

在16通道演示器中验证的基于经验的多通道相位噪声模型
描述
作者:Peter Delos and Michael Jones
本文详细介绍了一种预测大型多通道系统中相位噪声的系统方法,并将其与16通道S波段演示器的测量结果进行了比较。这种分析方法基于一小组测量值,可用于估计相关与不相关的噪声贡献。仅基于少量测量,就可以预测各种条件下的相位噪声。该观点认为,任何特定设计都需要自己的系统噪声分析,16通道演示器提供特定的设计示例作为基础。本文讨论了基于16通道演示器的假设,以及随着系统复杂性的增加,何时适用这些假设以及何时添加额外噪声项的限制。所提供的描述基于描述RF系统中相位噪声优化的一系列工作。1–6在适当的情况下,提供了描述本分析中使用的基本原则的参考资料。
介绍
相位噪声是所有RF系统设计中的关键性能指标。在通道相干组合的大型多通道RF系统中,例如相控阵,一个目标是通过分布式接收器和发射器的相干组合实现阵列级动态范围的改进。实现此目标的系统工程挑战是考虑系统中既相关又不相关的噪声项。本文旨在通过介绍一种用于估计16通道RF演示器相位噪声的系统方法,帮助系统工程师开发分析方法来估计大型系统的噪声性能。
相控阵中的任何信号都将包含跨通道不相关的噪声项和跨通道相关的噪声项。分布式组件的加性噪声是不相关的。但是,用于分布式组件的共享信号会产生相关的噪声分量。挑战在于如何快速可视化架构中的相关噪声项。任何常见或共享的内容都可能导致跨通道的相关噪声。示例包括共享 LO、时钟或电源。随着系统复杂性的增加,跟踪这些噪声项变得非常麻烦。因此,从噪声角度重新绘制架构并快速识别相关噪声贡献者的直观方法,对于构建下一代系统的系统工程师是有益的。
