

交流传动机车制动控制器故障检测与安全导向
描述
项目名称:
CAB-B标准制动机在新型八轴货运电力机车的应用研究(X1985R)
魏传均 毛金虎 刘 杰
中车株洲电力机车有限公司
摘 要:
制动控制器的可靠性对于轨道交通车辆行车安全具有重要意义。鉴于此,提出了一种制动控制器故障检测与安全导向方法,其能有效提高制动控制器可靠性,解决因制动控制器故障导致的列车无法安全停车问题,提高制动系统的可靠性。
0 引言
制动系统是保证轨道交通车辆行车安全的关键装备,制动控制器作为发出制动控制指令的司机操纵设备,其可靠性直接关系到制动系统及机车的安全性。若制动控制器无法发出制动指令,则机车无法正常调速或安全停车;若制动控制器不能正确发出缓解指令,则机车无法正常开行,就会影响铁路线路的正常运行秩序。因此,提高制动控制器的可靠性具有重要意义。
1 制动控制器结构及电气原理
1.1制动控制器结构
制动控制器采用组合型结构,集成了自动制动控制单元(以下简称“大闸”)和单独制动控制单元(以下简称“小闸”),主要部件包括编码器、接近开关、微动开关、智能节点、排风阀等[1],其机械结构如图1所示。
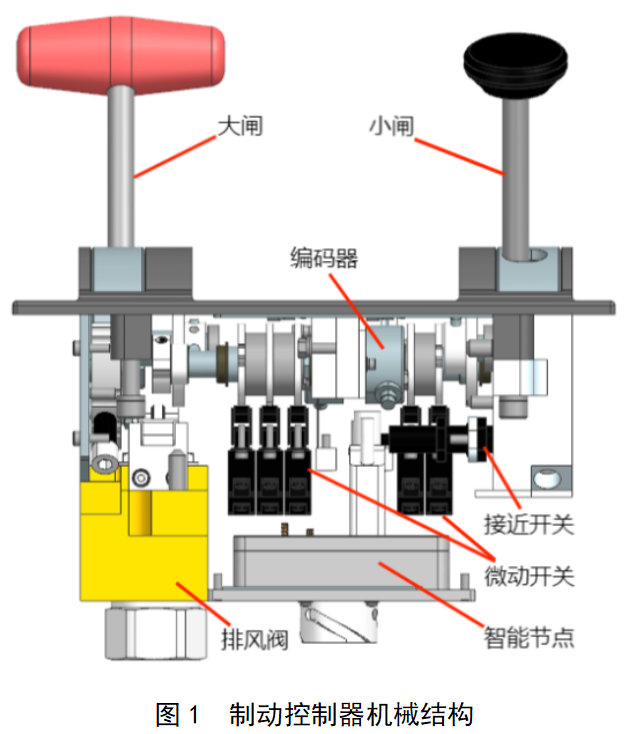
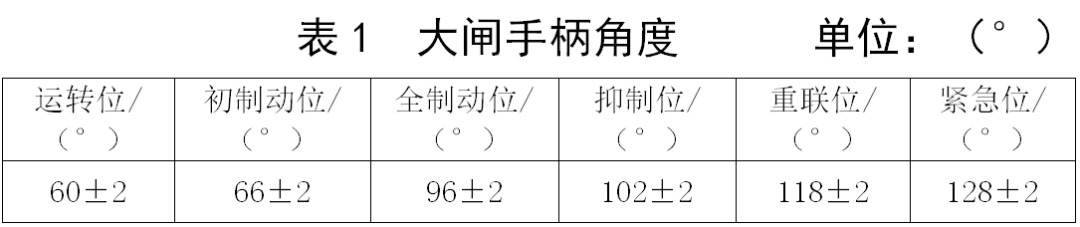
大闸手柄靠近操作者最近位的是运转位,往前推依次为初制动位、全制动位、抑制位、重联位、紧急位,初制动到全制动之间为常用制动区,每个位置相对于水平面的夹角如表1所示。
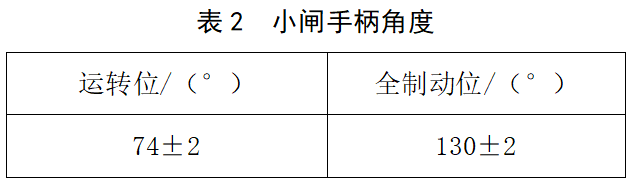
小闸手柄靠近操作者最近位的是运转位,往前最远位为全制动位,运转位与全制动位之间为常用制动区,每个位置相对于水平面的夹角如表2所示,小闸同时设置带自复位的侧压单缓位。
1.2制动控制器电气原理
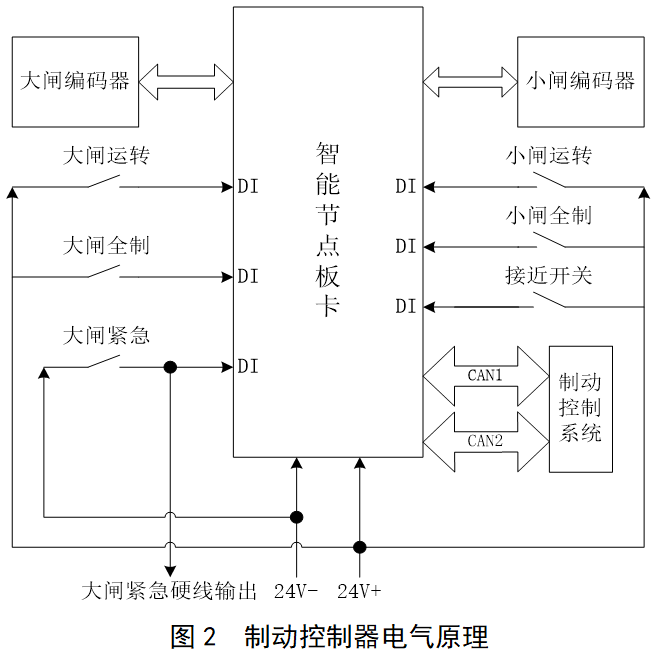
制动控制器电气原理框图如图2所示。
2 编码器闸位识别原理
操作制动控制器手柄时,带动编码器转动,手柄在不同的位置时,编码器输出对应的编码值,智能节点通过采集编码器输出值,判断大、小闸手柄所处的位置,输出相应的闸位,大闸编码器角度值与闸位对应关系如图3所示,结合手柄实际操作角度和故障检测需要,将运转位下限角度与紧急位上限角度范围设置为5°。

