

基于W5500的Modbus TCP服务器设计
描述
前面我们设计实现了W5500的驱动程序,也讲解了驱动的使用方式。在最近一次的项目应用中,正好有一个使用W5500实现TCP通讯的需求,所以我们就使用该驱动程序轻松实现。这一篇中我们就来说一说基于我们W5500通讯驱动程序实现TCP通讯的过程。
1、应用需求
在本次应用中,要求实现一个基于W5500的Modbus TCP服务器。这个需求的描述虽然只有一句话,但是这个需求的内容可不简单。我们首先来分析一下这个需求的具体内容。
为了实现基于W5500的Modbus TCP服务器,我们必先须基于W5500实现一个TCP服务器。W5500本身是带硬件协议栈的,但却并不带TCP服务器。不过在我们前面的关于外设驱动库的系列文章中已经封装了W5500的驱动,其中就带有一个TCP服务器,我们可以直接采用就可以了。
其次我们要在TCP服务器的基础上实现Modbus TCP协议。关于Modbus协议栈,我们以前的文章就讲述过Modbus通讯协议栈的开发问题。而且我们已经将我们开发的Modbus通讯协议栈开源。其中已经封装了Modbus TCP服务器对象,所以我们直接采用这一Modbus通讯协议栈就可以了。
有了驱动和协议栈,我们还需要考虑应用层面的具体问题,而且也只需要考虑应用层面的具体问题。这里就看出我们前面封装外设驱动和Modbus通讯协议栈的价值所在了。关于应用层面的问题我们主要需要重点考虑几个问题:
第一,数据的存储类型及地址范围。我们知道Modbus协议常见的数据类型有4种。我们需要考虑在系统中需要使用到的类型及地址,这将决定Modbus协议数据处理回调函数的实现。
第二,网络配置问题,我们需要通过网络访问这台下位机就需要要为其配置网络。这存在静态配置,动态配置和系统自动分配的问题。作为服务器,我们一般不会希望让系统自动分配。所以我们需要考虑的是如何方便使用者为其分配地址的问题。
第三,并发访问的问题。挂载在网络上的服务器肯定面临多个客户端来访问的问题。W5500可以实现8个Socket,而Modbus TCP通用的默认端口号是502,当然也可以使用其它端口,只要不冲突就好。所以我们可以考虑使用不同的Socket和不同的端口号来实现并发访问。
2、功能设计
我们分析了基于W5500实现Modbus TCP服务器的需求。我们现在从硬件和软件两个方面来分析器功能的实现。
2.1、硬件功能设计