在本文中,我们演示了一种使用16通道S波段系统的方法,并表明只需几次经验测量,就可以很好地预测各种其他通道组合条件下的相位噪声。这个经验模型的关键点之一是需要一些测量。从组件仿真直接到具有良好精度的大型多通道相位噪声估计可能很困难。但是,只需进行少量测量,就可以提取相关和不相关的噪声项,从而使多通道估计非常准确。我们的测量结果与 16 通道 S 波段演示器的预测值在 1 dB 以内相匹配。
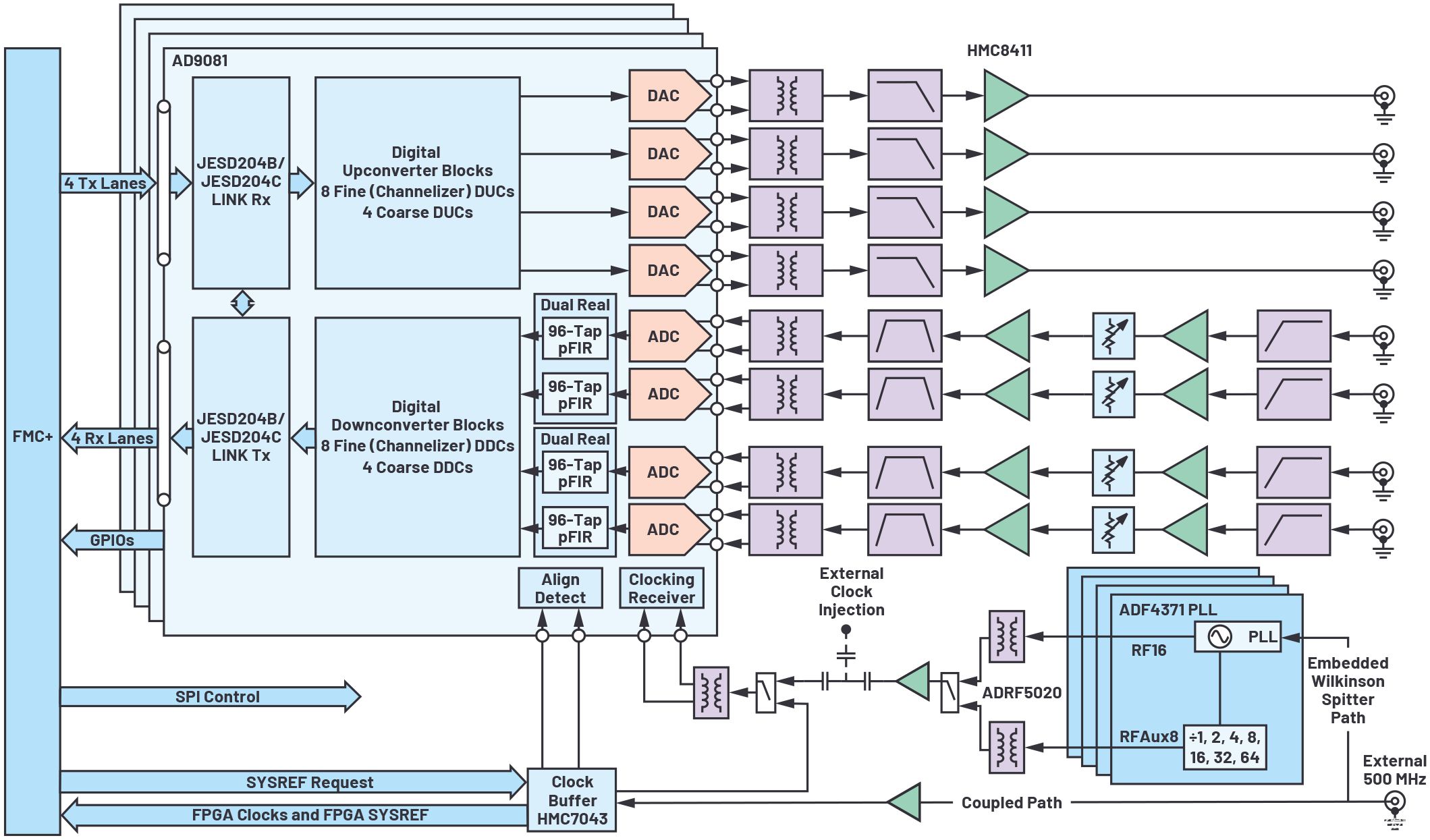
图1.16通道演示器:该平台包含4个AD9081 IC。每个AD9081包含4个RF DAC和4个RF ADC,总共提供16个发射通道和16个接收通道。
对相关噪声和不相关噪声求和的背景
当信号在自由空间或RF处理中组合时,每个信号的噪声增加为

其中 c 是相关系数,范围从 –1 到 +1。如果 c = –1,则噪声抵消;如果 c = 0,则噪声不相关;如果c = 1,则噪声完全相关。
假设有一个校准来相干地组合主信号,主信号将以20logN的水平增加,其中N是通道数。
如果噪声项不相关(c = 0),则噪声将增加10logN。随着信号电平以20logN速率增加(速率比噪声高10logN),由此产生的SNR改善为10logN。
如果噪声项相关(c = 1),则噪声也会以20logN的速率增加,与信号相同,并且不会有SNR改善。对于分布式系统,这不是一个理想的结果。
在降噪电路中,会产生负相关系数。为了公式1,本文对此进行了说明,但不再进一步描述。
实际上,大型分布式系统的噪声分量在通道之间部分相关。然而,需要一种实用且直观的方法来开发系统级噪声模型。
16通道演示器
