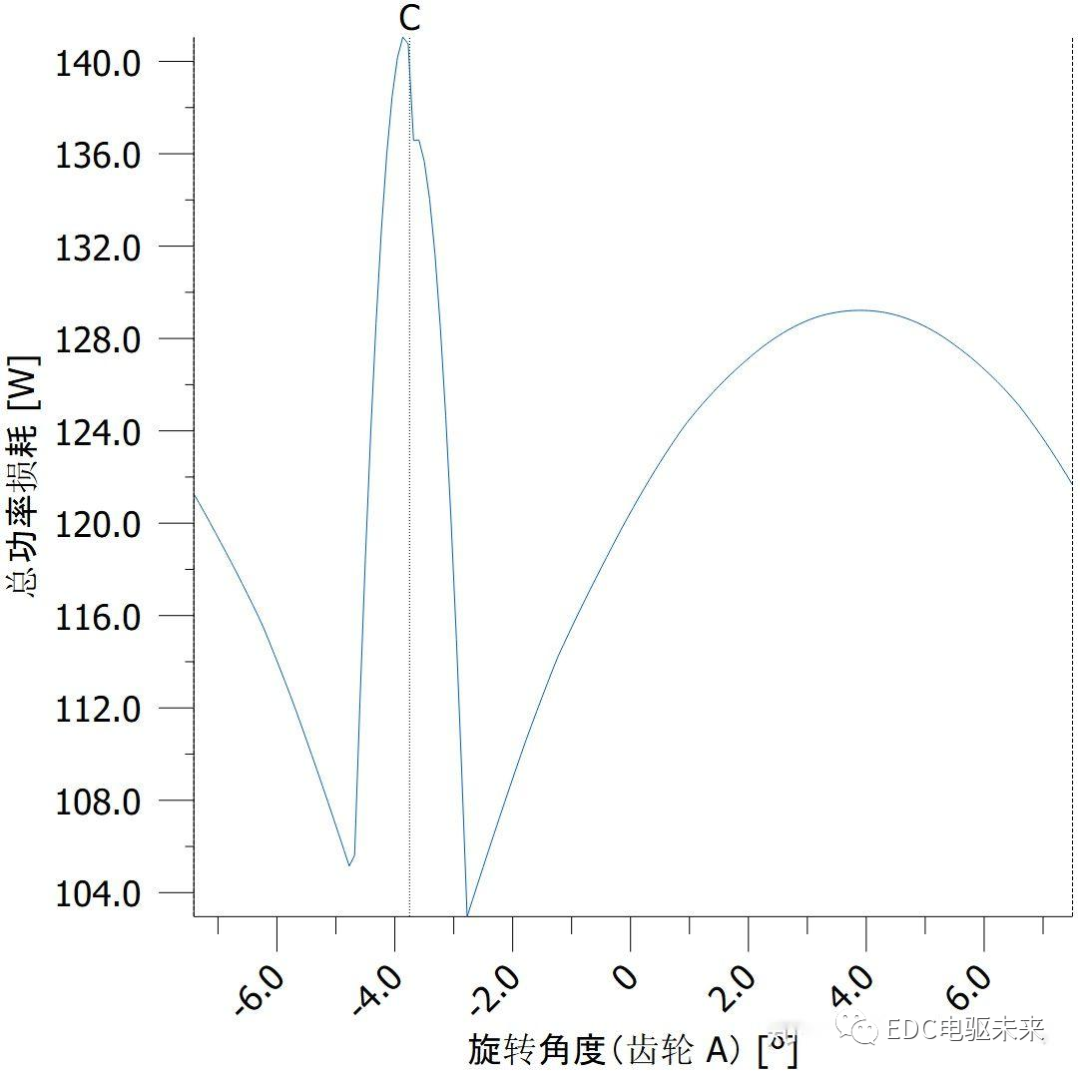
C 点处有一个波峰、C 点左右各有一个波谷,W 形曲线。
这个曲线的形状受很多因素(模数、压力角、齿顶高度...)影响,上图是一个比较典型的形状(W 形曲线,此外还有 V 形曲线比较常见,W 形的传动精度远高于 V 形)。
可以通过对齿顶高系数非常细微地调整,使得无摩擦时的扭矩输出曲线的波峰在 C 点处,让材料模量和齿形导致的扭矩波动,与摩擦力导致的扭矩波动,部分地相互抵消,更进一步提高传动精度(但这个方法并不总是管用)。齿数偏少时(例如 1模 24 齿)不容易调到理想的结果,这也是精密传动偏爱小模数、高齿数的原因之一。
3. 齿『顶』修形(齿顶倒角/倒圆)
因为机加工误差(毛刺、崩边...),以及齿轮啮合时是先“点-线接触”,齿顶角很容易损坏,因此需要设计倒角/倒圆。倒角是最简单(最容易加工)的方式,但对传动精度只有负面作用(会减少啮合线“正确”部分的长度):
0.15 mm、45 度倒角。