3 故障检测与安全导向
制动控制器故障检测主要针对其机械结构及电气部件故障进行检测,主要包括编码器故障、开关信号故障、智能节点故障,故障导向的原则为优先保障其安全性,保证车辆安全调速和停车。
3.1编码器故障
编码器故障具体包括闸位校准故障、编码器超范围故障、编码器与微动开关不一致故障。
3.1.1 闸位校准故障
若校准时操作不规范或校准时编码器值采集错误,则执行校准指令后,会上报校准故障,其判断条件为大闸运转位与紧急位校准值角度差值超过68°±4°,小闸运转位与全制动位校准值角度差值超过56°±4°,检测到故障后,大闸报自阀故障,小闸报单阀故障,提示操作人员重新校准。同时,闸位校准故障检测可在出厂时有效检测手柄机械角度是否符合标准要求。
3.1.2 编码器超范围故障
编码器超范围故障分为编码器零点或满量程输出,以及编码器输出值超过手柄运用角度范围[2],具体如下:
(1)编码器零点或满量程输出:编码器电源线或数据线故障时,编码器输出值将为最小值0x0000或最大值0x3fff。若智能节点采集到的编码器值为0x0000或0x3fff,则判断为编码器值输出错误,此时无法根据编码器值识别正确的闸位。
(2)编码器输出值超范围:正常情况下,大闸运转位到紧急位的角度范围为60°~128°,小闸运转位到全制动位的角度范围为74°~130°,当编码器输出值不在此范围内时,判断为编码器超范围故障,故障原因可能是大、小闸手柄出现机械松动,或编码器值偏移,此时闸位识别不准。
发生上述两种故障时,大闸发送自阀故障和自阀传感器故障,小闸发送单阀故障和单阀传感器故障。大闸故障时,制动系统惩罚制动停车,同时闸位导向为重联位;小闸故障时,制动区失效,通过运转位和全制动硬线信号实现小闸缓解或制动。
3.1.3 编码器与微动开关不一致故障
制动控制器主要根据编码器识别闸位,当编码器出现偏移时,将无法正确识别闸位,可能造成制动指令失效甚至自然缓解,因此,将编码器结合微动开关硬线信号输出最终的闸位,以此提高制动控制器可靠性[3]。