开发了一个16通道直接S波段RF采样平台,用于在多通道环境中评估最新的高速数据转换器。该平台包含四个AD9081 MxFE(混合信号前端)IC。每个AD9081包含4个RF DAC和4个RF ADC,总共提供16个发射通道和16个接收通道。®
该 16 通道评估平台因其四个 MxFE IC 而被命名为 Quad-MxFE。整体框图和电路板照片分别如图1和图2所示。

图2.Quad-MxFE是一款16通道演示器。
多通道相位噪声模型
图 1 中的 16 通道开发平台框图显示了功能范围。从此图中,最初并不明显如何根据相关与不相关的噪声分量来可视化噪声贡献者。需要一种方法从噪声的角度考虑架构。适当的草图可以阐明所有通道中通用的噪声项、仅在通道组之间相关的噪声项以及跨通道完全不相关的噪声项。图3显示了16通道开发平台,并将噪声项分为三类。
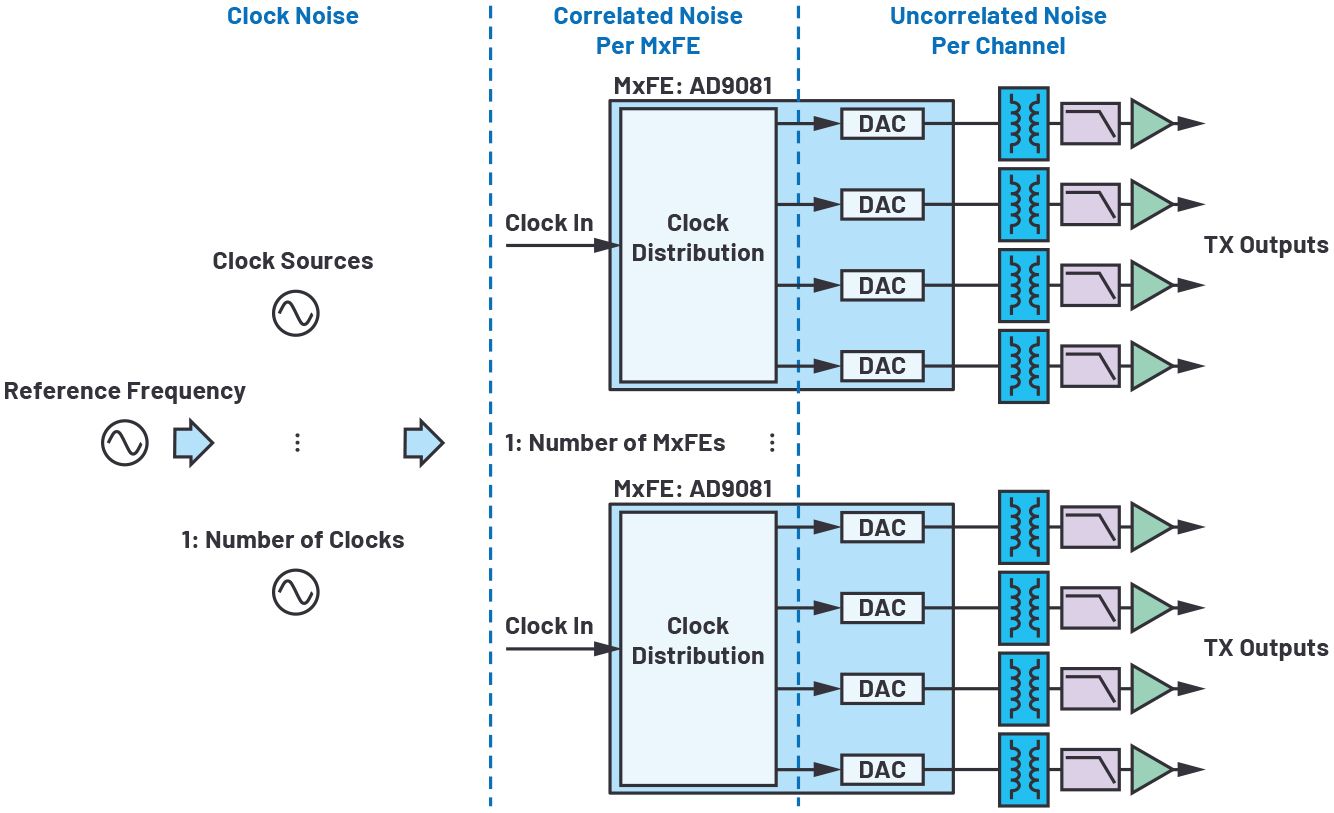
图3.图1从时钟相位噪声角度重绘。
时钟噪声:四通道 MxFE 提供多种时钟配置选项。在相位噪声模型中需要考虑所使用的特定配置。在我们的测试中,我们在所有通道上使用一个通用的低相位噪声时钟,或者使用四个独立的分布式ADF4371锁相环(PLL)频率合成器作为四个MxFE中每个频率的时钟输入。对于单个公共时钟,该噪声将与所有16个组合通道相关。对于使用四个ADF4371 PLL(每个MxFE一个)的情况,PLL噪声将每个MxFE相关,但在MxFE之间不相关,而参考噪声将在所有通道中相关。
Peter Delos的文章“具有分布式锁相环的相控阵的系统级LO相位噪声模型”总结了处理分布式锁相环的分析方法。本基准电压源中的分析方法考虑了参考频率、配电系统和PLL电路的噪声成分,并考虑了PLL环路带宽效应。