我们知道W5500带有硬件协议栈,集成有以太网控制器和物理层,所以对外我们只需要实现以太网变压器和硬件接口就好了。但与控制器部分的连接则采用SPI接口,除此之外还需要提供中断输入和模式设定的相关接口。在这里我们设计器硬件连接如下:
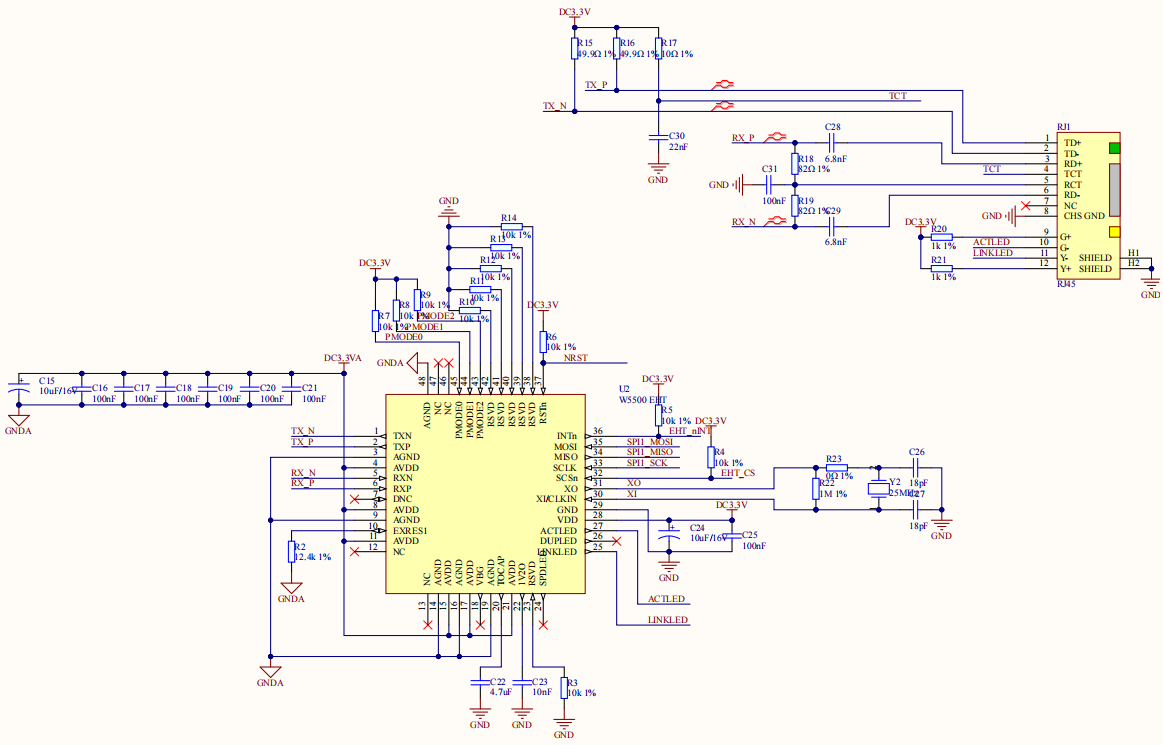
在上图中,我们将中断输入引入到MCU的GPIO端口,而模式设定PMODE0、PMODE1、PMODE2均通过电阻上拉到电源。对于W5500来说PMODE0、PMODE1、PMODE2均为高电平表示开启全部功能,所以我们直接拉高而不是引入到MCU引脚来控制。
2.2、软件功能设计
从需求来说,软件的功能非常简单,就是实现一个Modbus TCP服务器。但实际上,如我们前面所描述的那样,软件需要考虑的问题还是比较多的。从功能实现上主要有3个方面需要考虑:
第一,实现TCP服务器,这个服务器用于在系统中轮询处理,从W5500获取数据和发送数据给W5500都需要通过这部分来实现。
第二,TCP服务器得到数据后,我们需要解析数据,并根据解析的上位数据决定进一步的动作,还需要生成返回信息。这部分对应功能就是Modbus TCP服务器的实现。
第三,根据Modbus TCP服务器解析出的Modbus消息,需要决定下一步的动作,这个具体动作根据功能码的不同可能有不同需求,所以我们需要根据具体的要求实现不同功能码的动作。
根据上述的设计,我们可以简单的将需要实现的软件功能图示如下:
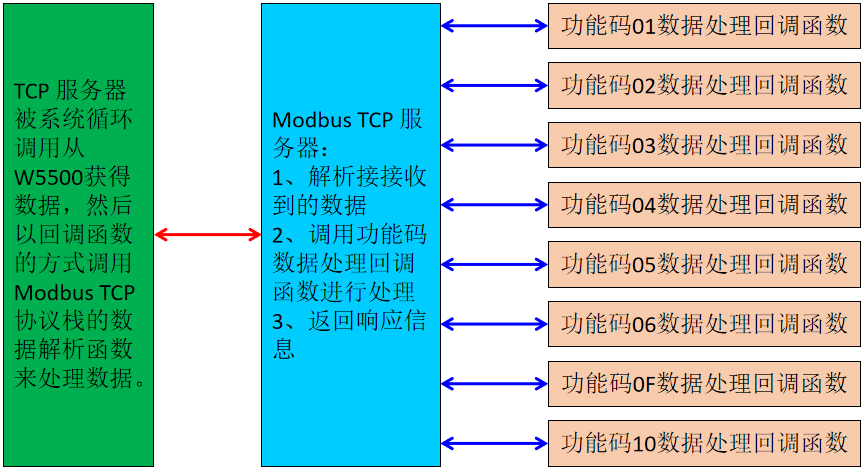
上图中,因为W5500的TCP服务器以及Modbus TCP协议栈的相关函数我们都做了封装,所以它们之间的调用都将以回调函数的方式实现。除了上述的软件实现外,还需要注意必要的初始化配置。
3、应用实现
根据我们前面的设计,接下来我们考虑一下这一需求的具体实现过程。我们将这一过程分为4个部分来分别描述。
3.1、系统的初始化
在实现具体的功能之前,我们需要对硬件以及软件环境做必要的初始化配置。具体到这里就是对W5500作必要的软硬件配置,包括接口、网络以及回调函数等。具体实例代码如下:
/* 以太网通讯配置 */
void McEthernetConfiguration(void)
{
uint8_t mac[6]={0x01, 0x08, 0xdc,0x00, 0xab, 0xcd}; //本地Mac地址
uint8_t ip[4]={192, 168, 1, 190}; //本地IP地址
