

雷达系统之单脉冲跟踪技术
MEMS/传感技术
描述
雷达在检测到目标后,通常会在雷达的覆盖范围内继续“检测”目标,使用检测的信息来获得目标更准确的位置并能够预测目标位置,所有这些功能被称为跟踪。在脉冲雷达跟踪模式下,当雷达锁定目标时,跟踪并自动维护关于目标的关键数据:距离,方位角和俯仰角。
距离跟踪
距离跟踪通常使用称为距离门的技术完成,该技术在距离增加或减少时自动跟踪目标。距离门的概念如下所示:
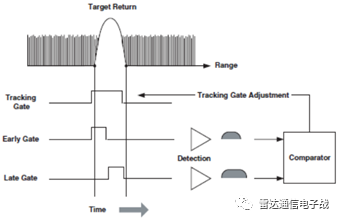
雷达回波将包含噪声和目标回波,距离门技术使用两个门,一个“Early Gate”和一个“Late Gate”。“Early Gate”位于目标回波的前沿附近,并从目标回波的早期部分检测并捕获能量。 相反,“Late Gate”位于目标回波的后沿附近,检测并捕获目标回波后沿的能量。比较来自“Early Gate”和“Late Gate”的检测信号,并将结果用于定位跟踪门,使其与目标回波一致。
角度跟踪
在雷达跟踪模式中,雷达跟踪目标的方位角和俯仰角。这里主要介绍单脉冲跟踪技术。单脉冲是大多数现代雷达的首选跟踪方法,不仅因为它非常准确,而且它很难被欺骗。
“单脉冲”意味着可以基于单个脉冲而不是波束序列或完整的圆锥形扫描来确定,因而跟踪速率更高更准确。另一个优点是基于同时接收所有四个通道中的目标回波,可以忽略回波在时间上的变化。
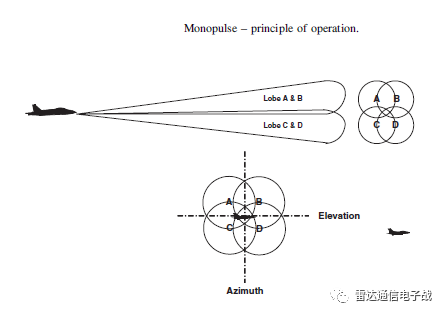
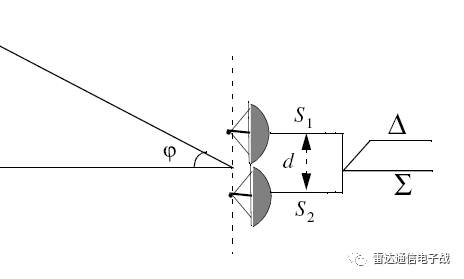
上图显示了单脉冲的跟踪原理,它使用两到四个同时的波束,其中波束以俯仰角和并排的方式堆叠在一起。单脉冲跟踪技术可以使用相位或振幅比较来实现跟踪任务。
比幅单脉冲