每个 MxFE 的相关噪声:这是来自 MxFE 的噪声,与 MxFE 中的每个通道相关。对于此分析,每个MxFE的相关噪声包括IC内常见的加性噪声以及IC内通道常见的任何电源效应。
每个通道的不相关噪声:这是每个通道不同的噪声。它包括DAC内核和所有放大器残余相位噪声。在公式2中,该术语被注释为TXNoise。
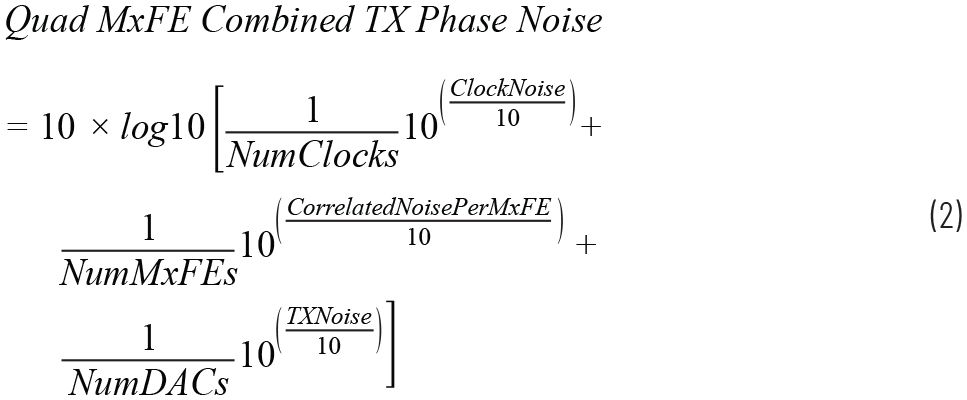
根据所述贡献因素的相位噪声,组合相位噪声可以计算如下。
接下来,还有一些其他细节,允许将模型简化为此测试平台的这种形式。
电源效应:电源相位噪声贡献是低相位噪声设计中的一个重要考虑因素。文章“电源调制比揭秘:PSMR与PSRR有何不同?”和“改进的DAC相位噪声测量可实现超低相位噪声DDS应用”中介绍了解决电源噪声问题的方法。对于本文的分析,电源效应被认为是公式2中噪声项的一个子集。如果电源噪声是IC的主要相位噪声贡献因素,并且跨通道共享,则需要将这种影响视为一个相关术语,类似于本文前面使用的每MxFE的相关噪声。
参考振荡器噪声:在大型系统中,参考振荡器噪声贡献需要按照文章“具有分布式锁相环的相控阵的系统级LO相位噪声模型”中所述进行分配。在该测试平台中,使用了非常低的相位噪声基准,该基准电压源远低于其他贡献因素,并且在组合噪声方程中没有特别指出。
用于通知模型的测量
使用公式2中描述的组合相位噪声模型,下一个问题是“我们如何得出方程中使用的噪声贡献值?对于 Quad-MxFE 测试台,可以使用三种测量来提取所需的信息:
时钟源的绝对相位噪声
来自不同 MxFE 的通道的残余相位噪声
来自同一 MxFE 的通道的残余相位噪声