倒圆是最优的方式,甚至能极大地提高传动精度:
0.2 mm 倒圆
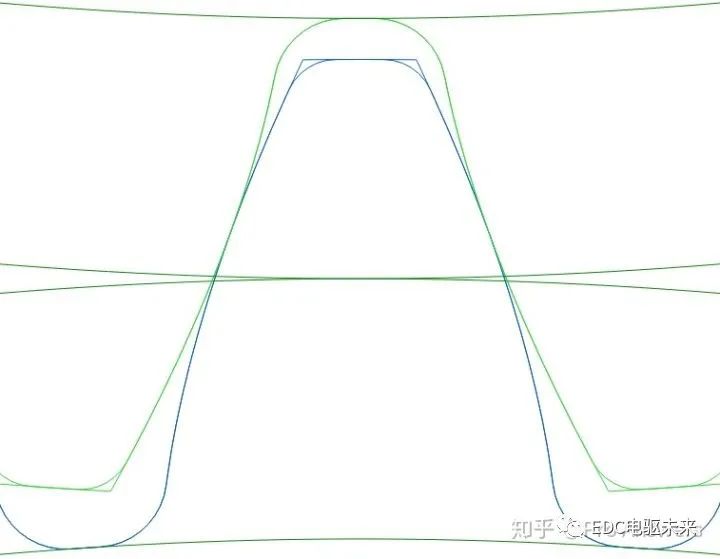
倒圆更接近渐开线的形状,并使得啮合时(从截面上看)一开始就是线-线接触。倒圆会减少啮合线“正确部分”的长度,因此在倒圆的同时,要增加齿顶高度。齿轮副参数:基于 ISO 53:1998轮廓A 齿形、0.5 模 48 齿(1 模 24 齿不容易调参)、19.8 度压力角(微调了一下,便于其他参数的调参)、厚度 7 mm、10 Nm 输入扭矩、4775 RPM 输入转速、5 kW 输入功率、齿根高系数 1.4、无变位、无其他修形、中心矩公差为 0、齿厚公差/背隙/齿距误差为 0、无摩擦。 (下列选取的都是该倒圆半径下传动精度最高的齿根高系数)此时,齿顶倒圆最大为 0.2157 mm(齿顶切圆),齿根高系数为 1.2402:
齿形
扭矩波动范围为(+0.035,-0.035)
齿顶倒圆 0.18 mm,齿根高系数 1.23:
齿形
扭矩波动范围为(+0.0050,-0.0075)