uint8_t sn[4]={255,255,255,0}; //子网掩码
uint8_t gw[4]={192, 168, 1, 1}; //网关地址
uint8_t dns[4]={0,0,0,0}; //DNS服务器地址
/* 以太网使用GPIO初始化 */
GPIO_Init_Configuration();
/* SPI1端口初始化 */
SPI1_Init_Configuration();
/*W5500对象初始化函数*/
W5500Initialization(&w5500, //W5500对象
mac, //本地Mac地址
ip, //本地IP地址
sn, //子网掩码
gw, //网关地址
dns, //DNS服务器地址
NETINFO_STATIC, //DHCP类型
EnterCritical, //进入临界区
ExitCritical, //退出临界区
EnableChipSelect, //片选使能
DisableChipSelect, //片选失能
ReadByteBySPI, //SPI读字节
WriteByteBySPI, //SPI写字节
W5500DataParsing, //报文解析函数
NULL //数据请求函数
);
}
在这个实例中,我们对网络部分采用的是静态配置,就是说网络参数是固定不变的,而且我们的测试环境只限于局域网内。
3.2、数据处理函数
数据处理函数是最灵活的,因为每个项目及每个人对数据处理的要求都是不一样的,只要能符合应用要求就没问题。需要说一下的是,这部分是Modbus协议栈对处理数据的要求,想要详细了解的话,可以看我们以前关于Modbus协议站的文章。对于这个实例,数据处理函数如下:
/*获取想要读取的Coil量的值*/
void GetCoilStatus(uint16_t startAddress,uint16_t quantity,bool *statusList)
{
uint16_t start;
uint16_t count;
/*先判断地址是否处于合法范围*/
start=(startAddress>CoilStartAddress)?((startAddress<=CoilEndAddress)?startAddress:CoilEndAddress):CoilStartAddress;
count=((start+quantity-1)<=CoilEndAddress)?quantity:(CoilEndAddress-start);