与测量一起使用的测试设置如图4所示。图4(b)和图4(c)均提供消除公共时钟源的残余噪声测量。当测量单个MxFE内的残余相位噪声时,MxFE内跨通道的相关噪声也会被抵消。但是,当测量MxFE上的残余相位噪声时,测量中会捕获MxFE中的相关噪声。
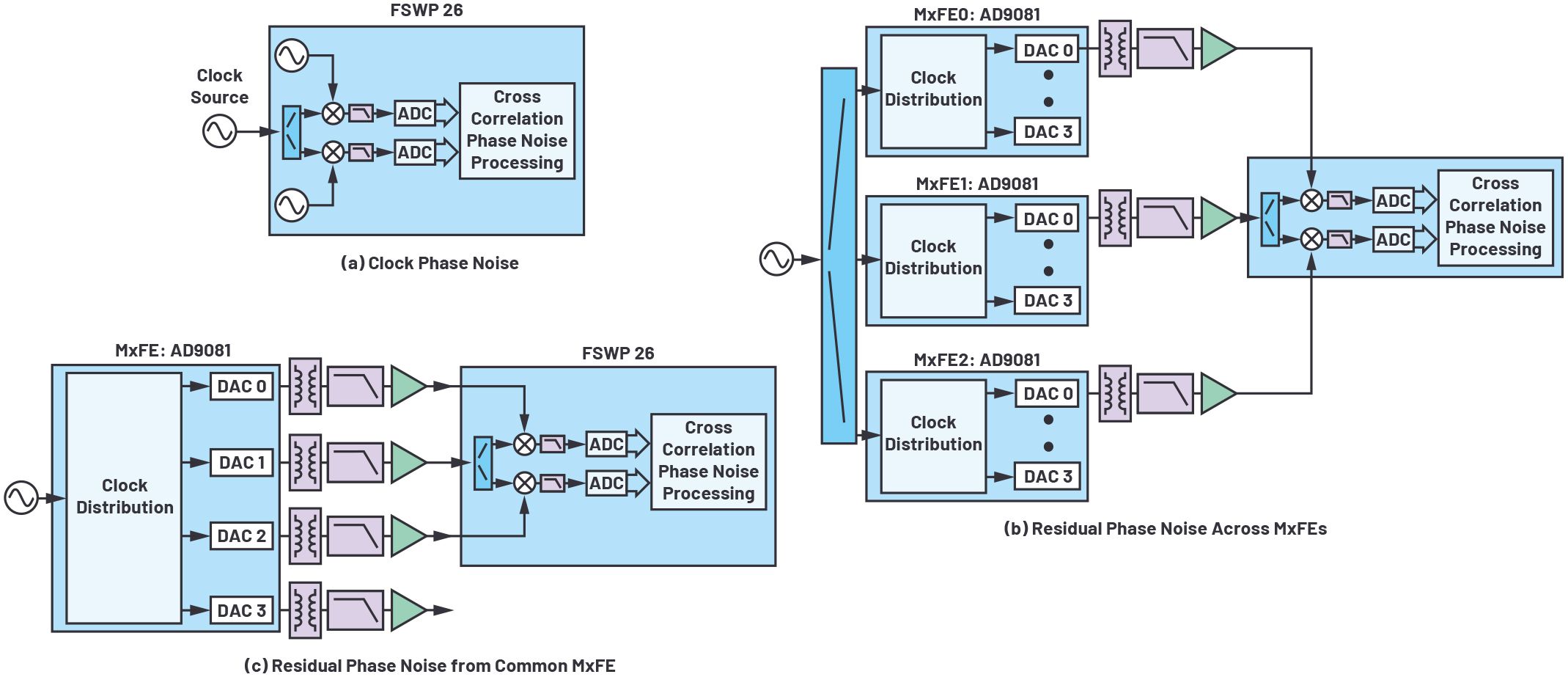
图4.使用三种测量来告知相位噪声模型。
最后一步是将测量数据修改为公式2的三个项,如下所示:
时钟噪声 = 时钟相位噪声测量(图 4(a))+ 20log(F外/FCLOCK)
每个 MxFE 的相关噪声 = MxFE 上的残余相位噪声(图 4(b)) – 来自公共 MxFE 的残余相位噪声(图 4(c))。请注意,对于此计算,您需要转换为线性功率,然后减去,然后转换回dB,使得10log(10^(MxFEs/10的残余相位噪声)– 10^(来自公共MxFE/10的残余相位噪声))
Tx噪声 = 来自公共 MxFE 的残余相位噪声(图 4(c))。
关于残余相位噪声测量的补充说明:我们发现,通过该硬件,上述项目2和3的噪声项也随频率而变化。当转换为其他频率时,额外的20log(F外/F多边环境协定) 是必需的。并非所有硬件都如此,应针对每个设计独立评估此术语。
测量案例1:普通低相位噪声时钟
对于此测量,整个16通道演示器使用单个低噪声12 GHz时钟。时钟源是SMA100B,注入到图1所示的外部时钟注入节点中。所示条件适用于 3.2 GHz 发射输出频率。
从图5(b)中,我们看到MxFE之间的相关噪声是最大的贡献者。随着系统中MxFE的增加,这种噪声贡献将得到改善,然后受到公共时钟噪声的限制。对于每个贡献者的曲线形状,仅沿曲线添加几个点不足以进行准确的预测,因此我们发现最好直接在公式2中使用图5(b)中的数据。接下来,进行了一系列测量以验证模型。该模型以惊人的准确性预测结果,在查看图 6 到图 8 后可以观察到。
