

3D视觉的进步--软件改善箱中取物
描述
3D视觉的进步--软件改善箱中取物
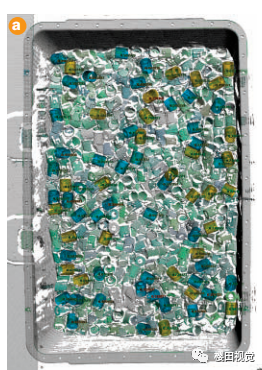
无序的箱中取物难以执行是由于每个目标物体都被任意且毫无章法地放置在容器中。
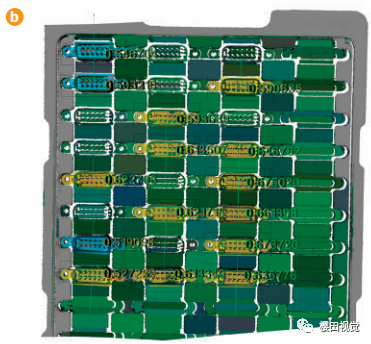
有序的箱中取物,即每个目标物体都按规则且可预测的模式排列。
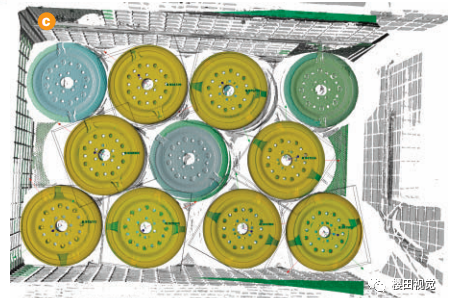
半有序的箱中取物对于机器人而言较为困难,因为仅可预见部分目标物体的位置。
作为制造业自动化过程中的关键组成部分,工业机器人的数量在全球范围内逐年递增。以美国为例,2017年的数量是每10000个员工中有200个机器人,全球排名第七。韩国位居第一,机器人数量是710,其次是新加坡,数量是658。
许多工业生产过程如今都实现了自动化,而这在几年前还是不可想象的。在工业自动化需克服的众多难题中,极主要的问题之一便是视觉引导的机器人技术,尤其是箱中取物领域,它涉及到机器人对箱中任意摆放物体的选择与拾取。机器人在取物后要对物体做些什么取决于具体的应用领域。有时机器人取物后的投放位置和定位无关紧要,它在取物后仅需将物体放入另一容器中或传送带上,比如非托盘化运输的应用领域。
在其他领域中,机器人需要以规定的方式放置所拾取的物体。这种取放方式涉及的应用领域包括零件的自动化组装或后加工处理,其中可能涉及到检测系统,物体被拾取后可能会检测为不良品。这种方式使得整个自动化过程的效率得到更优化。
1
拾取信封属于对选取物体的放置位置无要求(pick and drop)的应用,在这种情况下放置的位置和定位无关紧要。机器人只需将信封放在传送带上即可。

2
在对选取物体的放置位置有要求(pick and place)的应用领域中,机器人拾取目标物体后定向地将其放置在确切的位置。
箱中取物的另一分类方法是基于目标物体被拾取之前在箱中的排列方式。根据此分类,箱中取物可分为三种类型:有序化、半有序化和无序化取物。
有序化箱中取物是较简单直接的机械化应用。每个目标物体都按有序且可预测的模式排列,因此机器人可以轻而易举地拾取目标物体。例如在如下场景中,箱中的瓶子有序排列,瓶盖朝上让机器人可以轻松地拾取到。虽然需要花费额外的时间将瓶子有序地放置在箱中,但是每个物体之间的取放时间整体得到了缩减。
半有序化的箱中取物涉及的应用领域包括部分目标物体有序排列的情况。这给机器人对目标物体的定位和拾取增加了难度。比如拾取成堆放置的部件,如用于热加工成型的金属板。每个物体的拾取时间取决于具体的应用领域以及排放的难度。
对于无序化箱中取物而言,箱中每个目标物体的位置都是完全随机且不可预测的。比如,无序化箱中取物适用于装满随意放置的小型金属配件的容器,这些小型金属配件需要被一个一个地拾取。这些配件可能叠放或缠在一起,从而进一步加大了定位和后续拾取的难度。这一类分拣是较先进的,它将箱中取物带入了一个新的领域。同时它也取决于机器视觉和抓取技术的先进程度。
审核编辑 :李倩
-
iTOF技术,多样化的3D视觉应用2025-09-05 383
-
浩辰3D软件中如何创建槽特征?3D模型设计教程!2020-09-28 1763
-
3D软件中怎么绘制杯子?2021-01-28 4631
-
3D制图软件中怎么设计凸轮?3D设计凸轮教程2021-04-25 7193
-
3D设计软件中怎么创建风扇叶模型?浩辰3D基础教程2021-06-04 5265
-
3D成像视觉引导系统2016-01-04 893
-
3D技术的应用探索3D机器视觉库2016-03-22 1158
-
3D光立方取模应用程序软件免费下载2018-07-04 1914
-
如何在3D机器视觉应用中利用DLP?2021-05-01 4166
-
一文带你看懂3D视觉2021-09-01 7835
-
3D视觉传感器的精度是指什么2022-03-28 3339
-
Zivid 3D视觉解决方案的优势是什么2022-04-28 3798
-
智造之眼®深入3D视觉应用2023-01-03 1851
-
一文了解3D视觉和2D视觉的区别2023-12-25 5688
-
科技元宇宙,裸眼3D视觉训练一体机——您的视力改善专家2024-05-23 1941
全部0条评论

快来发表一下你的评论吧 !