for(int i=0;i/*获取想要读取的保持寄存器的值*/
void GetHoldingRegister(uint16_t startAddress,uint16_t quantity,uint16_t *registerValue)
{
uint16_t start;
uint16_t count;
/*先判断地址是否处于合法范围*/
start=(startAddress>HoldingRegisterStartAddress)?((startAddress<=HoldingRegisterEndAddress)?startAddress:HoldingRegisterEndAddress):HoldingRegisterStartAddress;
count=((start+quantity-1)<=HoldingRegisterEndAddress)?quantity:(HoldingRegisterEndAddress-start);
for(int i=0;i/*设置单个线圈的值*/
void SetSingleCoil(uint16_t coilAddress,bool coilValue)
{
/*先判断地址是否处于合法范围*/
if(coilAddress<=12)
{
dPara.coil[coilAddress]=coilValue;
}
}
/*设置多个线圈的值*/
void SetMultipleCoil(uint16_t startAddress,uint16_t quantity,bool *statusValue)
{
uint16_t endAddress=startAddress+quantity-1;
if((startAddress<=12)&&(endAddress<=12))
{
for(int i=0;i/*设置单个寄存器的值*/
void SetSingleRegister(uint16_t registerAddress,uint16_t registerValue)
{
bool noError=(bool)(((50<=registerAddress)&&(registerAddress<=59))
||((73<=registerAddress)&&(registerAddress<=74))
||((90<=registerAddress)&&(registerAddress<=91)));