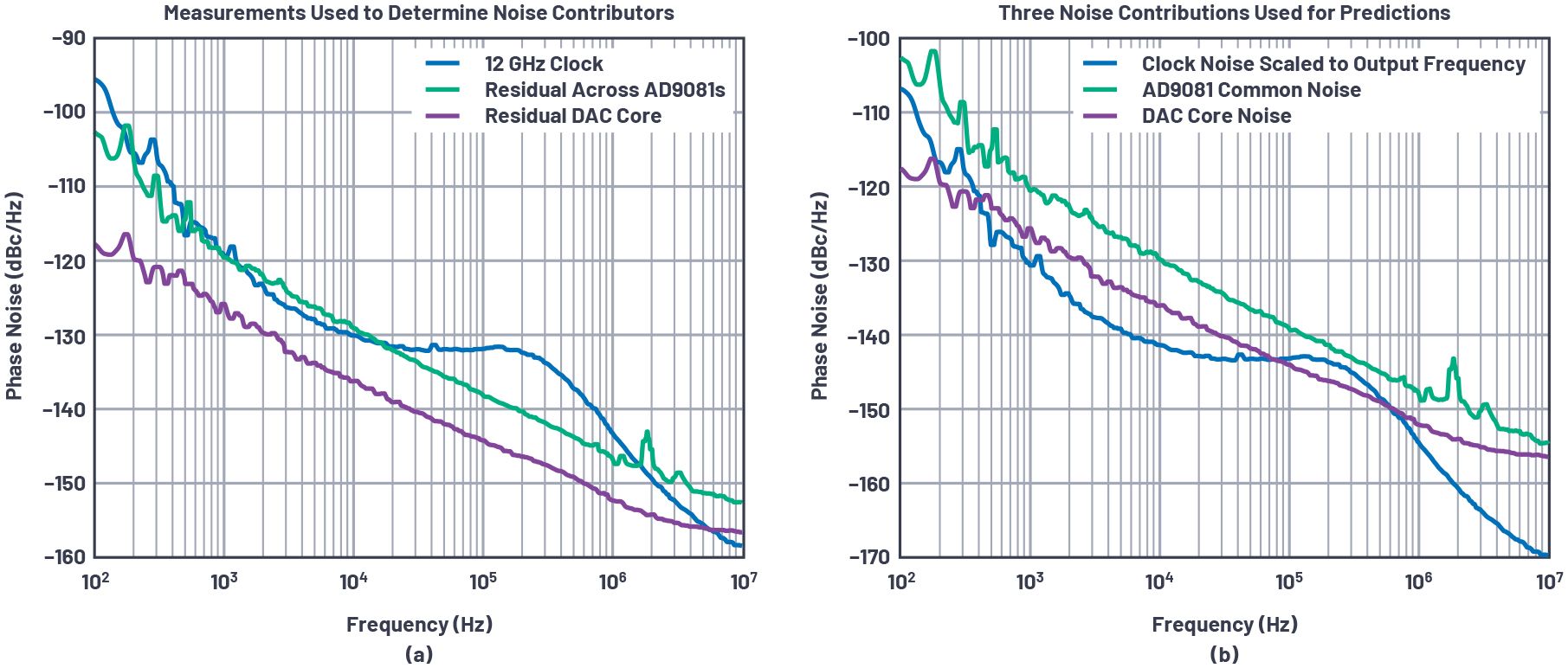
图5.a) 为告知相位噪声模型而进行的测量,以及 b) 计算出要在模型中使用的相位噪声贡献者。这适用于所有 MxFE 的单个公共时钟的情况。
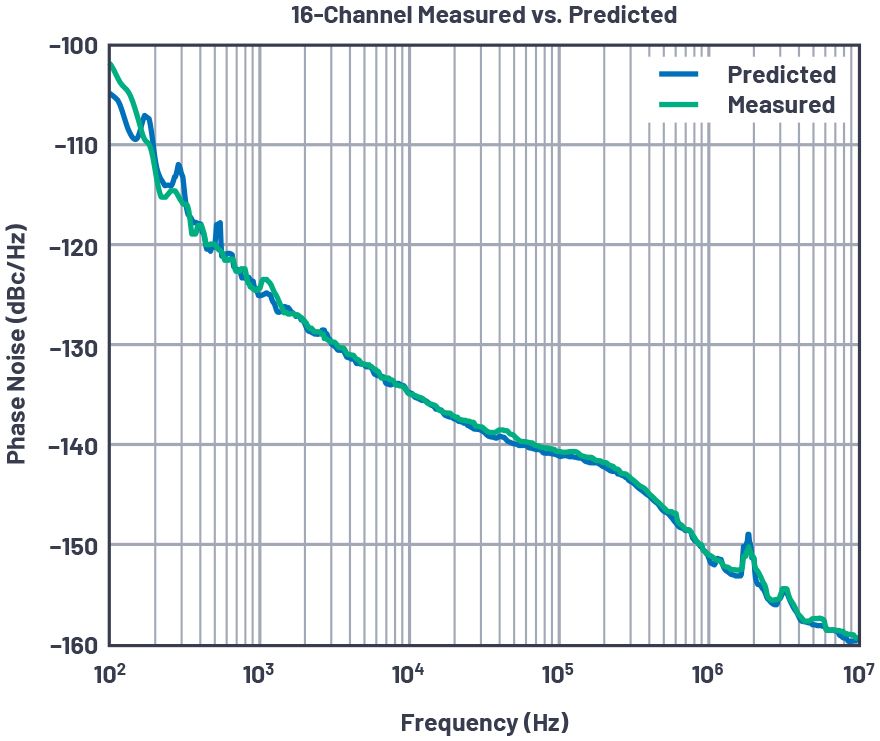
图6.3.2 GHz 下 16 个通道的测量与模型预测。
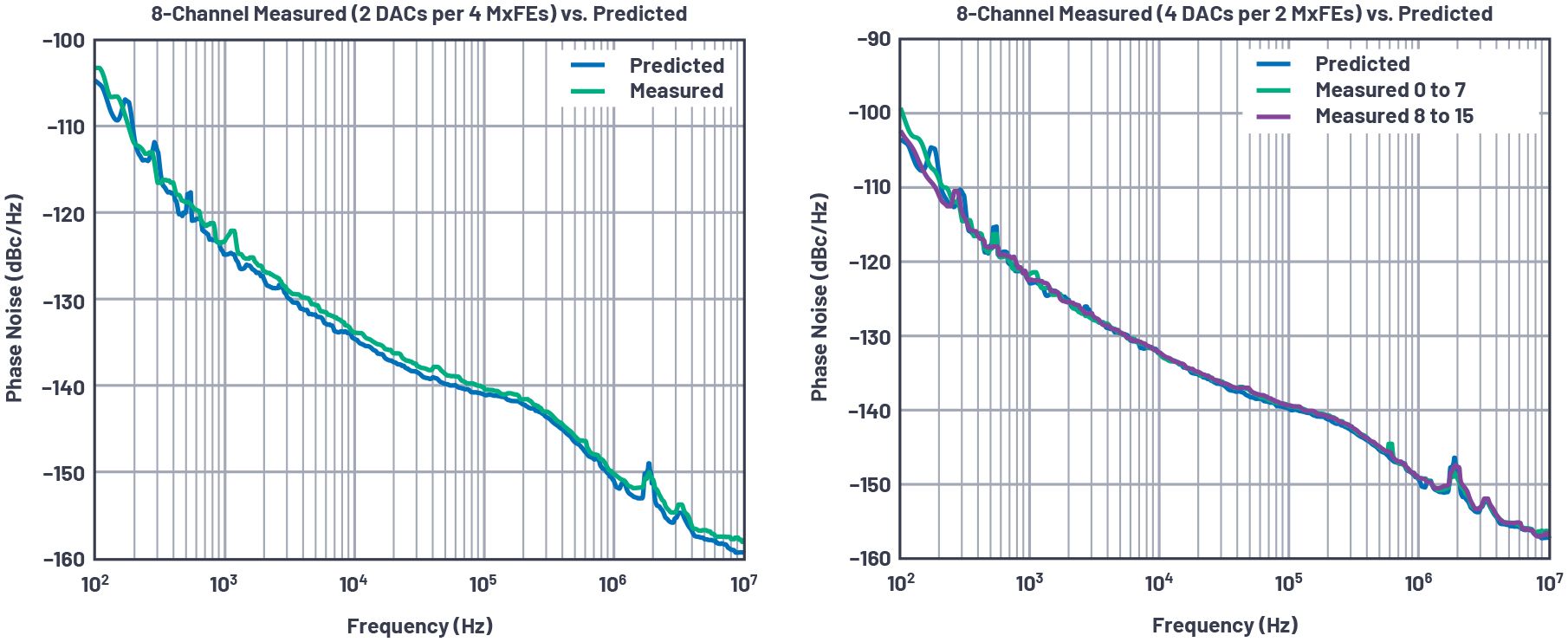
图7.3.2 GHz 下八个通道的测量与模型预测。两个图中的区别在于发射通道如何在 MxFE 之间共享。
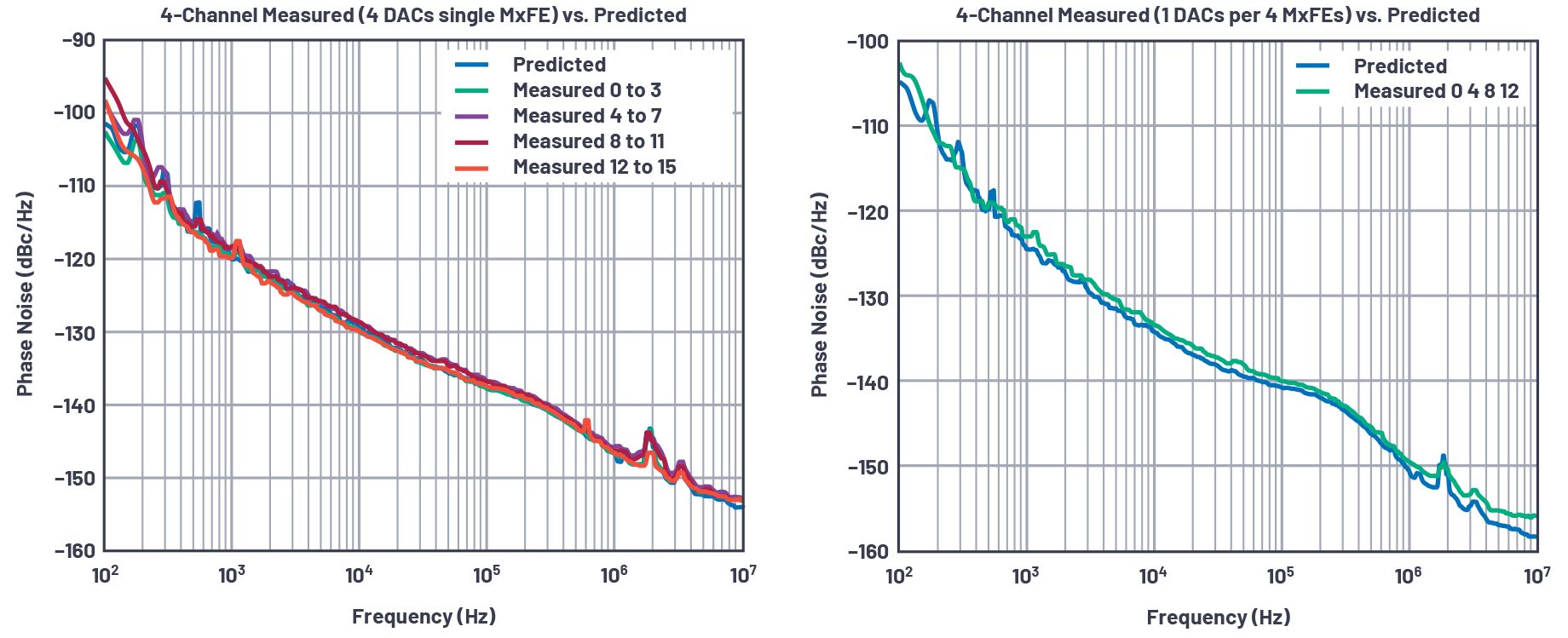
图8.3.2 GHz 下四个通道的测量与模型预测。两个图中的区别在于发射通道如何在 MxFE 之间共享。
关于测量与预测的一些观察值得注意。在许多情况下,预测与测量值几乎相同。在某些情况下,测量值与预测值略有下降。我们在这里承认这一点,但没有确切的描述。图 8 中的左图提供了一个潜在指标。放大这些图时,我们注意到预测与两个测量事例匹配,并且两个实测事例略高。AD9081 IC中每个MxFE的相关噪声可能不相同,从而导致一些差异。第五节所述的一些简化假设可能是一个促成因素。无论哪种情况,预测都非常准确,我们认为该方法针对这种特定设计进行了验证。
测量案例 2:每个 MxFE 的分布式 PLL
对于此测量,四个MxFE中的每一个都使用单独的ADF4371,如图1所示。ADF4371锁相至低相位噪声500 MHz基准电压源,并针对12 GHz输出进行编程。图9显示了用于通知模型的测量值和噪声因素。