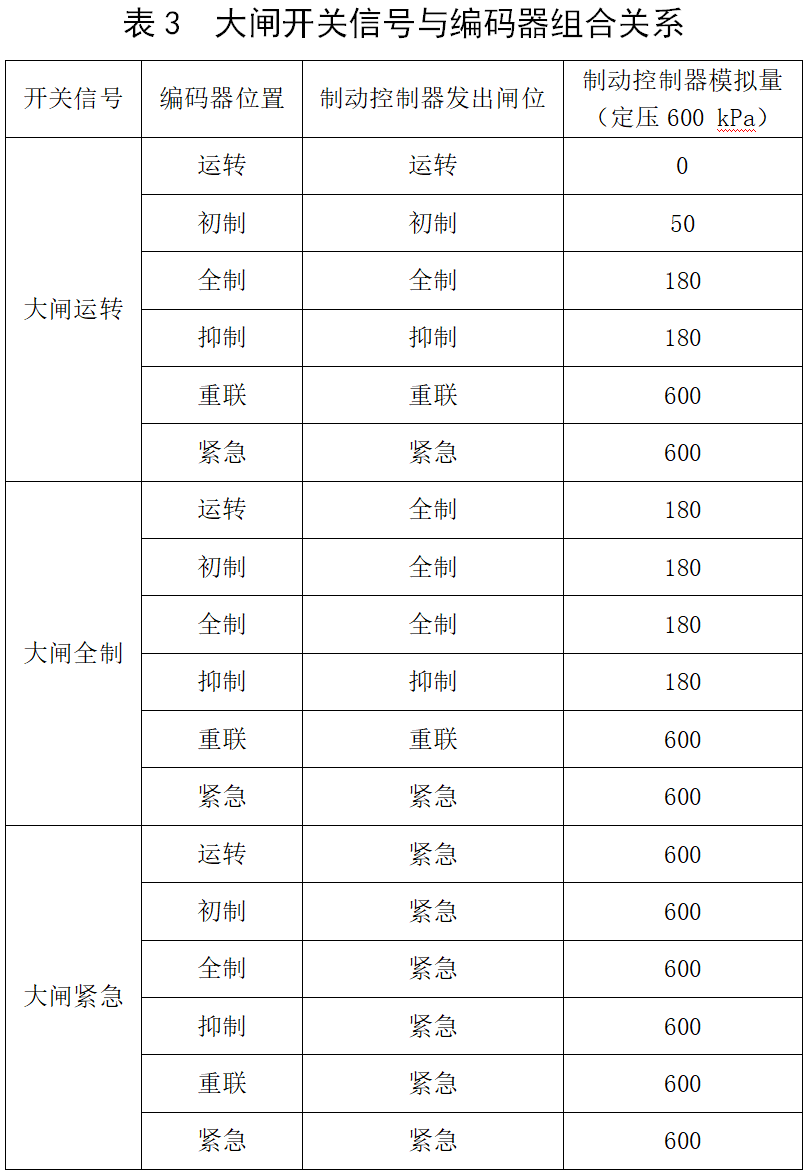
大闸闸位输出的原则:(1)编码器与硬线信号取大输出,制动减压量大的信号优先级最高;(2)只有当大闸编码器与微动开关同时处于运转位时,闸位才输出运转位,防止大闸异常缓解。
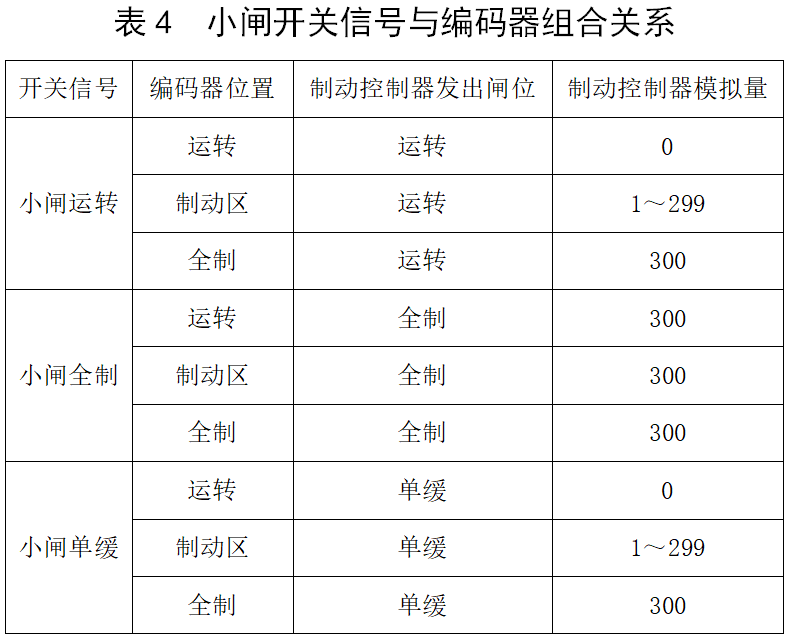
小闸闸位输出的原则:(1)小闸运转位和全制动位的闸位取硬线信号;(2)模拟量根据编码器值计算,全制动位硬线信号有效时,模拟量被强置为300。
大闸和小闸的闸位输出逻辑真值表分别如表3和表4所示。
3.2开关信号故障
开关信号故障包括微动开关无法正常断开、多个微动开关同时有效、单缓接近开关故障。
3.2.1 微动开关无法正常断开
操纵手柄在各区域移动过程中,若编码器离开该位置时,该微动开关硬线信号仍然有效,则表示编码器与微动开关不一致。出现此现象时,根据3.1.3节的原则,闸位按照表3和表4输出。检测到此故障时,制动控制器上报微动开关故障和自阀故障或单阀故障。
3.2.2 多个微动开关同时有效
由图2可知,大闸在运转位、全制动位、紧急位设置有微动开关,小闸在运转位和全制动位设置有微动开关。当大闸的三个微动开关有两个或三个同时有效时,则判断为大闸微动开关故障;当小闸的两个微动开关同时得电时,则判断为小闸微动开关故障。
大闸微动开关故障时,制动控制器上报自阀微动开关故障和自阀故障;小闸微动开关故障时,制动控制器上报单阀微动开关故障和单阀故障。
3.2.3 单缓接近开关故障
当接近开关错误地输出高电平时,将导致机车闸缸压力被缓解,存在安全隐患,因此制动控制器设计了接近开关故障检测功能,当检测到单缓位接近开关输出高电平信号时间超过3 min时,不再采信该信号,将输出的单缓位复位;当开关高电平信号消失后,再次变为高电平时,再次输出单缓位。
3.3智能节点故障
智能节点板卡故障主要包括数据存储器故障和软件运行异常。
3.3.1 数据存储器故障
智能节点板卡数据存储器用于存储大闸运转位、紧急位编码器校准值,小闸运转位、全制动位编码器校准值,在进行闸位校准时,将此4个数值存入存储器,在下一次上电时从存储器读取,若存储器故障,将导致上电后闸位校准值获取错误,无法确定闸位角度基准值,无法正确识别闸位。数据存储器故障检测原理如图4所示,当读取的大闸运转位与紧急位校准值角度差值超过68°±4°,小闸运转位与全制动位校准值角度差值超过56°±4°时,判断为数据存储器故障,上报自阀故障或单阀故障。