齿顶倒圆 0.16 mm,齿根高系数 1.21:
齿形
扭矩波动范围为(+0.005,-0.005)
齿顶倒圆 0.14 mm,齿根高系数 1.19:
齿形
扭矩波动范围为(+0.005,-0.005)
由上可见,齿顶倒圆能将(无加工误差、无摩擦的理想条件下的)输出扭矩波动从(+0.035,-0.035)降低至(+0.005,-0.005),即波动率从 0.7% 降低至 0.1%,甚至低于摩擦力导致的扭矩波动(0.2% 左右),传动精度提高了 7 倍。观察不同倒圆半径下,输出扭矩曲线的变化规律(倒圆半径越小,则曲线越趋近于波峰在 C 点左侧、波谷在 C 点右侧;倒圆半径越大,则曲线越趋近于波谷在 C 点左侧、波峰在 C 点右侧),可以发现,倒圆半径为 0.15 mm 左右时,解的结果是最稳定的,即 0.15 mm 是最优倒圆半径。
4. 齿『根』修形(齿根『圆角』半径)
(容许范围内)齿根『圆角』半径越大则齿根强度越高,并且对传动精度几乎没(非常非常小)影响,可以直接取最大容许(不发生干涉)的齿根『圆角』半径,“胆小”的朋友也可以使用保守值『根圆角半径系数 0.45(DIN 867:1986 以及一些论文推荐参考的数值)』。齿轮副参数:20 度压力角、厚度 5 mm(此处应该取 7 mm,答主做图表时疏忽了,因此下文中齿根安全系数偏低、使用寿命偏低,但不影响结论的正确性)、无修形、无变位,10 Nm 输入扭矩、4775 RPM 输入转速、5 kW 输入功率、中心矩公差为 0、齿厚公差/背隙/齿距误差为 0、无摩擦』,齿根圆角半径系数为 0.38(ISO 53:1998轮廓A 齿形规定的)。未调整齿根圆半径(齿根圆角半径系数 0.380):
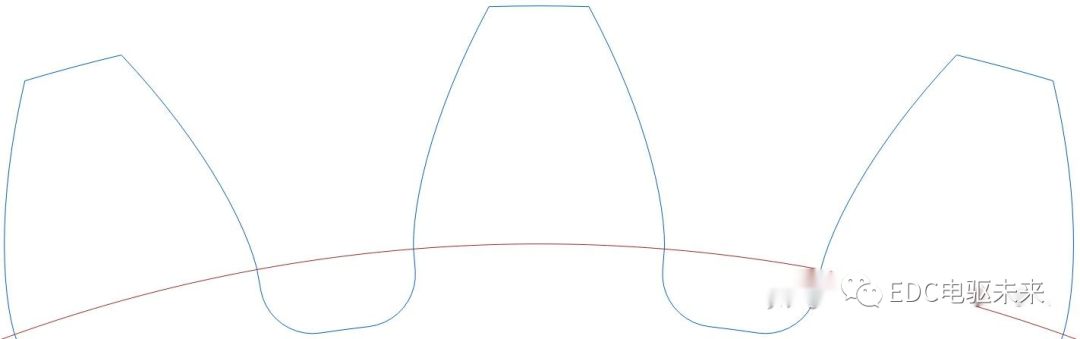
齿形(齿根圆角半径系数 0.380)
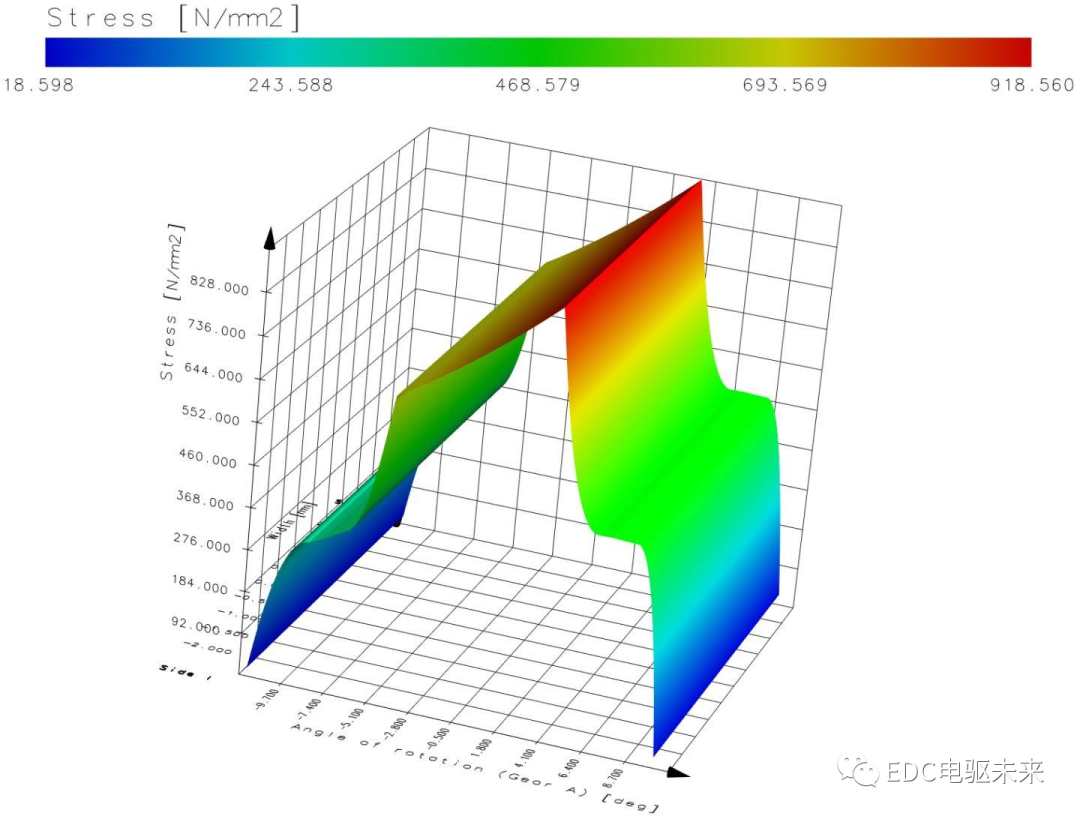
齿根区域应力(齿根圆角半径系数 0.380)
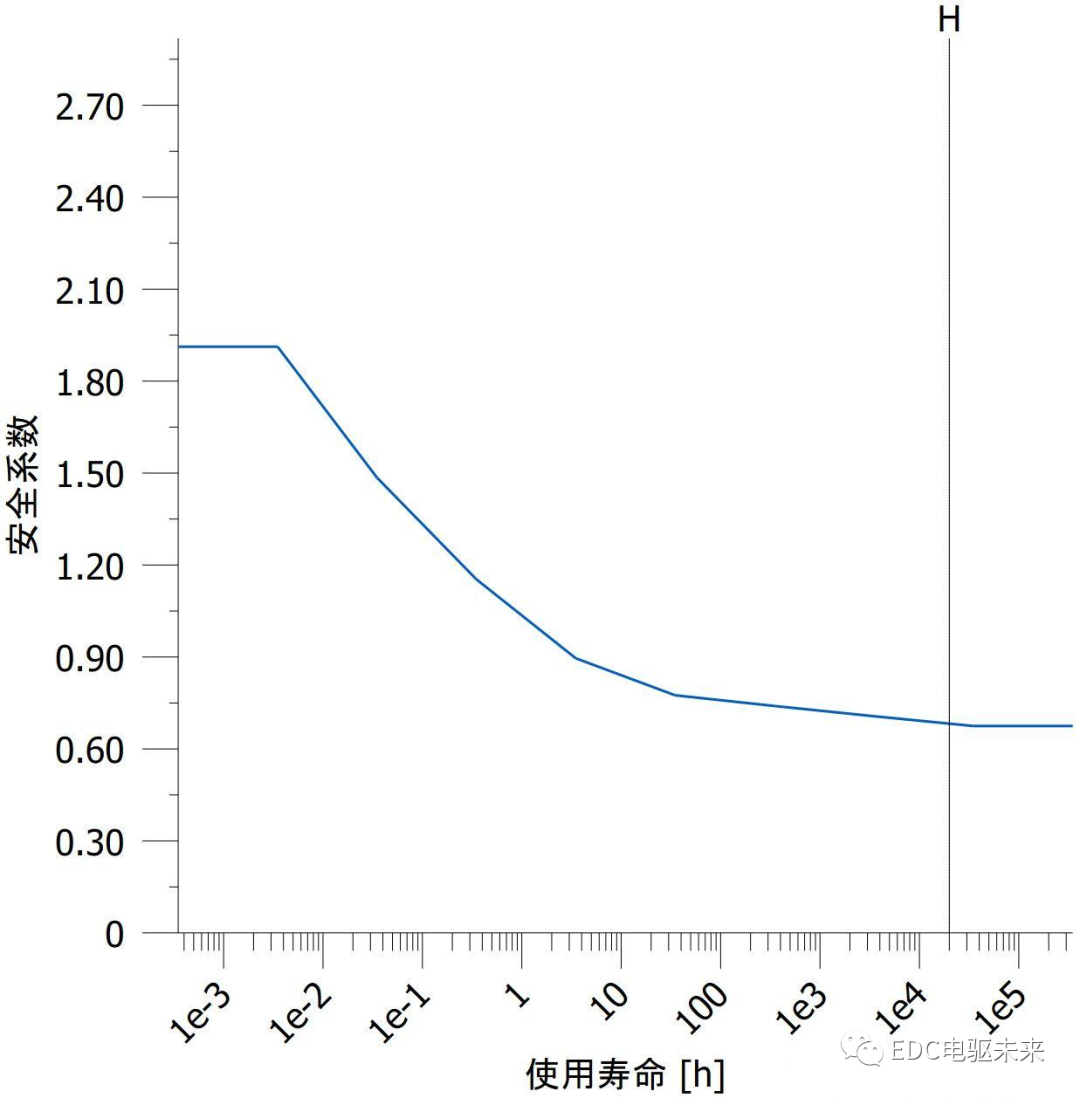