根据IEEE标准中的定义,比幅单脉冲雷达的目标与天线轴的角度偏差由测量同一目标在两个接收方向图上的幅度比较得到。方向图可以是处在天线轴两边的一对波束,也可以是相对于轴是奇对称的差通道波束和偶对称的和通道。下图中的四个通道可以组成方位和俯仰方向的和差方向图。
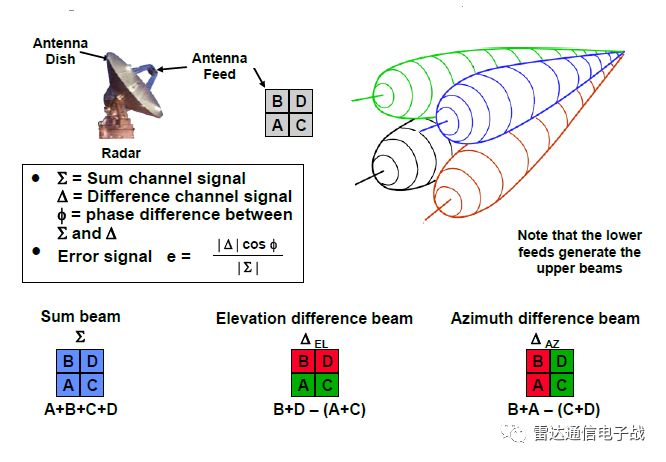
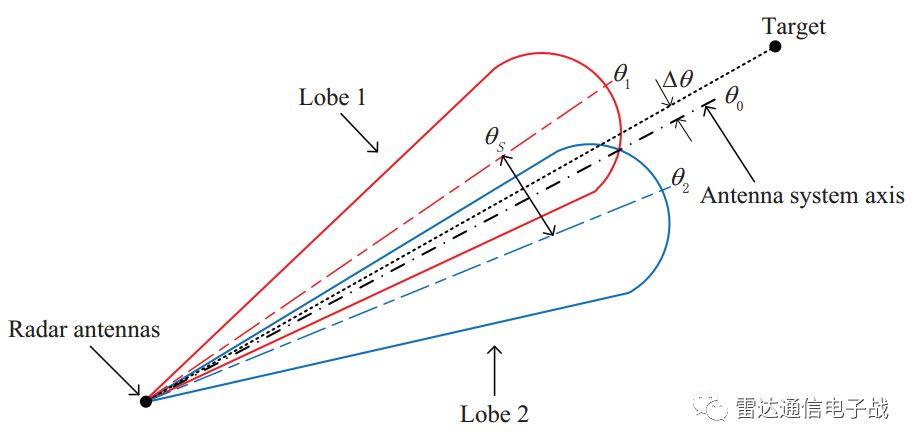
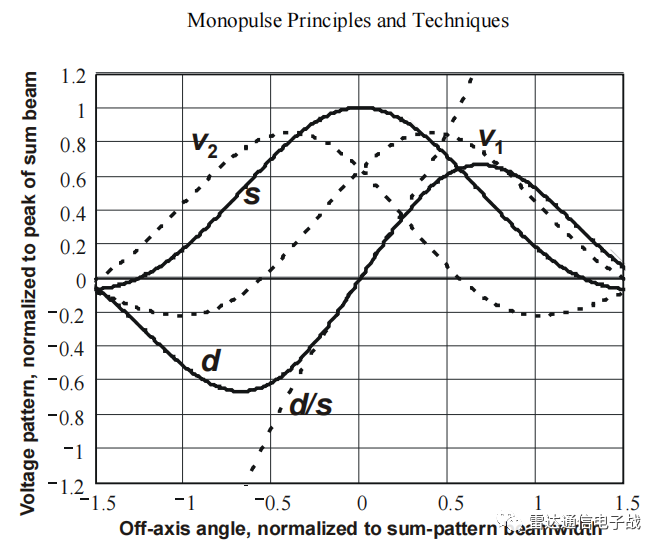
对于比幅单脉冲,所有四个波束都偏离天线视轴一点(通常使得它们在波束的半功率波束宽度处重叠)。 将平面内两个波束接收到的回波信号进行比较,就可取得目标在这个平面上的角误差信号,然后将此误差电压放大变换后加到驱动电动机控制天线向减小误差的方向运动。因为两个波束同时接收到回波,故单脉冲测角获得目标角误差信息的时间可以很短,理论上只要分析一个回波脉冲就可以确定角误差。
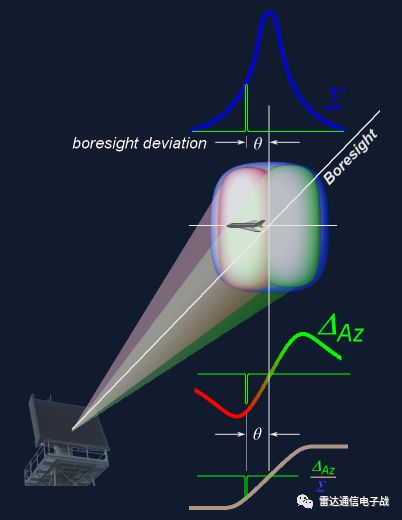
振幅和差式单脉冲雷达取得角误差信号的基本方法是将这两个波束同时收到的信号进行和差处理,分别得到和信号和差信号。若目标处在天线轴向方向(等信号轴),误差角为零,则两波束收到的回波信号幅度相同,差信号等于零。
目标偏离等信号轴而有一误差角时,差信号输出振幅与误差角成正比,而其符号(相位)则由偏离的方向决定。和信号除用作目标检测和距离跟踪外,还用作角误差信号的相位基准。
比相单脉冲
对于比相单脉冲,系统使用2个单独的天线(也可以是4个天线)照射空间中的远区目标,不像在比幅单脉冲系统中的波束斜视,在比相单脉冲系统中波束保持平行。
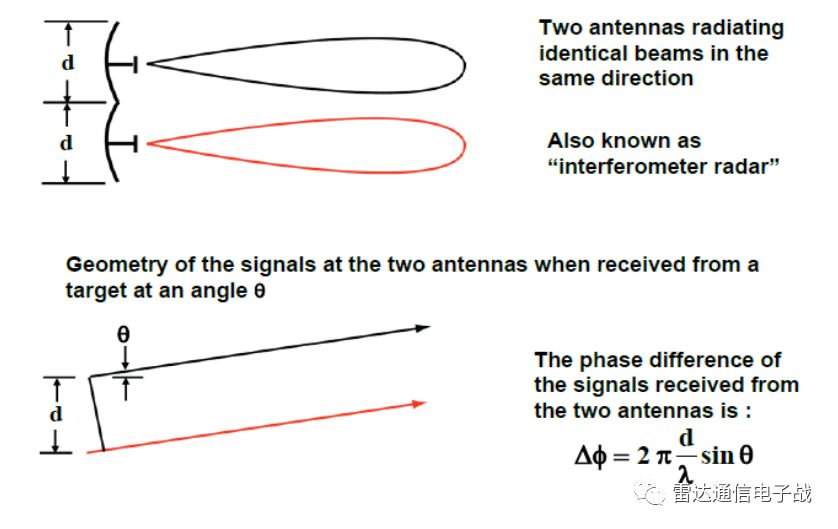