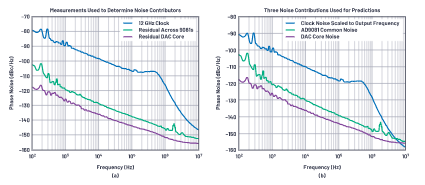
图9.a) 使用单独的ADF4371芯片作为时钟输入源时为告知相位噪声模型而进行的测量,以及 b) 计算出要在模型中使用的相位噪声贡献因素。这适用于每个 MxFE 的分布式 PLL 的情况。
在这种情况下,PLL是主要的噪声源,而MxFE噪声贡献因素远低于时钟噪声。组合噪声根据分布式系统中使用的PLL数量而改善,如图10所示。
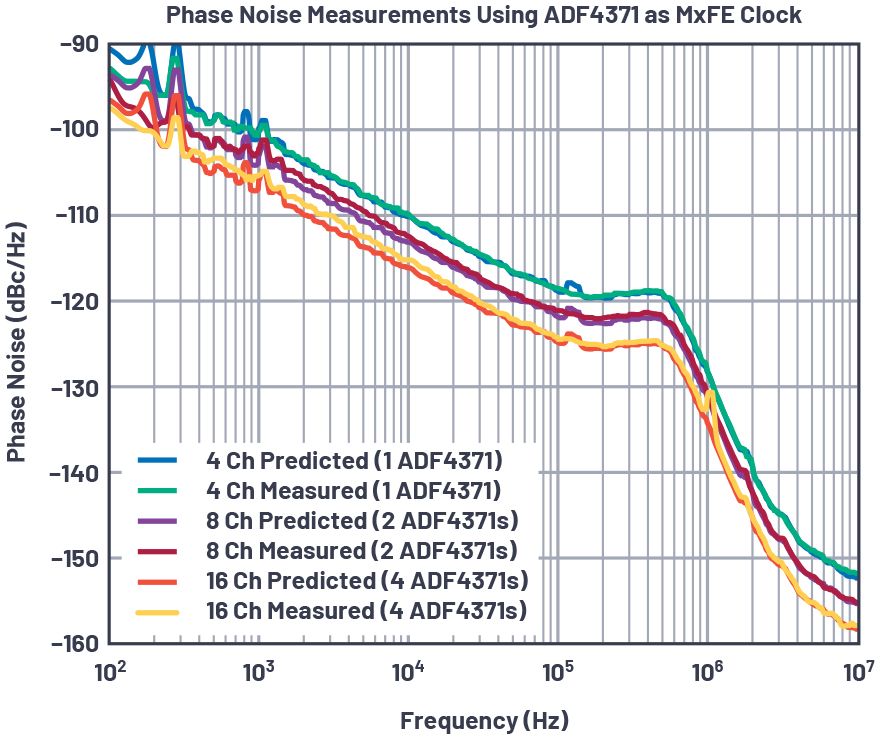
图 10.使用ADF4371作为每个MxFE的时钟源时,组合各种相位对齐发射通道后,在3.2 GHz下测量与建模预测。
结论
本文展示了一个经验模型,该模型可以非常准确地预测组合通道的相位噪声。该方法的前提是首先从噪声源的角度查看系统,然后重新绘制框图,以便轻松查看相关项和不相关项。
我们还强调“经验”一词,这意味着所提出的方法可以通过观察或经验而不是理论或纯逻辑来验证。对于相位噪声的情况,需要一些测量和观察来评估趋势和贡献因素。一旦了解了这些,就可以系统地计算系统噪声。
本文中使用的数据和方程式在某种程度上特定于硬件,并基于前面描述的观察结果。但是,该方法可以扩展到任何多通道系统。更通用的框图如图 11 所示。从系统参考振荡器开始,然后绘制时钟和LO分布以及通道级硬件,就可以更直接地可视化大型系统中的噪声贡献因素。
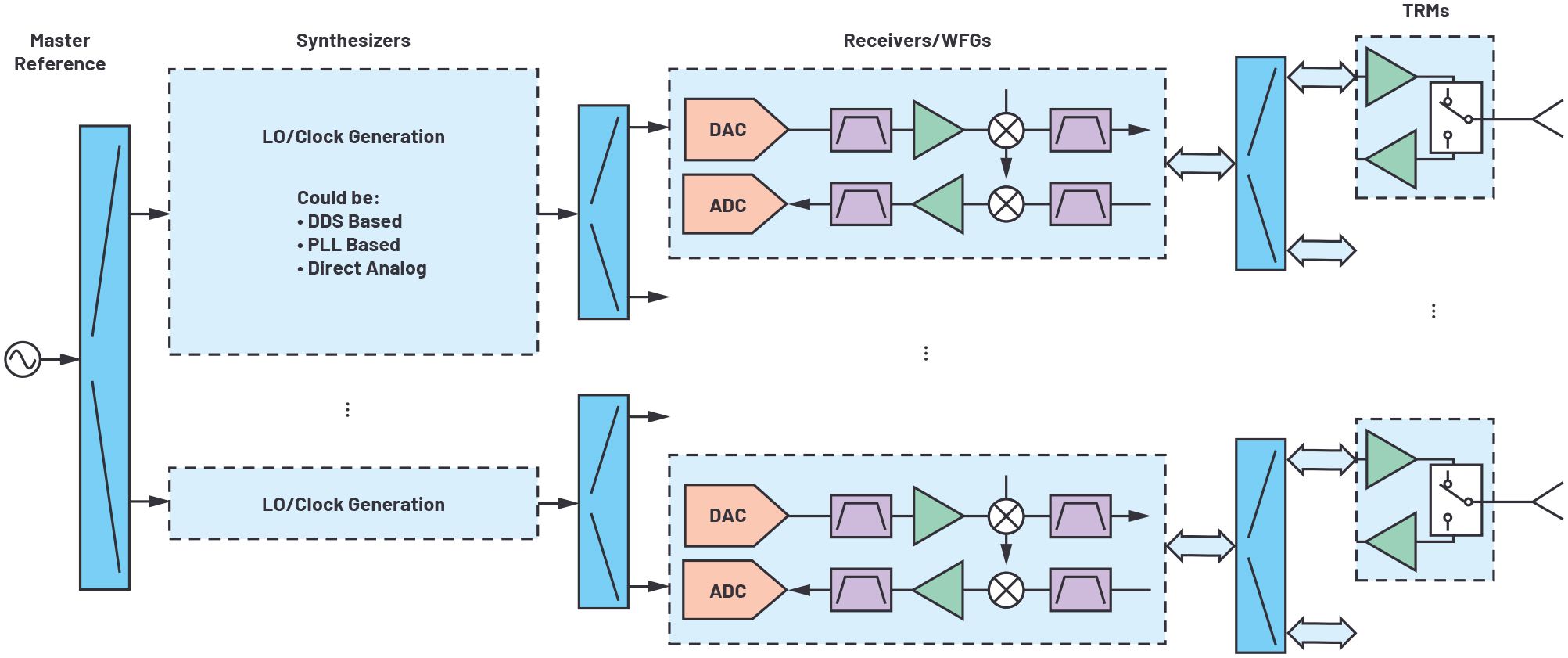