if(noError)
{
aPara.holdingRegister[registerAddress]=registerValue;
}
}
/*设置多个寄存器的值*/
void SetMultipleRegister(uint16_t startAddress,uint16_t quantity,uint16_t *registerValue)
{
uint16_t endAddress=startAddress+quantity-1;
bool noError=(bool)(((18<=startAddress)&&(startAddress<=28)&&(18<=endAddress)&&(endAddress<=28))
||((50<=startAddress)&&(startAddress<=59)&&(50<=endAddress)&&(endAddress<=59))
||((73<=startAddress)&&(startAddress<=74)&&(73<=endAddress)&&(endAddress<=74))
||((90<=startAddress)&&(startAddress<=91)&&(90<=endAddress)&&(endAddress<=91)));
if(noError)
{
for(int i=0;i 3.2、数据解析函数
大家可能在前面的初始化函数中发现有一个名为W5500DataParsing的数据解析函数。这个函数是W5500驱动中,TCP服务器的要求,实现对数据的解析。因为具体的应用层协议解析多不胜数,所以设计成了回调函数,其函数原型如下:
/*解析接收到的数据*/
typedef uint16_t (*W5500DataParsingType)(uint8_t *rxBuffer,uint16_t rxSize,uint8_t *txBuffer);
对于我们来说,我们需要根据具体的应用层协议来实现这一函数。不过我们采用的Modbus TCP协议,在我们的Modbus协议栈中已经实现了解析函数,所以我们调用如下:
/*报文解析函数*/
static uint16_t W5500DataParsing(uint8_t *rxBuffer,uint16_t rxSize,uint8_t *txBuffer)
{
/*解析接收到的信息,返回响应命令的长度*/