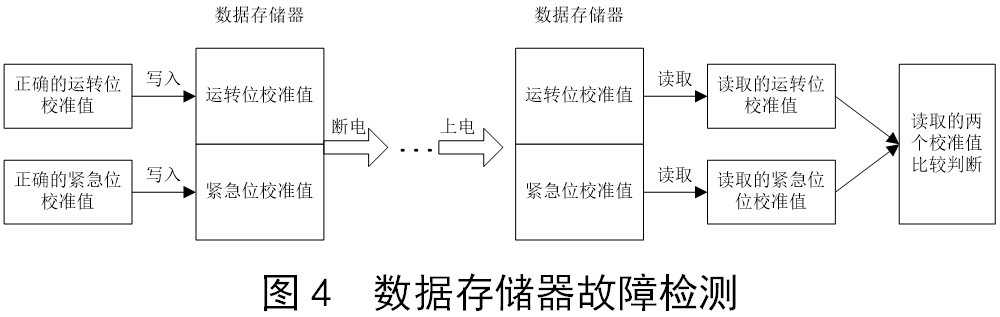
为了降低存储器故障造成闸位识别错误的概率,在闸位校准时,将校准值存储在N(N为大于3的奇数)个独立的地址空间,上电读取时,从N个地址读取存储值,最后取N个数据的中间值,以降低数据存取错误的概率,提高制动控制器可靠性。
3.3.2 智能节点软件运行异常
智能节点具有看门狗功能,当软件运行异常导致生命信号不再变化时,将触发看门狗复位功能,智能节点将在1.6 s内重启,系统恢复正常运行。
4 结语
本文提供了一种制动控制器故障检测与安全导向方法,能检测制动控制器编码器故障、开关信号故障、智能节点故障等,并做出相应的故障导向,提高了制动系统的安全性。该型制动控制器已批量使用,运行良好,满足新一代自主化制动控制系统的应用需求。
审核编辑:汤梓红
-
同功率的交流传动系统与直流传动系统那个省能耗?2024-01-09 0
-
[下载]交直流传动系统的自适应控制2009-03-30 0
-
怎么实现基于智能脉冲宽度调制控制的机车制动控制单元的设计?2021-05-14 0
-
基于MATLAB的交流传动机车异步电动机并联系统的设计与仿真2021-08-26 0
-
现代交流传动技术及其控制系统 精选资料分享2021-09-08 0
-
交流传动系统高性能控制及MATLAB/SIMULINK建模2021-09-13 0
-
交直流传动技术实训教材2008-12-05 743
-
交流传动电力机车谐振原因分析与对策2009-04-08 438
-
交流传动电力机车新型辅助电源的研究2011-02-22 665
-
交流传动内燃机车用牵引电动机研制2017-01-01 666
-
变频器和PLC在四辊轴交流传动控制系统中的应用2017-11-13 685
-
LLC谐振全桥变换器在交流传动电力机车充电机中的应用2021-08-31 651
全部0条评论

快来发表一下你的评论吧 !