因为波束是平行的,所以如果目标位于中心,雷达回波将同时到达两个天线并且具有相同的相位。另一方面,如果目标与视轴成一定角度,则雷达回波将比另一个天线延迟一定的相位。
一般来说,比相单脉冲的主要优点是精度要高得多,而比幅单脉冲具有更好的信噪比。由于单脉冲跟踪技术需要2或4个独立的雷达波束,因此可以执行单脉冲跟踪的雷达系统需要有多个天线(或使用AESA系统)。因此,增加了系统的复杂性和成本。
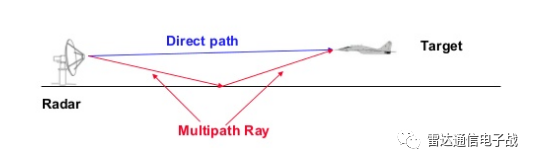
虽然通过单脉冲跟踪是非常精确的,但有且只有一个目标被跟踪时才能实现完全性能。当雷达分辨单元内存在多个目标或存在多路径反射时,单脉冲跟踪精度将会受到严重影响。
编辑:黄飞
-
使用TMS320C40 DSP实现单脉冲雷达的数字跟踪器2024-10-28 578
-
揭秘单脉冲雷达精准锁定目标技术2024-04-29 1918
-
什么是单脉冲点焊和双脉冲点焊?2024-02-18 10930
-
单脉冲雷达是指什么?2023-03-30 8629
-
单脉冲雷达技术.上海无线电二厂编2021-10-18 808
-
如何用EPLD实现单脉冲二次雷达的应答解码处理2021-04-30 2482
-
基于EPLD的单脉冲二次雷达应答处理器设计与实现2017-12-12 2068
-
机载脉冲多普勒雷达单目标跟踪系统仿真2016-08-24 702
-
三路单脉冲雷达接收机DAGC技术的工程实现2012-08-16 2950
-
基于DDS的单脉冲体制雷达目标模拟的实现2011-11-30 1066
-
单脉冲FMCW雷达DSP功能2011-02-27 1657
-
单脉冲采样电路2010-05-24 4656
-
指向和单脉冲跟踪在车载动中通中的应用2010-04-28 771
全部0条评论

快来发表一下你的评论吧 !