return ParsingClientAccessCommand(rxBuffer,txBuffer);
}
3.3、TCP服务器
我们在前面已经说过了,需要对服务器进行轮询。所以我们需要在一个进程中轮询访问W5500的TCP服务器。同样我们也要考虑多客户端同时访问的问题,我们将轮询函数实现如下:
/* 以太网通讯处理 */
void McEthernetProcess(void)
{
/*TCP服务器数据通讯*/
W5500TCPServer(&w5500,Socket0,502);
W5500TCPServer(&w5500,Socket1,503);
W5500TCPServer(&w5500,Socket2,504);
W5500TCPServer(&w5500,Socket3,505);
W5500TCPServer(&w5500,Socket4,506);
W5500TCPServer(&w5500,Socket5,507);
W5500TCPServer(&w5500,Socket6,508);
W5500TCPServer(&w5500,Socket7,509);
}
事实上使用同一个Socket和不同的端口也是可以实现多客户端访问的,但既然有8个Socket,用起来自然更好一点。
4、应用验证
我们已经根据需求实现了一个Modbus TCP服务器,究竟效果如何呢?我们还需要测试一下,以确认设计的正确性。
4.1、通讯测试
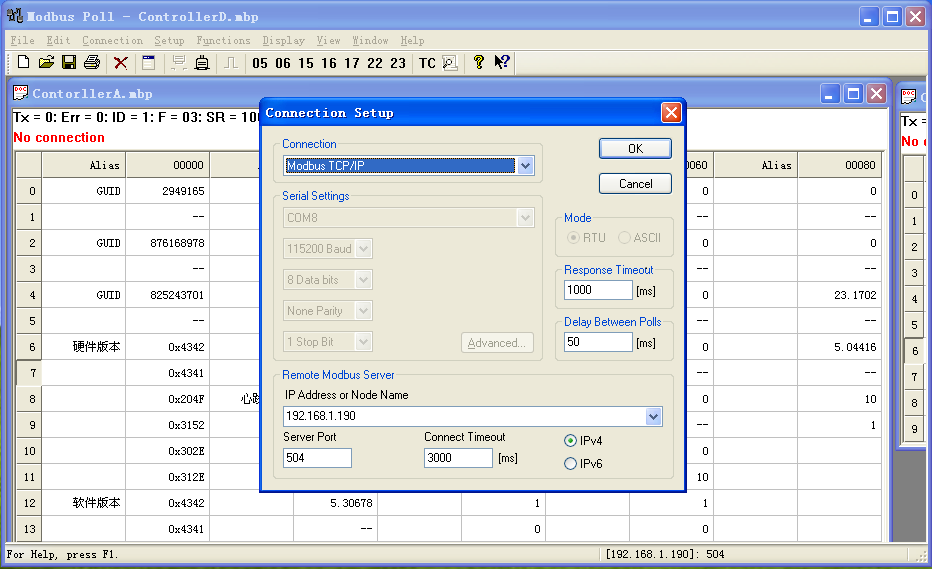
我们将目标板连接到局域网中,使用著名的Modbus Poll软件来测试一下我们设计的程序是否符合要求。
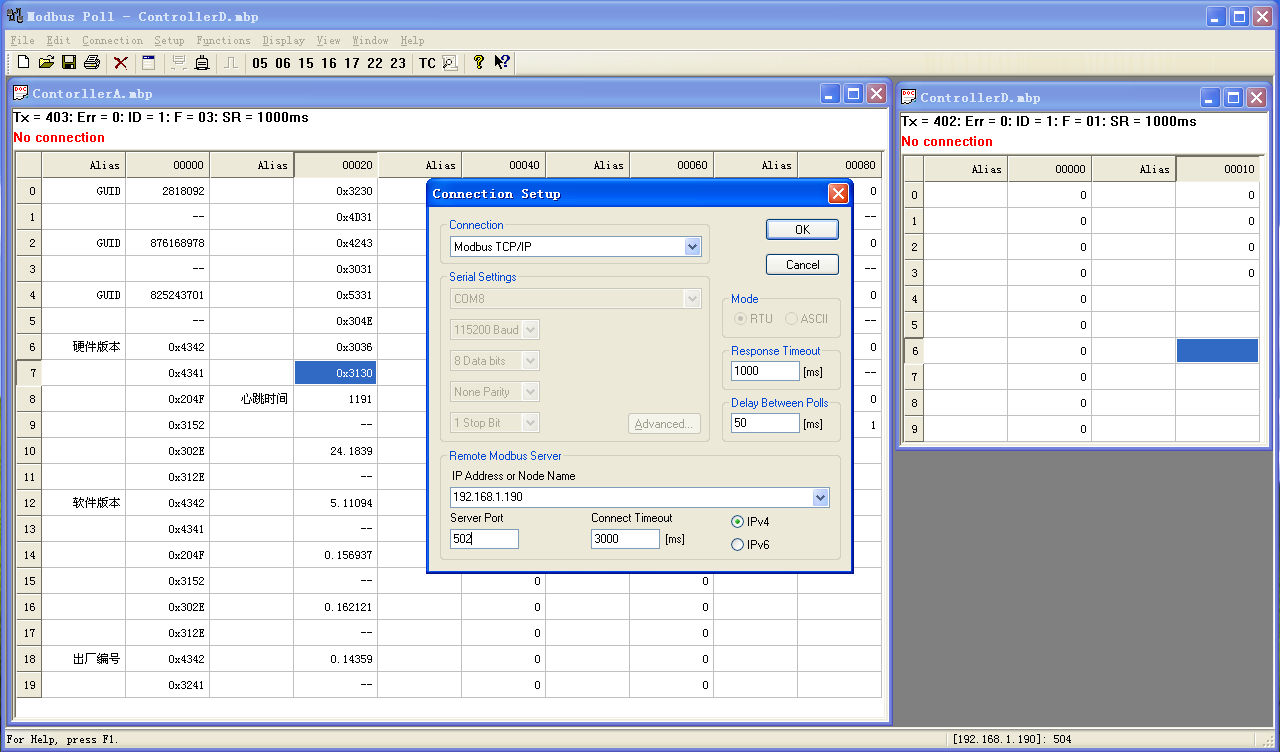
我们首先在一台机器上连接端口为504的Modbus TCP服务器,连接正常且数据获取也完全正确。具体如下图所示:
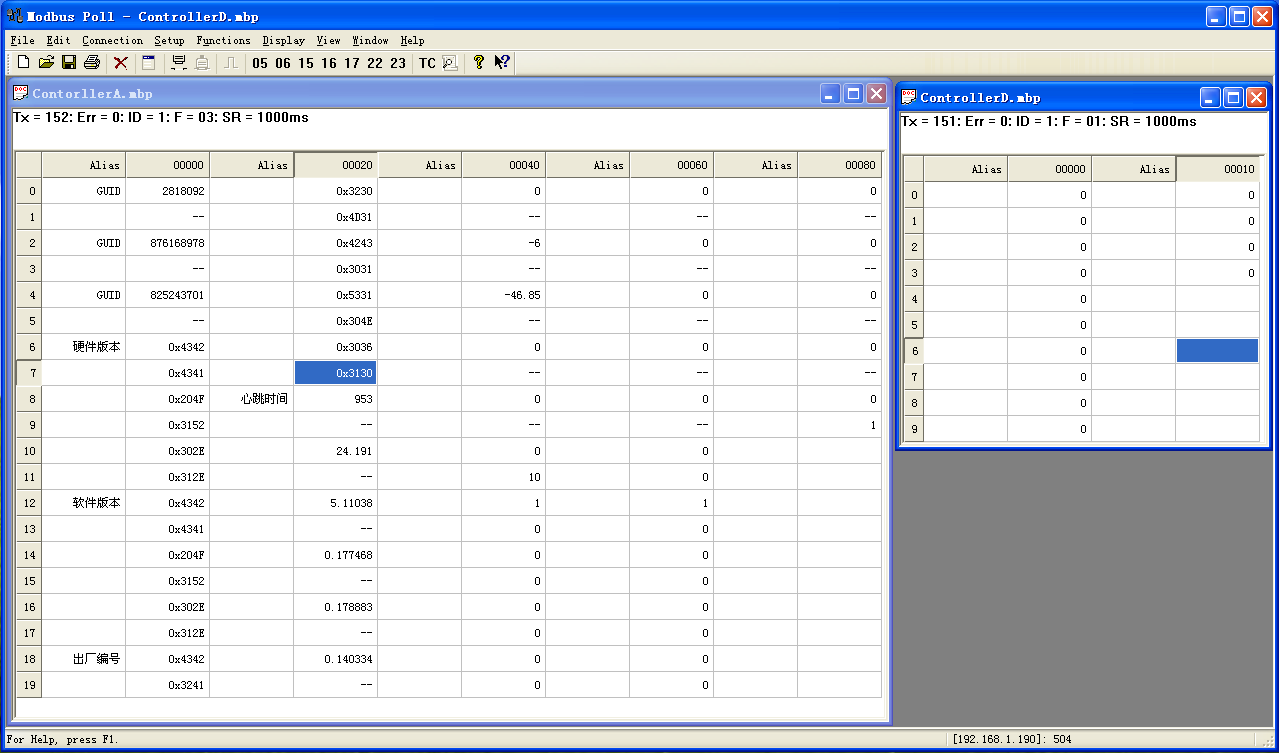
同时,我们采用局域网内的另一台机器连接端口为502的Modbus TCP服务器,连接正常且数据获取也完全正确。具体如下图所示:
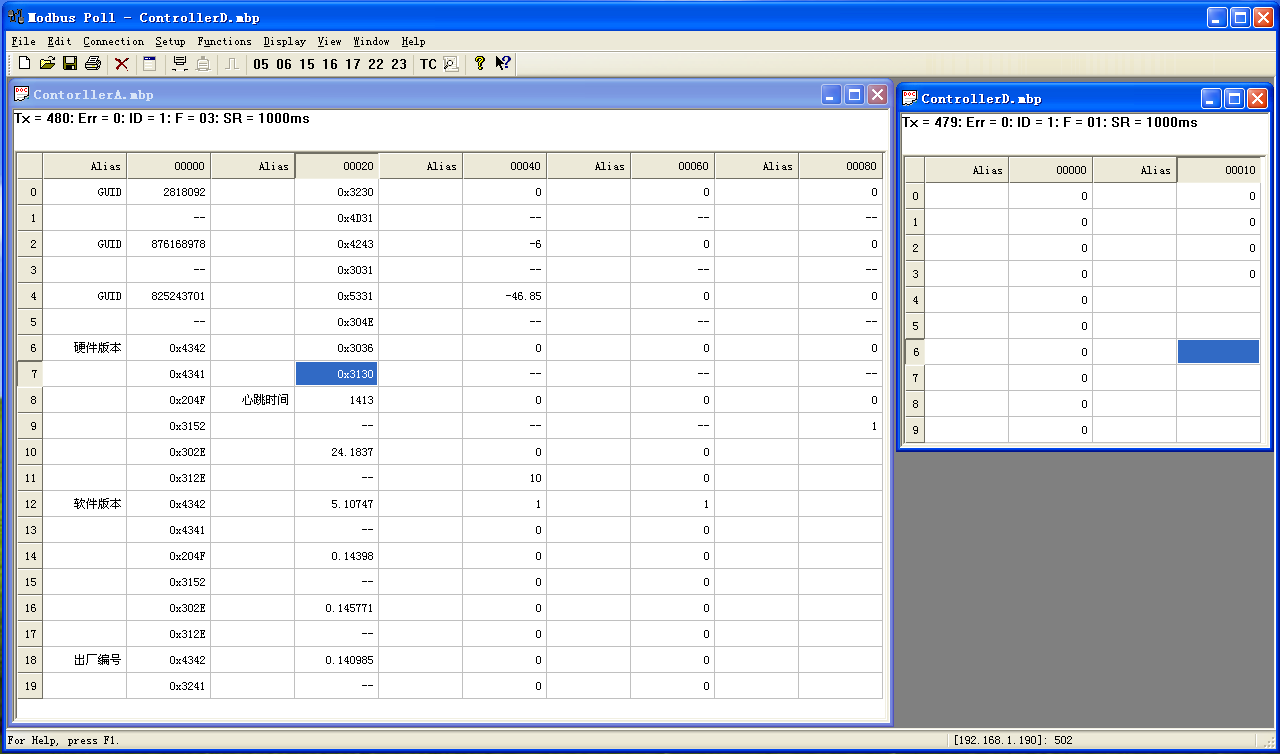
经过上述测试,我们可以确定我们实现的Modbus TCP服务器是可行的,而且在多客户端并行访问下也可以正确工作。
4.2、小结