齿根安全系数(齿根圆角半径系数 0.380)
输出扭矩曲线(齿根圆角半径系数 0.380)
将齿根圆半径系数增至 0.471(本应设定为 0.45,答主做图表时疏忽了):
齿形(齿根圆角半径 0.471)
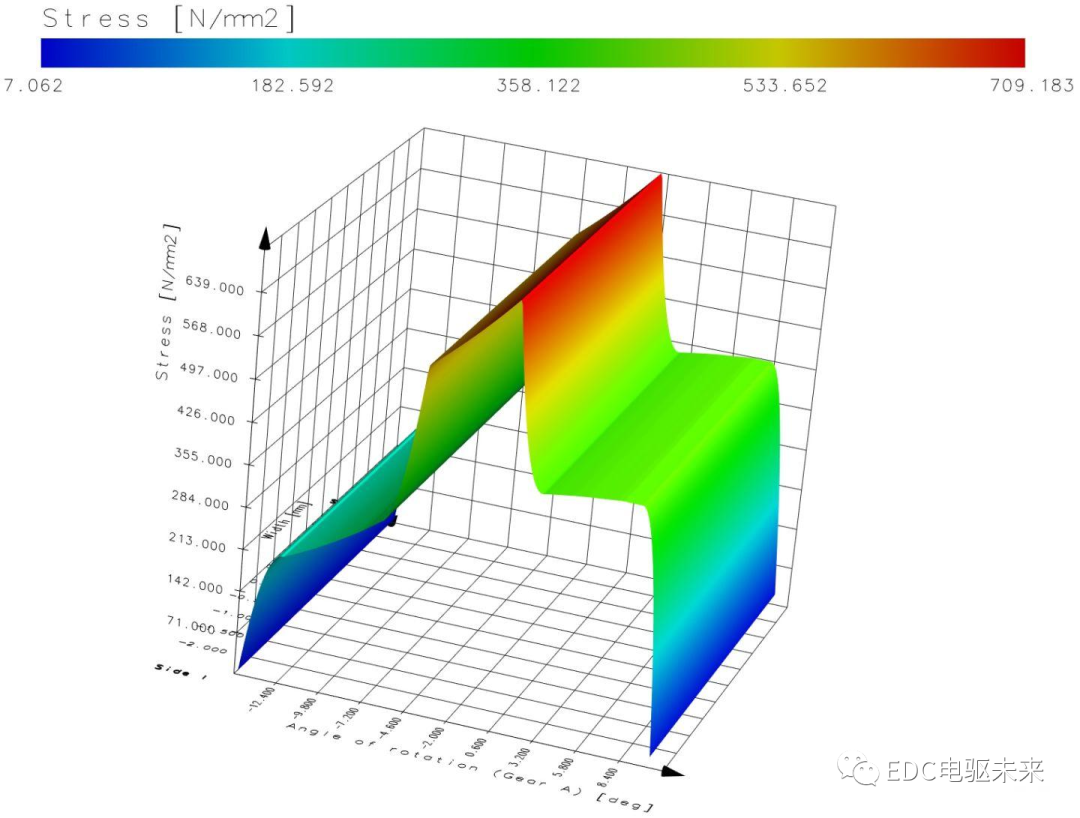
齿根区域应力(齿根圆角半径系数 0.471)
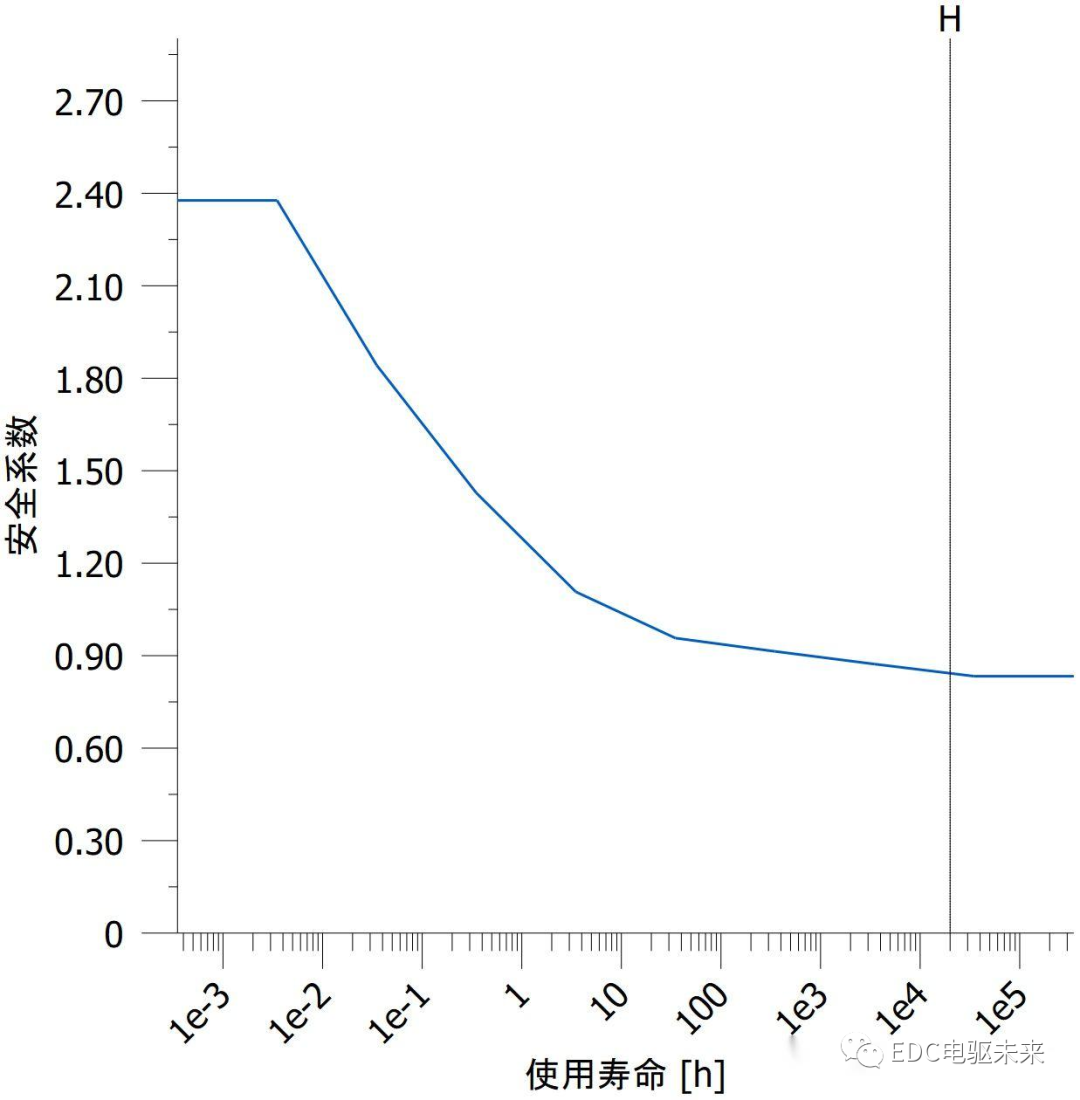
齿根安全系数(齿根圆角半径系数 0.471)
输出扭矩曲线(齿根圆角半径系数 0.471)
5. 齿『根』修形(齿根『圆』半径)
减小齿根『圆』半径,会增大齿根应力,同时略微提高传动精度,对于 20CrMnTi(精密齿轮钢,屈服极限 850 MPa,通常认为齿根应力不超过 500 MPa 时,齿根拥有无限强度),只有齿根应力高于 600 MPa 左右时,才能达到提高传动精度的效果,『减小齿根『圆』半径』和『减小齿厚』提高传动精度的机理都是如此,因此不应使用这种方式提高传动精度,否则齿轮寿命(按照齿根安全系数预测)将不超过 100 小时。