图 11.从相位噪声角度看广义相控阵图。每个信号都包含噪声项,这些项是分布在整个阵列中的噪声分量的组合。通过从这个角度重绘系统,可以更轻松地在系统级别可视化相关噪声与不相关噪声的跟踪。如果设计人员从系统参考振荡器开始,绘制时钟和LO分布以及通道级硬件,那么在大型系统中可视化噪声贡献因素会更加简单。
审核编辑:郭婷
-
AP多通道测试解决方案重磅升级 — 全面支持 16通道ASIO2025-09-17 1108
-
Xgig CEM 16通道转接器模块JDSU2025-09-11 4493
-
Xgig E3 EDSFF 16通道内插器2025-08-01 3919
-
国产8/16通道ADC用于多通道精密采集,替换AD41152025-03-31 1673
-
四通道16位电压/电流输出DAC节省多通道PLC的空间、成本和功耗2023-11-22 549
-
在16通道演示器中验证的经验型多通道相位噪声模型2023-06-15 1408
-
多通道声光调制器AOMC(最多可达16通道)2022-06-14 2923
-
AD7794/AD7795: 6通道、低噪声、低功率24/16位2022-03-22 1043
-
演示电路1199A是采用LT3595EUHH的16通道降压模式LED驱动器2019-09-03 2116
-
CW01DB1,演示板使用CW01K6 4通道,低相位噪声,低功耗,连续波发射器2019-08-21 2577
-
用于LTC2373CUH-16的16位1Msps 8通道SAR ADC的演示板2019-06-20 2424
-
用于LTC2373CUH-18的18位1Msps 8通道演示板2019-06-19 1750
-
16通道间隔离型模拟输入解决方案2019-02-20 2480
-
多通道采样电路2010-05-24 3449
全部0条评论

快来发表一下你的评论吧 !