这一篇中,我们实现了可以支持多客户端访问的Modbus TCP服务器,经测试运行也符合设计预期。这里我们将需要考虑的几个问题总结如下:
关于初始化配置的问题,在这个例子中,我们对网络的配置是直接在软件上固定死的,这样做虽然简单直接但并不是一个好的选择。更好的办法是可以让使用者自己配置,方法有多种,可以根据自己的实际情况,在软件上进一步的考虑。
关于数据处理的问题,具体的数据处理与实际的应用需求有关,也与应用层协议的要求有关,这个例子中实现的Modbus的数据处理函数并不是唯一的,但可参考其思路。
关于数据解析的问题,在本例中实现的是Modbus TCP服务器的解析函数。对于不同的应用协议需要编写不同的解析函数,这部分是灵活性最大的,支持所有可运行于TCP应用层的通讯协议。
关于多客户端访问的问题,W5500可以实现8个Socket,而Modbus TCP默认端口号是502,当然也可以使用其它端口。所以我们可以考虑使用不同的Socket和不同的端口号来实现并发访问。事实上,经过我们测试使用同一个Socket和不同的端口也是可以实现多客户端访问的,有兴趣的同仁可以试试。
-
w5500随机出现接收问题2025-05-15 9424
-
W5500 keep-alive的用途与用法2014-08-04 13788
-
WIZnet W5500的特点和应用介绍2015-05-05 6729
-
野火STM32+野火W5500实现服务器功能的问题2015-11-18 5217
-
W5500无法连接服务器2016-06-25 8816
-
W5500芯片通信问题2016-12-11 5071
-
W5500接收巨型数据包有什么好用的办法2017-06-05 13924
-
W5500在TCP Client模式下,断电重启之后无法立即连接到服务器2018-05-04 8396
-
基于FPGA和W5500的以太网传输系统实现2018-08-07 8232
-
STM32 W5500是如何提交数据到远程服务器的2021-11-26 2388
-
硬件SPI驱动W5500网口2023-06-12 6946
-
w5500原理图_w5500电路图2017-10-23 62491
-
W5500数据手册免费下载2021-05-18 1427
-
RaspberryPi Pico Web服务器w5100S(W5500)2022-11-10 1463
-
W5500 数据手册中文资料2023-01-06 1594
全部0条评论

快来发表一下你的评论吧 !