6.变位
精密传动齿轮不会考虑变位,变位有三大作用:
实现任意中心距。如 1 模齿轮实现 77.77 mm 这样的中心距。
提高重合度。直齿轮的重合度接近 2 或 3 时,噪音会有极大降低。部分教材提及重合度有助于提高传动平稳性,但对于高精度齿轮(背缝小于 10 arcmin,即齿厚误差 0.01 mm 左右)而言,重合度对传动平稳性基本没有促进作用。
减小滑动率(滑动比/比滑)。主要作用是控制能量损耗(齿面发热)。
精密传动并不需要以上三个特性中的任何一个,变位齿轮还会对齿轮设计调参带来极大的不便(两个齿轮分开调参,工作量大了很多),因此精密传动普遍不使用变位齿轮。
8. 『至高』传动精度 (无加工误差、无摩擦下)0.1% 扭矩波动率,仍然还不是能达到的最高传动精度,更进一步地提高传动精度,需要考虑降低摩擦力对扭矩波动的影响。此外,加工误差对传动精度的影响,是可以被定量分析的。答主会将这些内容写在之后的回答中。
-----------------------------------------------------------------
审核编辑 :李倩
-
消除齿轮传动间隙的措施有哪些2024-06-14 5302
-
对角修形在齿轮TE仿真分析中的应用2023-12-20 3628
-
电驱动高转速齿轮的制造策略方案2023-02-13 943
-
行星齿轮传动系统的修形降噪技术研究2023-02-03 2626
-
介绍变速器齿轮制造中根部挖根和台阶的定义和影响2023-01-30 9392
-
如何修复球磨机小齿轮轴磨损问题2021-09-26 1154
-
减速机构:蜗杆斜齿轮减速机构设计2018-10-31 4102
-
汽车减速器齿轮鼓形的确定2018-04-17 2510
-
高变位齿轮的修形研究2018-03-27 1004
-
斜齿轮传动是怎么转动的,斜齿轮传动的原理2016-10-26 21719
-
齿轮心脏2016-05-05 1190
全部0条评论

快来发表一下你的评论吧 !
